相較于激光雷達(dá)SLAM系統(tǒng),視覺(jué)SLAM系統(tǒng)具有不主動(dòng)發(fā)出信號(hào)的優(yōu)點(diǎn)。此外,視覺(jué)是對(duì)環(huán)境的稠密感知,可以利用視覺(jué)特征構(gòu)建出更符合人類(lèi)感知的環(huán)境地圖。
2022-12-21 16:18:09 2451
2451 上周的組會(huì)上,我給研一的萌新們講解什么是SLAM,為了能讓他們?cè)跊](méi)有任何基礎(chǔ)的情況下大致聽(tīng)懂,PPT只能多圖少字沒(méi)公式,這里我就把上周的組會(huì)匯報(bào)總結(jié)一下。 這次匯報(bào)的題目我定為“視覺(jué)SLAM:一直在
2023-08-21 10:02:071570 
控制。當(dāng)下國(guó)內(nèi)有一些AGV企業(yè)都已開(kāi)始將SLAM技術(shù)應(yīng)用到AGV上,借此實(shí)現(xiàn)真正的自然導(dǎo)航。 SLAM的兩大類(lèi)別用在SLAM上的傳感器主要可分為兩大類(lèi),一種是激光雷達(dá),而另一種是攝像頭,為此,業(yè)內(nèi)人士
2018-12-06 10:25:32
題之一,Google、Uber、百度等企業(yè)都在加速研發(fā)無(wú)人駕駛相關(guān)技術(shù),搶占先機(jī)。 隨著城市物聯(lián)網(wǎng)和智能系統(tǒng)的完善,無(wú)人駕駛必是大勢(shì)所趨。無(wú)人駕駛利用激光雷達(dá)傳感器(Velodyne、IBEO等
2020-12-01 14:26:37
玩過(guò)STM32,只不過(guò)限于簡(jiǎn)單的開(kāi)發(fā),了解嵌入式硬件結(jié)構(gòu)。關(guān)于系統(tǒng)的東西沒(méi)怎么接觸過(guò),想系統(tǒng)學(xué)習(xí),希望前輩給點(diǎn)建議,應(yīng)該從什么開(kāi)始。站在你們的角度,我想對(duì)于初學(xué)者會(huì)事半功倍。
2019-08-15 22:47:53
視覺(jué)SLAM——特征點(diǎn)法與直接法對(duì)比以及主流開(kāi)源方案對(duì)比 ORB LSD SVO DSO
2020-06-02 16:56:49
【總結(jié)】視覺(jué)SLAM筆記整理
2020-07-17 14:05:20
在不久之前,設(shè)計(jì)質(zhì)量控制系統(tǒng)的工程師還不得不在若干種檢驗(yàn)選項(xiàng)中做出選擇,沒(méi)有一種完全令人滿(mǎn)意。 這些選項(xiàng)包括昂貴的單用途視覺(jué)系統(tǒng),多陣列低功能光電傳感器,以及易受疲勞和精力不集中影響的人眼檢驗(yàn)
2018-11-01 17:23:42
顏色識(shí)別功能是火星人視覺(jué)傳感器的基本的功能,現(xiàn)有視覺(jué)傳感器顏色識(shí)別距離有限,不適用于多顏色場(chǎng)景。針對(duì)這些問(wèn)題,本傳感器采用改進(jìn)的數(shù)字圖像處理算法,能完成多個(gè)物體顏色識(shí)別,提升準(zhǔn)確率。處理過(guò)程分為三個(gè)
2021-12-17 07:47:04
視覺(jué)傳感技術(shù)是傳感技術(shù)七大類(lèi)中的一個(gè),視覺(jué)傳感器是指通過(guò)對(duì)攝像機(jī)拍攝到的圖像進(jìn)行圖像處理,來(lái)計(jì)算對(duì)象物的特征量(面積、重心、長(zhǎng)度、位置等),并輸出數(shù)據(jù)和判斷結(jié)果的傳感器。視覺(jué)傳感器是整個(gè)機(jī)器視覺(jué)系統(tǒng)
2020-08-05 07:53:42
視覺(jué)傳感技術(shù)是傳感技術(shù)七大類(lèi)中的一個(gè),視覺(jué)傳感器是指通過(guò)對(duì)攝像機(jī)拍攝到的圖像進(jìn)行圖像處理,來(lái)計(jì)算對(duì)象物的特征量(面積、重心、長(zhǎng)度、位置等),并輸出數(shù)據(jù)和判斷結(jié)果的傳感器。視覺(jué)傳感器是整個(gè)機(jī)器視覺(jué)系統(tǒng)
2020-08-12 07:33:53
是激光雷達(dá)+SLAM的定位導(dǎo)航技術(shù)。 SLAM表示在不具備周?chē)h(huán)境信息的前提下,讓移動(dòng)機(jī)器人在運(yùn)動(dòng)過(guò)程中根據(jù)自身攜帶的傳感器和對(duì)周?chē)h(huán)境的感知進(jìn)行自身定位,同時(shí)增量式構(gòu)建周?chē)h(huán)境地圖。SLAM可以提高
2018-11-09 15:59:01
CMOS傳感器在3D視覺(jué)、感測(cè)和度量中的應(yīng)用
2021-02-22 06:20:48
ATK-IMU901 角度傳感器
2023-03-28 13:06:19
版基于 TI MSP432 處理器,并包含有直流電機(jī)、碼盤(pán)以及多種不同類(lèi)型的傳感器,利用該套件可以完成豐富的機(jī)器人應(yīng)用。TI-RSLK 中國(guó)版包含有20個(gè)章節(jié)的完整課程,涵蓋了從電子系統(tǒng)基礎(chǔ)入門(mén)...
