TRINAMIC 運動控制公司。KG宣布推出令人印象深刻的2相雙極步進伺服電機模塊,每個軸帶有獨立的編碼器和HOME / STOP輸入。為了確保步進電機相應驅動,堅固的步進電機伺服模塊帶有強大的TMC5160和專用的閉環運動控制器TMC4361。
2018-07-25 11:03:08 9492
9492 電機的運動需要較大的電流,這取決于電機本身和負載,所以通常需要驅動芯片。而且驅動芯片可以實現許多附加的功能,包括細分、休眠、保護等。本次采用的是DRV8825驅動芯片模塊。
2020-09-09 16:49:088866 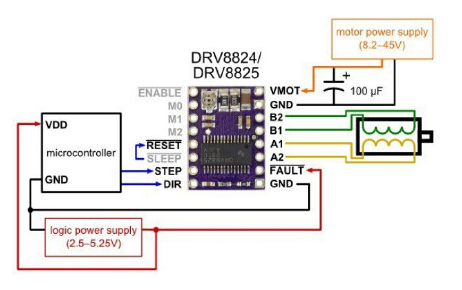
之前小白白寫過一篇步進電機驅動基礎,講了最基本的步進電機驅動方法。
2022-10-19 15:50:571645 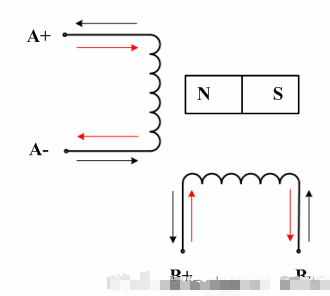
在本項目中,我們將為基于電機的應用制作一個 8 通道電機驅動器模塊電路。在該電路中,我們設計了用于驅動直流或步進電機的PCB。通過使用此電機驅動板,我們可以一次操作 8 個直流電機或四個 4 線步進電機。
2022-11-30 17:50:312267 步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當
2011-10-04 10:52:582908 42步進電機常用有哪些驅動模塊,各有什么差異
2023-10-15 11:03:11
如圖為M415步進電機驅動器Signal端PUL為脈沖輸入信號。DIR方向輸入信號,用于改變電機運轉方向;ENA為使能信號,用于使能或禁止驅動器輸出;OPTO為脈沖、方向、使能信號電源正端,接5v
2022-01-06 07:51:28
雙通道超低噪聲 256 細分微步進低壓電機驅動功能描述MS41919 是一款雙通道 5V 低壓步進電機驅動芯片,通過具有電流細分的電壓驅動方式以及扭矩紋波修正技術,實現了超低噪聲微步進驅動。芯片另外
2019-02-16 09:40:02
兩相步進電機的驅動相電流的問題,為什么加速過程測的相電流是正弦波,一旦電機速度起來達到最大速度運行的時候測的電機相電流是變形的電流波形,這是什么原因導致的,有沒有辦法解決。
2020-03-28 20:33:24
兩相四線步進電機驅動原理可參考:https://blog.csdn.net/feiyinzilgd/article/details/5743730主要說一下步進電機驅動芯片作用。步進電機芯片的控制
2021-07-08 08:58:45
如果由單片機控制步進電機運動的話就要一直運算輸出脈沖信號,而不能進行其他操作比如實時檢測路線并轉向,這時要怎么辦才行?或者有沒有一種步進電機驅動模塊,單片機只要給一個方向和頻率信號模塊就能一直驅動步進電機運動的,即使單片機去進行其他運算,電機也能正常運動的?
