基于Dubins路徑的無人艇運動規(guī)劃算法
大小:0.71 MB 人氣: 2017-11-30 需要積分:1
標(biāo)簽:路徑規(guī)劃(15294)Dubins(1902)
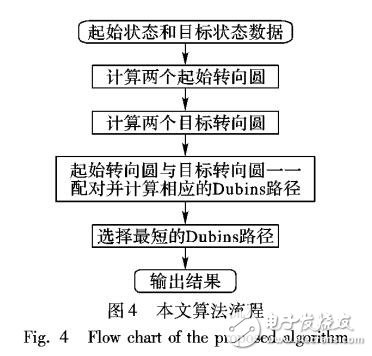
針對無人艇運動規(guī)劃問題,通過Dubins路徑的理論分析,提出一種利用純粹幾何方法的Dubins路徑計算方法。該方法中沒有出現(xiàn)解方程組的運算,而是首先根據(jù)無人艇運動狀態(tài)計算轉(zhuǎn)向圓,然后利用幾何方法計算轉(zhuǎn)向圓間的公切線,最后通過公切線連接得到Dubins路徑。通過5組仿真實驗驗證了所提方法的有效性。前4組仿真實驗分別設(shè)計了計算Dubins路徑過程中可能出現(xiàn)的各種情形,以驗證算法適用于多種情況的Dubins路徑計算。最后一組仿真實驗用于無人艇的路徑規(guī)劃及運動狀態(tài)調(diào)整,仿真結(jié)果表明,基于Dubins路徑的無人艇運動規(guī)劃算法是可行的。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%