2022-02-11 06:42:17
全新的PresencePLUSProTM能夠以超低價(jià)格解決各種視覺(jué)檢測(cè)應(yīng)用難題。此視覺(jué)傳感器生產(chǎn)和組裝產(chǎn)生一些缺陷,這就會(huì)涉及到各種各樣的檢查、測(cè)量和零件識(shí)別應(yīng)用,例如汽車(chē)零配件尺寸檢查和自動(dòng)
2018-10-29 14:56:55
學(xué)習(xí)目標(biāo):初識(shí)Linux系統(tǒng)學(xué)習(xí)內(nèi)容:掌握一些簡(jiǎn)單的Linux語(yǔ)句學(xué)習(xí)時(shí)間:1 周一下午2 周二上午3 周三下午學(xué)習(xí)產(chǎn)出:CSDN 技術(shù)博客 1 篇學(xué)習(xí)內(nèi)容cd:進(jìn)入/:根目錄cd …:返回上一級(jí)
2021-12-22 06:37:21
南京長(zhǎng)期求購(gòu)基恩士視覺(jué)系統(tǒng)、回收基恩士激光傳感器 微信同步 :***扣扣 :3334741838長(zhǎng)期回收基恩士激光位移傳感器,回收基恩士XG-8700視覺(jué)檢測(cè)系統(tǒng) ,回收KEYENCE CA-C5
2020-12-15 10:18:40
`回收傳感器,回收plc模塊,回收基恩士激光傳感器,回收基恩士視覺(jué)系統(tǒng),工業(yè)相機(jī),掃碼器,回收基恩士激光傳感器,視覺(jué)系統(tǒng)回收基恩士激光傳感器,長(zhǎng)期回收基恩士激光位移傳感器,回收基恩士視覺(jué)檢測(cè)系統(tǒng)
2020-12-31 14:48:55
`回收基恩士激光傳感器-高價(jià)回收基恩士視覺(jué)系統(tǒng),回收基恩士激光傳感器,視覺(jué)系統(tǒng)回收基恩士激光傳感器,回收基恩士XG-8700視覺(jué)檢測(cè)系統(tǒng) ,回收KEYENCE CA-C5 基恩士視覺(jué)系統(tǒng)相機(jī)線(xiàn)纜
2021-06-23 10:36:10
相機(jī),回收COGNEX DVT 515 視覺(jué)系統(tǒng)智能相機(jī) ,回收COGNEX 相機(jī)回收COGNEX智能相機(jī),回收,回收工業(yè)視覺(jué)相機(jī),回收COGNEX 康耐視視覺(jué)系統(tǒng),回收康耐視 IN-SIGHT 5110 機(jī)器視覺(jué)傳感器工業(yè)相機(jī)ID碼讀碼器,電話(huà)同步微信156-7438-9966
2021-06-24 09:18:29
、計(jì)算機(jī)、人工智能、傳感器、通訊與網(wǎng)絡(luò)等多個(gè)學(xué)科和領(lǐng)域?yàn)榇恚嵌喾N高新技術(shù)發(fā)展成果的綜合集成,因此,它的發(fā)展與眾多學(xué)科發(fā)展密切相關(guān),代表了高科技發(fā)展的前沿。隨著電子技術(shù)的不斷發(fā)展,人們發(fā)明了各式各樣的具有感知,決策,行...