2016-08-22 13:36:46
步進電機驅動芯片有:步進電機驅動芯片(UM12017、UM12014)完全代替VID6606、VID6608)還有PMM8713,BY-5064,A3955SB,ULN2003,ULN2803
2008-08-28 16:50:36
據實際使用,挑選了五款步進電機的驅動芯片:實際情況:驅動電機為 57步進和43步進。額定電壓24V,額定電流約為 1.7A。用到細分數為128 及 16細分。電機使用頻繁,實測 運行一段時間后溫度有
2021-08-31 07:05:46
TMC2660驅動芯片的步進電機驅動有哪些功能?步進電機的應用非常廣泛,在各種設備中經常會遇到,而步進電機的驅動則是使用步進電機必不可少的部分,可以有多種方式來實現步進電機的驅動,在這里我們來
2021-07-07 07:33:49
驅動程序一點也不復雜;德國TRINAMIC是全球嵌入式電機運動控制領導品牌,在設計和研發運動控制芯片,模塊,機電一體化產品具有20多年經驗。TMC將微步操作與先進的電流斬波器和電壓斬波器相結合,允許步進
2022-09-02 16:44:29
這是一個步進電機的驅動模塊,輸入電源以及無線接收模塊輸出的控制信號,輸出直接是步進電機的控制信號。誰知道這樣的模塊在哪里可以買到啊?
2016-10-13 10:21:59
如何使用ULN2003芯片驅動步進電機?
2021-10-18 08:26:47
步進電機的主要參數有哪些?DRV8825芯片有何功能?如何利用DRV8825芯片去驅動步進電機呢?
2021-12-21 06:56:23
常見步進電機驅動芯片有哪些?
2021-10-28 07:55:31
步進電機的基本原理是什么?步進電機的驅動方式有哪幾種?怎樣去設計一種基于ULN2003芯片的步進電機驅動電路?
2021-10-14 09:09:43
芯片提供PWM模塊所以這個不需要自己搭,需要步進電機的電源驅動
2013-09-10 11:19:28
有用過步進電機細分驅動模塊的嗎? a4988步進電機驅動芯片有用過的嗎
2014-12-29 17:19:01
LB1836M構成的步進電機驅動電路
2019-09-18 05:28:17
設計了一款利用步進電機驅動的指針式溫度表,該溫度表以AT89S52 單片機為核心,輔以步進電機驅動、數字溫度傳感器DS18B20 、L ED 顯示、報警器等硬件電路模塊組成,并對其軟、硬件設
2009-03-31 23:27:35 102
102 MOTEC 步進電機及驅動器:德國MOTEC公司多年以來一直致力于步進電機及驅動器的研究、開發、生產工作,是世界上步進驅動系統行業的領先者。該公司生產的兩項混合式步進電機正弦
2010-01-09 10:21:5955 基于3955的步進電機驅動器設計:步進電機驅動芯片3955引腳及功能介紹(1)3955概述及其引腳功能由Allegro公司生產的3955是一種用來驅動雙極型步進電機的一相繞組的驅動芯片。使用
2010-01-09 10:23:1750 步進電機的細分控制本質上是對步進電機勵磁繞組中的電流進行控制,在普通驅動方式下,驅動電路只是通過對電動機繞組激磁電流的“開”和“關”,使步進電動機轉子以其本身
2010-01-09 10:27:23223 闡述了步進電機的驅動原理,介紹了恒流斬波、脈寬調制及細分驅動等步進電機驅動電路的結構設計方法和設計中的相關技術,并給出了實現方案。關鍵詞:步進電機; 恒流斬波; 脈
2010-01-09 13:41:4999 二相步進電機驅動芯片TA8435H及其應用
摘要:TA8435H是東芝公司推出的一款單片步進電機專用驅動芯片。文中介紹了該芯片的特點、引腳功能和工作原理,給出了
2010-05-11 11:53:0587 摘要:本文以兩相雙極式步進電機為例,介紹了一種利用單片機自帶的PWM模塊實現步進電機細分驅動的方法。該方法充分利用單片機的PWM硬件資源,通過配置硬件PWM模塊,產生占空
2010-09-18 22:30:09185 本系統采用STM32作為主控制芯片,用L298驅動步進電機,并由按鍵分別控制步進電機的啟/停,快速/慢速,整步/半步,正轉/反轉,發光二極管顯示按鍵情況。實現了步進電機的基本功
2010-09-23 16:00:07719 針對工業界電機平穩高速運轉的需要,設計了兩相步進電機高速細分驅動模塊。模塊采用256步進細分實現步進電機的平穩工作,采用指令周期短的MC56F8323,壓縮步進處理指令數,盡
2010-12-08 17:09:4380 步進電機驅動電路(驅動芯片pmm8713)
2008-05-23 17:32:1233292 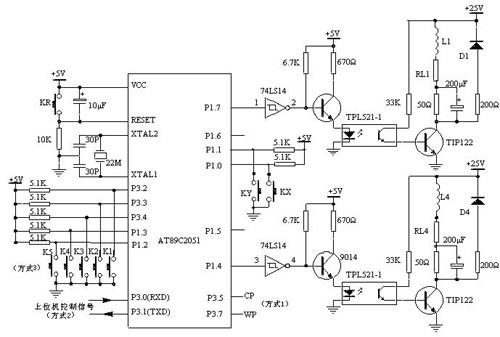
步進電機驅動芯片有:步進電機驅動芯片(UM12017、UM12014)完全代替VID6606、VID6608)
還有PMM8713,BY-5064,
2008-05-23 17:35:5511091 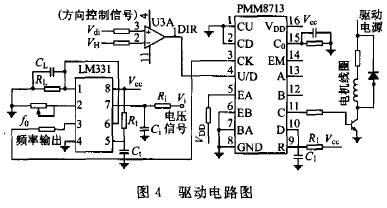
二相步進電機驅動芯片有a3955sb,TA8435H,LMD18245,SAA1042,MC33991,SJ-2057A等。
2008-05-23 17:47:022103 步進電機驅動芯片有:步進電機驅動芯片(UM12017、UM12014)完全代替VID6606、VID6608)
還有
2008-08-29 12:32:331954 四相步進電機驅動電路和驅動程序
步進電機驅動器系統電路原理圖
2008-10-21 00:42:206696 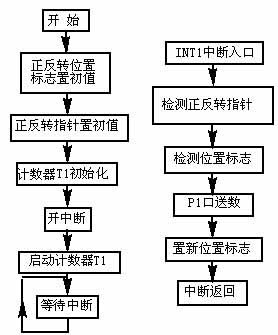
步進電機驅動電路
2009-02-09 12:47:591788 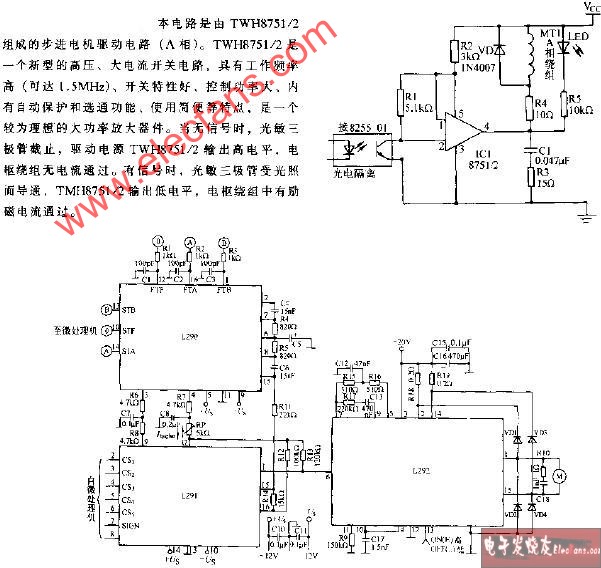
使用集成芯片的步進電機驅動電路
2009-02-09 13:59:19919 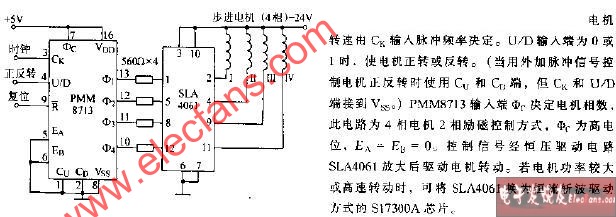
五相步進電機驅動電路
2009-02-09 14:07:394463 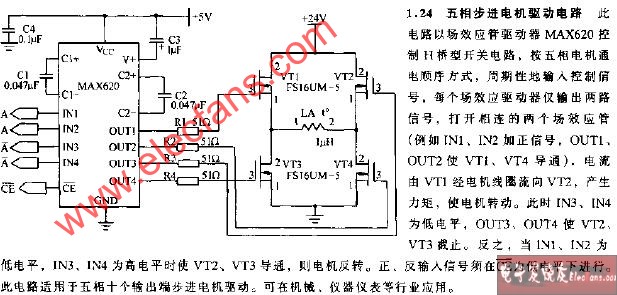
步進電機控制芯片TC1002 是一個高性能二相步進電機細分驅動控制器。TC1002支持14 種細分等級,最大256細分,最大支持4.2A和8.0A電流.....步進電機控制芯片TC1002的應用驅動電路如下,上面這種應用是
2011-07-27 18:33:1811641 
LT2221熱敏打印機芯的進紙操作由機芯內的步進電機完成。驅動電路由A3967步進電機驅動芯片構成,A3967是一種內嵌邏輯變換的完全步進電機驅動芯片。
2011-11-28 10:55:144598 