2021-08-09 09:37:34
嵌入式系統(tǒng)開(kāi)發(fā)與應(yīng)用——基于視覺(jué)的機(jī)器人SLAM入門(mén)實(shí)踐1一、OpenCV的安裝與配置1. 下載OpenCV3.4.1并解壓到ubuntu相應(yīng)目錄上2. 下載安裝依賴(lài)庫(kù)和編譯工具cmake(1)更新
2021-12-16 08:16:12
算法是在PC機(jī)上實(shí)現(xiàn)的。隨著嵌入式微處理器技術(shù)的進(jìn)步,32位ARM處理器系統(tǒng)擁有很高的運(yùn)算速度和很強(qiáng)的信號(hào)處理能力,可以作為視覺(jué)系統(tǒng)的處理器,代替PC機(jī)來(lái)實(shí)現(xiàn)簡(jiǎn)單的視覺(jué)處理算法。下面介紹一種基于ARM和CPLD的嵌入式視覺(jué)系統(tǒng),希望能分享嵌入式視覺(jué)開(kāi)發(fā)過(guò)程中的一些經(jīng)驗(yàn)。
2020-04-29 07:41:43
本帖最后由 龍收購(gòu)西門(mén)子模塊 于 2020-5-9 18:36 編輯
基恩士視覺(jué)系統(tǒng)和傳感器蘇州有回收的嗎回收基恩士視覺(jué)傳感器 收購(gòu)基恩士 西鄉(xiāng)回收基恩士視覺(jué)傳感器 回收基恩士讀碼器 回收基恩
2019-11-13 14:23:03
視覺(jué)傳感器是一種機(jī)器視覺(jué)系統(tǒng),經(jīng)過(guò)專(zhuān)門(mén)設(shè)計(jì),用于在非結(jié)構(gòu)化環(huán)境中執(zhí)行簡(jiǎn)單的存在/缺失檢測(cè),并提供通過(guò)/未通過(guò)結(jié)果。視覺(jué)傳感器將相機(jī)的圖像采集功能與計(jì)算機(jī)的處理能力相結(jié)合,能夠?qū)λ圃斓脑虍a(chǎn)品的位置、質(zhì)量和完整性作出決策。
2020-08-17 06:06:43
,回收基恩士光電開(kāi)關(guān),回收基恩士光柵,回收基恩士激光頭,回收基恩士壓力傳感器,回收基恩士激光傳感器,回收基恩士工業(yè)相機(jī),回收基恩士CCD相機(jī),回收基恩士視覺(jué)系統(tǒng),回收基恩士模塊PLC,回收基恩士流量計(jì),回收基恩士放大器,回收基恩士接近開(kāi)關(guān).。回收熱線(xiàn)***同步微信。`
2021-07-17 13:54:13
,激光傳感器,鏡頭,工業(yè)相機(jī) 回收基恩士視覺(jué)系統(tǒng),激光傳感器,鏡頭,回收KEYENCE基恩士IG-028GT-H12 基恩士讀碼器,傳感器,放大器,工業(yè)相機(jī),控制器,等等,長(zhǎng)期大量求購(gòu)灰點(diǎn)工業(yè)相機(jī)
2021-05-27 10:48:07
很多新手都問(wèn)過(guò)嵌入式系統(tǒng)學(xué)習(xí)方法,好的學(xué)習(xí)方法可以事半功倍,學(xué)習(xí)嵌入式系統(tǒng),掌握了好的學(xué)習(xí)方法,自然可以水到渠成。本篇文章就來(lái)說(shuō)說(shuō)嵌入式系統(tǒng)學(xué)習(xí)方法,新手必看哦! 第一,學(xué)習(xí)基本的裸機(jī)編程 對(duì)于
2021-12-17 06:42:07
嵌入式系統(tǒng)學(xué)習(xí)筆記
2021-10-27 07:43:52
嵌入式Linux操作系統(tǒng)學(xué)習(xí)規(guī)劃,不看肯定后悔
2021-04-28 06:22:32
根據(jù)通用主動(dòng)視覺(jué)系統(tǒng)的設(shè)計(jì)要求,提出了基于DSP的嵌入式主動(dòng)視覺(jué)系統(tǒng)的設(shè)計(jì)方案,并完成系統(tǒng)的軟硬件設(shè)計(jì)。最終實(shí)現(xiàn)的系統(tǒng)具有俯仰和搖擺2個(gè)自由度、支持雙CCD視覺(jué)傳感器和雙傾角傳感器。該系統(tǒng)的硬件分別
2019-08-28 08:00:48
***微信同步QQ 3290789899回收康耐視讀碼器康耐視視覺(jué)傳感器康耐視視覺(jué)讀碼器 康耐視條碼讀碼器康耐視條碼掃描器康耐視工業(yè)視覺(jué)康耐視工業(yè)相機(jī)康耐視視覺(jué)軟件康耐視視覺(jué)系統(tǒng)康耐視傳感器康耐視
2021-06-29 20:44:01