驅動電路,關于步進電機部分,主要針對如何設置步進電機的參數。
2016-03-14 09:52:1920 A3955SB步進電機驅動芯片及其應用。
2016-04-25 10:10:0714 二相步進電機驅動芯片TA8435H及其應用
2016-04-25 10:40:3620 步進電機及其驅動原理
2016-11-18 16:53:4819 基于STM32IPM模塊的三相步進電機SVPWM驅動器
2017-01-12 22:29:5636 2路直流電機驅動模塊正反轉PWM調速+雙H橋步進電機迷你電機
2017-07-21 08:48:0189 本文檔內容介紹了基于靜音步進電機驅動控制芯片TMC5160資料,供參考
2018-02-27 10:35:11117 針對目前氣動微流控芯片控制系統微型化集成化的需求,提出了一種采用步進電機的微流控芯片氣壓驅動系統,通過控制器信號驅動步進電機,使PDMS流道產生了形變從而改變了閥口開度,實現了氣體容腔的壓力控制
2018-03-10 11:07:562 本文首先介紹了步進電機基本原理及用途,其次介紹了步進電機分類,最后介紹了六款步進電機驅動芯片。
2018-05-23 16:20:15107679 本文介紹了步進電機的控制驅動原理和東芝的電機驅動器,以及電機驅動的安全技術。
2018-07-24 08:48:4122835 ?? 七特步進電機驅動器是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的角度一步一步運行
2018-11-21 15:32:401424 為了讓更多的用戶了解步進電機及步進電機驅動器,挑選到最適宜自個運用懇求的步進電機和步進電機驅動器,特將有關選型準則介紹如下
2020-03-29 16:05:006158 本文主要闡述了步進電機驅動器調速方法及步進電機驅動器的作用。
2020-04-20 09:10:2810073 常用步進電機驅動芯片資料說明。
2021-03-18 11:11:2972 NS8A25步進電機驅動器模塊資料分享。
2021-04-14 09:50:2162 什么是電機驅動芯片和電機驅動模塊? 電機驅動芯片是集成有CMOS 控制電路和DMOS 功率器件的芯片,利用它可以與主處理器、電機和增量型編碼器構成一個完整的運動控制系統。可以用來驅動直流電機、步進
2021-07-18 14:46:4415356 步進電機的原理與驅動綜述
2021-08-12 09:47:0117 步進電機不論是在哪方面的應用中功能都是非常關鍵的,都關系到整個產品的運行使用。因此做好電機質量及功能保障非常重要,而就這兩個方面才看,都要求采用好的步進電機驅動芯片,這是很重要的一個要求。 說采用
2021-09-04 10:22:313859 。對步進電動機驅動器的研究幾乎是與步進電動機的研究同步進行的 步進電機驅動器模塊 1、爬山復位 2、自動控制 3、手動微調 4、方向和限位處理 5、邏輯輸出 步進電機驅動器的分類 1.永磁式步進電動機 2.兩相混合式步進電機驅動器 3.三相
2021-10-02 18:10:009034 電機電氣參數、驅動原理基本相同:MCU發脈沖給驅動芯片,電機會根據脈沖數轉動相應的步數。也有將步進電機驅動模塊集成在MCU中的,如飛思卡爾的HY64系列。這種應用中,軟件編程較為簡單,但需要專用的硬件模...
2021-12-06 11:21:0923 步進電機驅動板模塊ULN2003芯片資料包
2021-12-08 09:44:2440 深圳市卓聯微科技有限公司是德國Trinamic中國授權代理商,主要銷售電機(步進、無刷、伺服)控制芯片、電機(步進、無刷、伺服)驅動芯片、電機運動驅控模塊、電機運動控制方案及系統、消費及智能家居
2022-06-12 10:26:279710 
步進電機的應用非常廣泛,在各種設備中經常會遇到,而步進電機的驅動則是使用步進電機必不可少的部分,可以有多種方式來實現步進電機的驅動,在這里我們來考慮一下基于TMC2660驅動芯片的步進電機驅動。
2022-12-14 16:17:504667 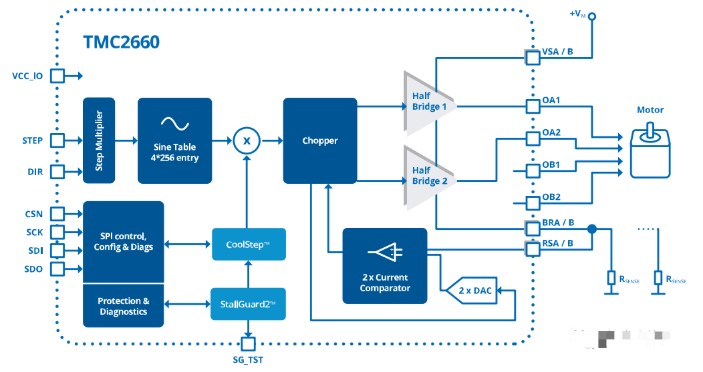
兩相雙極步進電機的驅動:驅動電路,先來看兩相雙極驅動電路的基本框圖示例。可使用雙通道的H橋驅動電路來驅動兩相雙極步進電機。
2023-02-24 09:51:111305 
在上一篇文章“兩相雙極步進電機的驅動 其1”中,給出了兩相雙極步進電機的基本驅動電路示例和驅動波形。此次“兩相雙極步進電機的驅動 其2”篇,將介紹驅動兩相雙極步進電機過程中電流再生時的Decay:電流衰減。
2023-02-24 09:51:111395 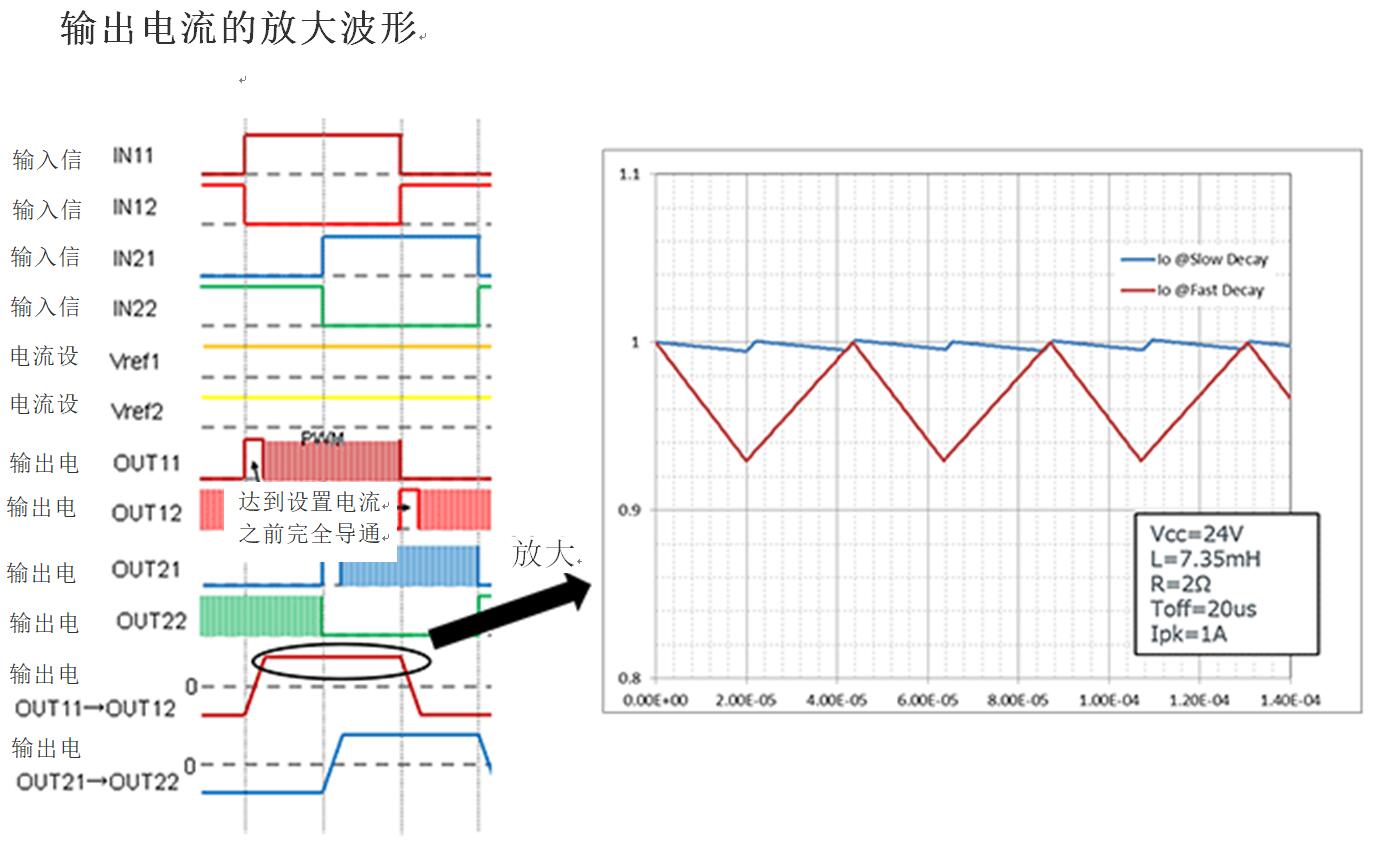
到目前為止,我們已經介紹了步進電機的結構和步進電機的驅動方法。本文在表格中簡要匯總了步進電機的特征及步進電機應用。
2023-02-24 09:51:121006 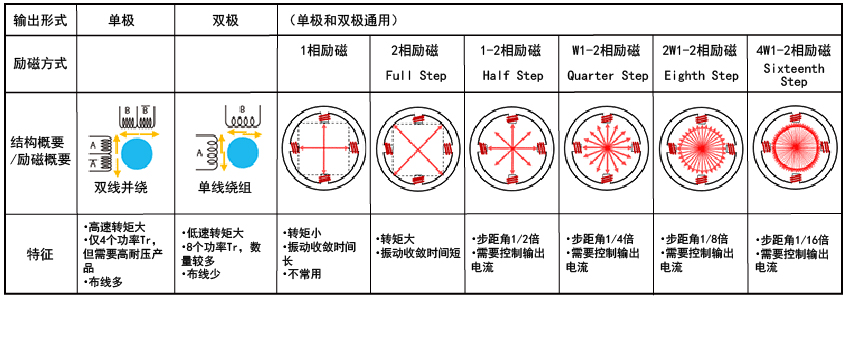
最簡單的步進電機驅動方法是單相雙極驅動方式,也稱為雙相步進驅動方式。該方式只需要使用一個 H橋驅動器和一個脈沖發生器,即可實現步進電機的驅動控制。
2023-03-08 14:21:5612542 步進電機驅動器是一種電子設備,用于控制步進電機的轉動和運動,其主要原理是將控制信號轉換為電機的驅動信號。
2023-03-08 14:30:532613 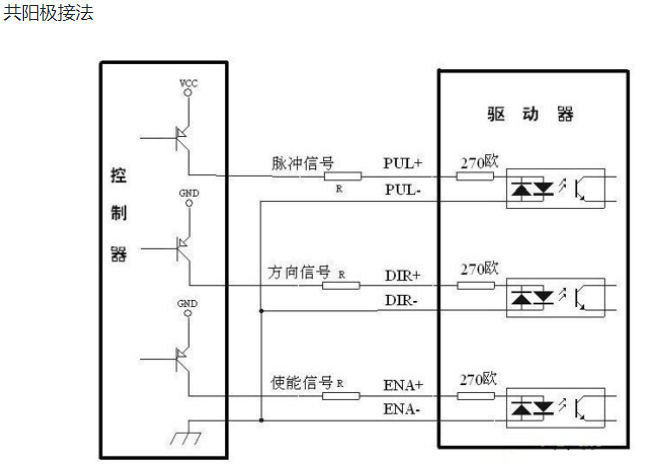
步進電機是一種特殊的電機,可以通過輸入脈沖信號來控制它的位置和運動。步進電機通常由電機本體和驅動電路組成,驅動電路負責將輸入的脈沖信號轉換為電機的運動控制信號。