***微信同步QQ 3290789899康耐視讀碼器康耐視視覺(jué)傳感器康耐視視覺(jué)讀碼器 康耐視條碼讀碼器康耐視條碼掃描器康耐視工業(yè)視覺(jué)康耐視工業(yè)相機(jī)康耐視視覺(jué)軟件康耐視視覺(jué)系統(tǒng)康耐視傳感器康耐視相機(jī)康
2021-05-13 21:34:18
大家好,我是電子技術(shù)的初學(xué)者,對(duì)電子技術(shù)非常感興趣,能不能介紹點(diǎn)書(shū),通俗易懂的,能夠系統(tǒng)學(xué)習(xí)電子技術(shù)的,拜托各位了
2009-04-16 14:22:23
`恩施回收基恩士傳感器-恩施回收基恩士視覺(jué)系統(tǒng), 常年高價(jià)回收基恩士視..常年高價(jià)回收基恩士視覺(jué)系統(tǒng),回收基恩士ccd工業(yè)相機(jī),回收可康耐視工業(yè)相機(jī),.keyence基恩士:放大器,光電開(kāi)關(guān),接近開(kāi)關(guān),傳感器,...手機(jī)+微信***`
2020-12-17 14:10:21
大家好,我想學(xué)習(xí)SLAM技術(shù)有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
收基恩士視覺(jué)系統(tǒng),激光傳感器,鏡頭回收KEYENCEIG-028 讀碼器基恩士傳感器 基恩士感應(yīng)器 基恩士控制器基恩士放大器 基恩士溫控器 基恩士計(jì)數(shù)器基恩士光電傳感器 基恩士光纖傳感器基恩士光纖
2021-05-09 09:30:28
智能視覺(jué)傳感器一般由圖像采集單元、圖像處理單元、圖像處理軟件、網(wǎng)絡(luò)通信裝置等構(gòu)成。
2019-10-25 09:11:21
15580500760王姍姍 求購(gòu)基恩士視覺(jué)系統(tǒng),激光傳感器,鏡頭,工業(yè)相機(jī) 回收基恩士視覺(jué)系統(tǒng),激光傳感器,鏡頭,回收KEYENCE基恩士IG-028 GT-H12 基恩士讀碼器,傳感器,放大器
2020-06-30 20:19:47
計(jì)算機(jī)視覺(jué)干貨資料,涉及相機(jī)標(biāo)定、三維重建、立體視覺(jué)、SLAM、深度學(xué)習(xí)、點(diǎn)云后處理、姿態(tài)估計(jì)、多視圖幾何、多傳感器融合等方向【計(jì)算...
2021-07-27 07:51:42
汕頭基恩士傳感器回收-基恩士讀碼器回收-視覺(jué)系統(tǒng)回收, 回收熱線(xiàn)***同步微信。長(zhǎng)期回收視覺(jué)系統(tǒng),讀碼器,掃描槍?zhuān)厥栈魇考す?b class="flag-6" style="color: red">傳感器回收康耐視CCD鏡頭杭州工業(yè)相機(jī)求購(gòu)基恩士讀碼器,大量回收康耐視
2021-08-27 20:52:33
`泉州回收激光傳感器,光纖放大器,視覺(jué)系統(tǒng),回收熱線(xiàn)***同步微信。回收基恩士激光傳感器 光纖放大器工業(yè)相機(jī),回收KEYNCE基恩士光電傳感器光纖放大器,控制器回收LR-TB5000C基恩士
2021-07-17 14:18:09
電話(huà)+微信:158 0743 3878回收康耐視視覺(jué)相機(jī)高價(jià)回收全新基恩士GT系列激光傳感器回收拆機(jī)傳感器二手鏡頭回收光電開(kāi)關(guān): PQ-01,回收KEYENCE KV-8EX 傳感器主要經(jīng)營(yíng):回收
2021-10-09 12:15:42
深圳求購(gòu)康耐視讀碼器視覺(jué)傳感器回收價(jià)格好***康耐視讀碼器康耐視視覺(jué)傳感器康耐視視覺(jué)讀碼器 康耐視條碼讀碼器康耐視條碼掃描器康耐視工業(yè)視覺(jué)康耐視工業(yè)相機(jī)康耐視視覺(jué)軟件康耐視視覺(jué)系統(tǒng)康耐視傳感器康耐視
2020-10-13 15:13:58
機(jī)器人定位導(dǎo)航中,目前主要涉及到激光SLAM與視覺(jué)SLAM,激光SLAM在理論、技術(shù)和產(chǎn)品落地上都較為成熟,因而成為現(xiàn)下最為主流的定位導(dǎo)航方式,在家用掃地機(jī)器人及商用送餐機(jī)器人等服務(wù)機(jī)器人中普遍采用了...