2023-03-08 14:33:332949 從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅動電路,以及兩相雙極步進電機和兩相單極步進電機的驅動方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:05782 
步進電機驅動器撥碼 步進電機驅動器(step driver)是指一類用于控制步進電機運轉的電子設備,它一般采用撥碼開關來設定步進電機驅動器的參數,以實現對步進電機的控制。 此驅動器采用交流伺服驅動
2023-03-14 14:03:434015 步進電機相比普通直流電機來說模型結構方面更加復雜,比如步進電機沒有設計直流電機用于切換電流方向的換向器,這一設
計致使步進電機轉子無法同直流電機那樣接入直流電源立馬開始運動,這需要我們輪流控制步進電機的多個線圈使磁場旋轉起
來從而驅動電機轉子運動。所以控制步進電機線圈磁場就是所謂的步進電機驅動。
2023-03-16 09:28:416 最近公司使用步進電機控制火車大燈的偏轉方向,因此在網上惡補了下步進電機驅動器相關知識。以下是我的總結,也不一定正確,不過我是我的理解。 看了這么多,電機驅動芯片有3類1. ?TMC5160
2023-03-16 09:28:420 步進電機每輸入一個脈沖信號,轉子就轉動一個角度或前進一步,其輸出的角度輸入的脈沖數成正比,轉速與脈沖頻率成正比。它的驅動方式也比普通的有刷直流電機復雜。 本節我們就來講講步進電機最基礎的驅動方式
2023-03-16 09:28:426 去分析 ,不涉及過多電子方面;5.按照章節,挑選重點,做個筆記; 0.目錄 TMC5160 是…的 步進電機控制驅動芯片 ,將實現自動目標定位的靈活 斜坡發生器 和業界最先進的步進電機驅動器結合在一起。
2023-03-16 10:40:172 步進電機,因為驅動起來相對容易實現,使用步進電機驅動的產品應用也比較廣泛。整步驅動可以用mos管或者達林頓管搭建
H橋控制即可。然而,一般情況下我們都會選擇專用的步進電機驅動集成芯片。使用專用集成
2023-03-16 10:21:555 型號TCM260是德國TRINAMIC公司產的步進電機驅動芯片,綜合性能應該是步進電機驅動芯片中排前列的,當然價格也是。
TMC260程序上兼容TMC2660、TMC262,其中TMC2660
2023-03-17 15:34:122 之前小白白寫過一篇步進電機驅動基礎,講了最基本的步進電機驅動方法: 步進電機驅動基礎_xiaobaibai_2021的博客-CSDN博客_步進電機驅動 這里,接著以前的文章,再講一些步進電機驅動相關