2021-07-05 06:41:57
SLAM(同步定位與地圖構(gòu)建),是指運(yùn)動(dòng)物體根據(jù)傳感器的信息,一邊計(jì)算自身位置,一邊構(gòu)建環(huán)境地圖的過(guò)程,解決機(jī)器人等在未知環(huán)境下運(yùn)動(dòng)時(shí)的定位與地圖構(gòu)建問(wèn)題。目前,SLAM 的主要應(yīng)用于機(jī)器人、無(wú)人機(jī)、無(wú)人駕駛、AR、VR 等領(lǐng)域。其用途包括傳感器自身的定位,以及后續(xù)的路徑規(guī)劃、運(yùn)動(dòng)性能、場(chǎng)景理解。
2020-05-20 08:19:40
什么是激光SLAM?視覺(jué)VSLAM又是什么?激光SLAM和視覺(jué)VSLAM有哪些不同之處?
2021-11-10 07:16:02
視覺(jué)系統(tǒng),激光傳感器,鏡頭,工業(yè)相機(jī) 回收基恩士視覺(jué)系統(tǒng),激光傳感器,鏡頭,回收KEYENCE基恩士IG-028GT-H12 基恩士讀碼器,傳感器,放大器,工業(yè)相機(jī),控制器,等等,長(zhǎng)期大量求購(gòu)灰點(diǎn)工業(yè)相機(jī)
2021-08-06 11:24:39
地圖上看誤差較大,SLAM 3.0也可靈活對(duì)已產(chǎn)生的地圖進(jìn)行調(diào)整。 即: SLAM 3.0閉環(huán)修正 | 支持多傳感器融合 · 除激光雷達(dá)外,SLAM 3.0軟件技術(shù)同時(shí)支持深度視覺(jué)
2019-01-21 10:57:46
請(qǐng)問(wèn)如何理解SLAM用到的傳感器輪式里程計(jì)IMU、雷達(dá)、相機(jī)的工作原理?
2021-10-09 08:52:46
視覺(jué)傳感器是一種機(jī)器視覺(jué)系統(tǒng),經(jīng)過(guò)專(zhuān)門(mén)設(shè)計(jì),用于在非結(jié)構(gòu)化環(huán)境中執(zhí)行簡(jiǎn)單的存在/缺失檢測(cè),并提供通過(guò)/未通過(guò)結(jié)果。視覺(jué)傳感器將相機(jī)的圖像采集功能與計(jì)算機(jī)的處理能力相結(jié)合,能夠?qū)λ圃斓脑虍a(chǎn)品
2018-11-06 11:02:19
1 引言視覺(jué)檢測(cè)技術(shù)是以機(jī)器視覺(jué)為基礎(chǔ)的新型測(cè)試技術(shù),因其具有測(cè)量非接觸、速度快、信息量大、應(yīng)用領(lǐng)域?qū)拸V等特點(diǎn)而受到歡迎。結(jié)構(gòu)光傳感器是應(yīng)用較早、發(fā)展較成熟的視覺(jué)傳感器,因此本系統(tǒng)采用結(jié)構(gòu)光傳感器來(lái)
2019-07-05 06:22:19
視覺(jué)系統(tǒng),激光傳感器,鏡頭,工業(yè)相機(jī) 回收基恩士視覺(jué)系統(tǒng),激光傳感器,鏡頭,回收KEYENCE基恩士IG-028GT-H12 基恩士讀碼器,傳感器,放大器,工業(yè)相機(jī),控制器,等等,長(zhǎng)期大量求購(gòu)灰點(diǎn)工業(yè)相機(jī)
2021-08-06 11:17:43
隨州回收基恩士各個(gè)系列傳感器 視覺(jué)系統(tǒng) 光電開(kāi)關(guān)回收基恩士視覺(jué)系統(tǒng),回收基恩士工業(yè)相機(jī),回收基恩士渦流位移傳感器控制器回收基恩士激光位移傳感器回收基恩士KEYENCE 激光位移傳感器頭回收基恩士
2020-10-15 16:41:24
實(shí)現(xiàn)單目視覺(jué)同時(shí)定位與建圖(SLAM)仿真系統(tǒng),描述其設(shè)計(jì)過(guò)程。該系統(tǒng)工作性能良好,其SLAM算法可擴(kuò)展性強(qiáng),可以精確逼近真實(shí)單目視覺(jué)SLAM過(guò)程。以方便SLAM算法的研究為目標(biāo),提
2009-04-15 08:50:37 82
82 視覺(jué)系統(tǒng)與視覺(jué)傳感器之比較
視覺(jué)傳感器迎來(lái)快速發(fā)展
在不久之前,設(shè)計(jì)質(zhì)量控制系統(tǒng)的工程師還不得不在若干種檢測(cè)選項(xiàng)中