2023-03-20 10:45:5510 四相/四線兩相(兩種型號的步進電機驅動器不能通用,所以購買驅動器之前要確定型號) 2.電機尺寸: 3.重量: 4.帶載能力: 5.驅動電流:行業內步進電機的額定電流都是指電流峰值,實際工作電流不一定是額定電流驅動,42步進電機及以 下尺寸一般小于1A;
2023-03-20 14:22:2711 該模塊為5線4相步進電機,可以使用普通的uln2003芯片驅動。
驅動要求:能夠提供較快的電流上升和下降速度,使電流波形經量接近矩形。提供具有戒指期間釋放電流流通的賄賂,以前降低繞組兩端的反電動勢,加快電流衰減。具有較高的功率及效率,步進
電機的轉速與脈沖信號的頻率姐可以對單機進行調速。
2023-03-20 13:59:280 根據我讀的《步進電機應用技術》這本書,進行的學習過程中的知識記錄和心得體會的記錄。
前言
基本信息
前言說明
三相步進電機的驅動電路
三相電機的驅動方式
三相步進電機用驅動器 I C IC IC
2023-03-20 11:46:356 簡 介: 實驗研究了基于TI公司的DRV8825不僅電機驅動芯片模塊,并利用它與原來存在的X-Y的平臺構建了一個可以自動測量的平臺 。
這款基于TI公司的 DRV8825 步進電機驅動芯片模塊
2023-03-20 11:25:432 本章介紹步進電機的主要驅動方式和控制方法。步進電機性能除了電機本體外,還會根據驅動方式和控制方法不同而受到很大影響。選擇步進電機的時候,同時要著重考慮驅動方式和控制方法。
2023-03-20 10:52:305 本次主要從步進電機的結構、工作原理、電機參數分別介紹,最后通過實驗來實現步進電機運動的
簡單控制。本章所要實現的功能是:通過 ULN2003 驅動模塊控制 28BYJ48 步進電機運行方向及速度
2023-03-21 15:13:161 今天來簡單測試一下用STM32驅動步進電機。
方法是通過STM32控制A4988模塊來驅動步進電機。A4988 是一款帶轉換器和過流保護的 DMOS 微步進電機驅動器,它用于操作雙極步進 電機
2023-03-21 11:02:378 五線四相步進電機驅動測試程序(2個步進電機)
2023-03-22 14:18:406 步進電機按步驅動(pwm)基礎知識準備材料實操接線1.當步進電機的接線標簽缺失時如何分辨AB相2.主板與驅動器連接3.代碼部分重點!后記
基礎知識
1.步進電機的基本知識 [CSDN