2009-11-07 11:45:121833 基于圖像傳感器的CPLD視覺(jué)系統(tǒng)設(shè)計(jì)
目前,關(guān)于視覺(jué)系統(tǒng)的研究已經(jīng)成為熱點(diǎn),也有開(kāi)發(fā)出的系統(tǒng)可供參考。但這
2009-11-07 11:51:39603 視覺(jué)傳感器,視覺(jué)傳感器是什么意思
視覺(jué)傳感器概要
2010-03-03 15:08:332530 為什么視覺(jué)傳感會(huì)成為工業(yè)傳感器市場(chǎng)中增長(zhǎng)最快的領(lǐng)域? 視覺(jué)傳感器的原理是從一整幅圖像捕獲光線(xiàn)的數(shù)以千計(jì)的像素。圖像的清晰和細(xì)膩程度通常用分辨率來(lái)衡量,以像素?cái)?shù)量表示。上海貝特威提供的部分視覺(jué)傳感器能夠捕獲30萬(wàn)像素,視覺(jué)系統(tǒng)能達(dá)到200萬(wàn)像素。因
2011-01-28 03:04:50102 本文研究了基于多傳感器組合導(dǎo)航方法的SLAM,由于移動(dòng)機(jī)器人無(wú)法通過(guò)單個(gè)傳感器得到可靠的信息,采用多傳感器組合導(dǎo)航的方法可以很好的解決這個(gè)問(wèn)題。本文用單個(gè)CCD攝像頭和里程
2011-11-04 16:53:0091 針對(duì)同步定位與地圖構(gòu)建SLAM(Simultaneous Localization and Mapping)算法中,單個(gè)傳感器提供的信息受到傳感器本身特性和周?chē)h(huán)境制約的局限性,提出了在僅聲納更新的SLAM算法同時(shí),引入航向
2013-09-25 16:08:4048 電子發(fā)燒友網(wǎng)站提供《信號(hào)與系統(tǒng)學(xué)習(xí)指導(dǎo)及習(xí)題精解+陳后金+第2版.txt》資料免費(fèi)下載
2014-01-13 15:05:320 ABB_DCS系統(tǒng)學(xué)習(xí)資料 。 .
2015-11-18 10:24:050 [學(xué)習(xí)嵌入式]嵌入式系統(tǒng)學(xué)習(xí)方法,輕松入門(mén)嵌入式。
2016-03-28 15:29:2179 的位置精度越差。 視覺(jué)傳感器是整個(gè)機(jī)器視覺(jué)系統(tǒng)信息的直接來(lái)源,主要由一個(gè)或者兩個(gè)圖形傳感器組成,有時(shí)還要配以光投射器及其他輔助設(shè)備。視覺(jué)傳感器的主要功能是獲取足夠的機(jī)器視覺(jué)系統(tǒng)要處理的最原始圖像。 經(jīng)濟(jì)性視覺(jué)傳
2017-09-26 11:17:3314 當(dāng)我們談?wù)?b class="flag-6" style="color: red">SLAM時(shí),最先問(wèn)到的就是傳感器。SLAM的實(shí)現(xiàn)方式與難度和傳感器的形式與安裝方式密切相關(guān)。傳感器分為激光和視覺(jué)兩大類(lèi),視覺(jué)下面又分三小方向。下面就帶你認(rèn)識(shí)這個(gè)龐大家族中每個(gè)成員的特性。
2018-01-09 13:09:0223852 本文開(kāi)始介紹了什么是視覺(jué)傳感器與視覺(jué)傳感器的基本原理,其次介紹了視覺(jué)傳感器構(gòu)成,最后介紹了視覺(jué)傳感器必須具備的五大特征及應(yīng)用領(lǐng)域。
2018-03-01 09:57:4610817 高仙的SLAM2.0技術(shù)體系核心,是基于多傳感器融合+深度學(xué)習(xí)的架構(gòu),即語(yǔ)義SLAM。高仙SLAM2.0技術(shù)方案以語(yǔ)義分析、機(jī)器學(xué)習(xí)為基礎(chǔ),結(jié)合云端實(shí)時(shí)信息處理以及專(zhuān)為多傳感器融合而開(kāi)發(fā)的專(zhuān)業(yè)算法體系,真正實(shí)現(xiàn)了SLAM在建圖和導(dǎo)航兩個(gè)環(huán)節(jié)的完整應(yīng)用。
2018-05-15 16:48:308534 隨著傳感器種類(lèi)和安裝方式的不同,SLAM的實(shí)現(xiàn)方式和難度會(huì)有很大差異。按傳感器來(lái)分,SLAM主要分為激光、視覺(jué)兩大類(lèi)。其中,激光SLAM研究較早,理論和工程均比較成熟。視覺(jué)方案目前大部分實(shí)驗(yàn)室研究
2019-05-12 10:31:134896 近年來(lái)SLAM系統(tǒng)與其他傳感器的融合成為了一大熱點(diǎn)。
2019-05-24 09:45:0612480 技術(shù)不同,只需一個(gè)3D視覺(jué)攝像頭,就可以做到這一點(diǎn)。通過(guò)跟蹤攝像頭視頻幀中足夠數(shù)量的關(guān)鍵點(diǎn),可以快速了解傳感器的方向和周?chē)锢憝h(huán)境的結(jié)構(gòu)。所有視覺(jué)SLAM系統(tǒng)都在不斷的工作,以使重新投影誤差
2019-08-09 17:31:201430 技術(shù)不同,只需一個(gè)3D視覺(jué)攝像頭,就可以做到這一點(diǎn)。通過(guò)跟蹤攝像頭視頻幀中足夠數(shù)量的關(guān)鍵點(diǎn),可以快速了解傳感器的方向和周?chē)锢憝h(huán)境的結(jié)構(gòu)。所有視覺(jué)SLAM系統(tǒng)都在不斷的工作,以使重新投影誤差
2019-09-11 22:01:351759 ,就相當(dāng)于人類(lèi)失去了雙眼一樣。 一、什么是視覺(jué)SLAM? SLAM的英文全稱(chēng)是Simultaneous Localization and Mapping,中文稱(chēng)作「即時(shí)定位與地圖創(chuàng)建」,而視覺(jué)SLAM就是用攝像頭來(lái)完成環(huán)境的感知工作。 舉個(gè)例子,當(dāng)你第一天去上大學(xué)的時(shí)候,為了迅速熟悉校園環(huán)境并且找到
2020-04-17 09:21:4153842 在業(yè)內(nèi),視覺(jué)SLAM與激光SLAM誰(shuí)更勝一籌,誰(shuí)將成為未來(lái)主流趨勢(shì)這一問(wèn)題,成為大家關(guān)注的熱點(diǎn),不同的人也有不同的看法及見(jiàn)解,以下將從成本、應(yīng)用場(chǎng)景、地圖精度、易用性幾個(gè)方面來(lái)進(jìn)行詳細(xì)闡述。
2020-08-28 14:53:3016068 
當(dāng)我們談?wù)?b class="flag-6" style="color: red">SLAM時(shí),最先問(wèn)到的就是傳感器。SLAM的實(shí)現(xiàn)方式與難度和傳感器的形式與安裝方式密切相關(guān)。傳感器分為激光和視覺(jué)兩大類(lèi),視覺(jué)下面又分三小方向。
2020-12-26 00:25:302033 SLAM 是 Simultaneous Localization and Mapping 的縮寫(xiě),中文譯作“同時(shí)定位與地圖構(gòu)建”。它是指搭載特定傳感器的主體,在沒(méi)有環(huán)境先驗(yàn)信息的情況下,于運(yùn)動(dòng)過(guò)程中建立環(huán)境的模型,同時(shí)估計(jì)自己的運(yùn)動(dòng)。如果這里的傳感器主要為相機(jī),那就稱(chēng)為“視覺(jué) SLAM”。
2021-03-20 09:13:123814 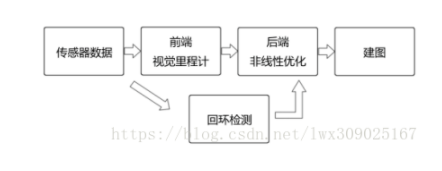
的位置精度越差。 如何選擇視覺(jué)傳感器 傳感器的選擇取決于準(zhǔn)確性、輸出、靈敏度、機(jī)器視覺(jué)系統(tǒng)的成本以及對(duì)應(yīng)用要求的充分理解。對(duì)傳感器主要性能的基本理解能夠幫助開(kāi)發(fā)人員迅速縮小他們的查找范圍,找到合適的傳感器。 三個(gè)
2021-10-02 18:13:009007 嵌入式操作系統(tǒng)學(xué)習(xí)筆記
2021-10-20 13:51:083 嵌入式系統(tǒng)學(xué)習(xí)筆記https://app.yinxiang.com/fx/97dd59b5-21f1-470c-969c-d3509ee38fce
2021-10-20 19:50:590 視覺(jué)系統(tǒng)信息的直接來(lái)源,主要由一個(gè)或者兩個(gè)圖形傳感器組成,有時(shí)還要配以光投射器及其他輔助設(shè)備。視覺(jué)傳感器的主要功能是獲取足夠的機(jī)器視覺(jué)系統(tǒng)要處理的最原始圖像。