2023-03-22 09:57:470 ,為方便觀察,可在輸出軸處黏上一片小紙板。其中紅色線為VCC,其余4個為4個相位。 使用ULN203達林頓驅動芯片驅動步進電機,板載4個LED,可以指示相位狀態。 步進電機相位控制,如果選擇相位A,單片機給驅動板BJ1引腳高電平,其他BJ2/BJ3/BJ4引腳低電平,達林頓管
2023-03-23 10:43:380 步進電機驅動模塊 TMCM-1316“StepRocker伺服”是一個單軸電機控制器/驅動板,用于2相雙極步進電機,包括帶有外部編碼器的閉環操作。它具有由 TMC4361 和 TMC5160 以及
2023-05-08 14:45:20852 TMC2160是一款大功率步進電機驅動芯片,具有SPI接口。它采用了業界最先進的步進電機驅動器與簡單的步進/直接接口。使用外部晶體管,高動態,高扭矩驅動器可以實現。基于Trinamic先進
2023-06-02 10:52:15930 
步進系統=步進驅動器+步進電機。步進電機由步進驅動器來驅動,相當于驅動電源,且它受外部的脈沖信號和方向信號控制(這里舉例是西門子PLC輸出脈沖),進而控制步進電機的旋轉角度和速度。
2023-08-25 11:15:10649 
步進電機驅動器是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,這個固定的角度被稱為“步距角”。步進電機不能直接接到直流或交流電
2023-11-14 08:07:32926 
,還能輕松驅動步進電機。本文將詳細介紹Arduino驅動步進電機的原理、方法和應用。 步進電機基礎知識 1.1 步進電機概述 步進電機是一種將電脈沖信號轉換為機械位移的電動機。與直流電機相比,步進電機具有定位精度高、扭矩大、響應速度快等
2024-01-14 16:37:37671 步進電機驅動器是一種常見的電機驅動裝置,可用于控制步進電機的轉動。調整步進電機驅動器的撥碼開關可以改變其工作模式和參數設置,以滿足不同的應用需求。下面是一個詳細解釋如何調整步進電機驅動器撥碼開關
2024-01-15 13:56:45736 步進電機驅動電路原理是指通過特定的電信號驅動步進電機工作的原理。而步進電機驅動器是將驅動電路封裝成一個整體,便于直接使用和連接的設備。在本文中,我將詳細介紹步進電機驅動電路原理。 一、步進電機驅動
2024-01-24 10:46:14480
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論