2022-10-09 16:44:082440 視覺(jué)SLAM是一種基于視覺(jué)傳感器的 SLAM 系統(tǒng),與激光傳感器相比,視覺(jué)傳感器具有成本低、保留環(huán)境語(yǔ)義信息的優(yōu)點(diǎn),能夠與深度學(xué)習(xí)進(jìn)行大量結(jié)合。
2022-11-02 15:02:32746 一個(gè)建立在兩個(gè)基于直接法的緊耦合的完整的激光視覺(jué)慣導(dǎo)融合的slam框架;
2022-11-09 09:55:541147 SLAM本質(zhì)上是一個(gè)狀態(tài)估計(jì)問(wèn)題,根據(jù)傳感器做劃分,主要是激光、視覺(jué)兩大類(lèi)。激光SLAM的研究在理論和工程上都比較成熟,現(xiàn)有的很多行業(yè)已經(jīng)開(kāi)始使用激光SLAM完成工業(yè)工作;而視覺(jué)SLAM
2022-12-02 15:00:281149 SLAM 是 Simultaneous Localization and Mapping 的縮寫(xiě),中文譯作“同時(shí)定位與地圖構(gòu)建”。它是指搭載特定傳感器的主體,在沒(méi)有環(huán)境先驗(yàn)信息的情況下,于運(yùn)動(dòng)過(guò)程中建立環(huán)境的模型,同時(shí)估計(jì)自己的運(yùn)動(dòng)。如果這里的傳感器主要為相機(jī),那就稱(chēng)為“視覺(jué) SLAM”。
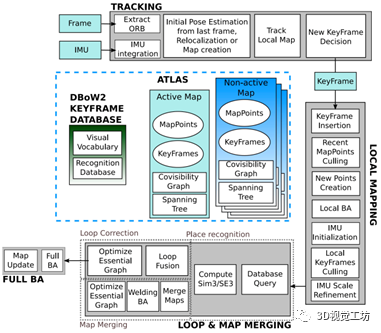
2022-12-05 10:16:311247 視覺(jué)里程計(jì)最近幾年越來(lái)越受到學(xué)術(shù)界以及工業(yè)界的認(rèn)可,以O(shè)RB和VINS為代表的視覺(jué)SLAM已經(jīng)可以滿(mǎn)足絕大多數(shù)場(chǎng)景,而OV2SLAM在其他VSLAM中脫穎而出,其實(shí)時(shí)性以及具體的回環(huán)性能在測(cè)試中都得到了認(rèn)可。
2023-03-21 17:16:31765 用在SLAM上的傳感器主要可分為兩大類(lèi),一種是激光雷達(dá),而另一種是攝像頭,為此,業(yè)內(nèi)人士也將SLAM分為激光SLAM和視覺(jué)SLAM。激光SLAM比視覺(jué)SLAM起步早,在理論、技術(shù)和產(chǎn)品落地上都相對(duì)成熟。
2022-02-15 19:15:241849 
SLAM至今已歷經(jīng)三十多年的研究,這里給出經(jīng)典視覺(jué)SLAM框架,這個(gè)框架本身及其包含的算法已經(jīng)基本定型,并且已經(jīng)在許多視覺(jué)程序庫(kù)和機(jī)器人程序庫(kù)中提供。
2023-08-10 14:15:53410 
近年來(lái),SLAM技術(shù)取得了驚人的發(fā)展,領(lǐng)先一步的激光SLAM已成熟的應(yīng)用于各大場(chǎng)景中,視覺(jué)SLAM雖在落地應(yīng)用上不及激光SLAM,但也是目前研究的一大熱點(diǎn),今天我們就來(lái)詳細(xì)聊聊視覺(jué)SLAM的那些事兒。
2023-09-05 09:31:111375 
目前,機(jī)器視覺(jué)傳感器在當(dāng)代的應(yīng)用可謂是越來(lái)越廣泛,如何選擇機(jī)器視覺(jué)傳感器是值得我們好好學(xué)習(xí)的,現(xiàn)在我們就深入了解如何選擇機(jī)器視覺(jué)傳感器。相機(jī)是機(jī)器視覺(jué)系統(tǒng)的眼睛,而相機(jī)的心臟是圖像傳感器。傳感器
2023-09-25 08:09:02484 
視覺(jué)傳感器的視覺(jué)檢測(cè)系統(tǒng)提供基于圖像的自動(dòng)化檢測(cè),方便進(jìn)行各種工業(yè)和制造應(yīng)用。雖然2D和3D視覺(jué)傳感器不是一項(xiàng)新技術(shù),但現(xiàn)在通常用于自動(dòng)檢測(cè)、機(jī)器人引導(dǎo)、質(zhì)量控制和分揀等。這些智能檢測(cè)系統(tǒng)
2024-01-09 08:36:38195
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論