 關于自主泊車系統的分析和介紹
關于自主泊車系統的分析和介紹

項目介紹:
自主泊車系統方案來自英飛凌汽車電子產業化合作伙伴。自動泊車系統可以使汽車自動地以正確的停靠泊車位,該系統包括環境數據采集系統、中央處理器和車輛策略控制系統,所述的環境數據采集系統包括圖像采集系統和車載距離探測系統,可采集圖像數據及周圍物體距車身的距離數據,并通過數據線傳輸給中央處理器;中央處理器采用英飛凌 SAK-XC2336B-40F80L AA,將采集到的數據分析處理后,得出汽車的當前位置、目標位置以及周圍的環境參數,依據上述參數做出自動泊車策略,并將其轉換成電信號;車輛策略控制系統接受電信號后,依據指令做出汽車的行駛如角度、方向及動力支援方面的操控。本項目將在已經開發出的原理樣機的基礎上,結合產品樣機的要求,進行系統的可靠性研究、匹配性試驗以及生產工藝的優化,以改進系統的穩定性和可靠性,降低成本,滿足產品的使用性能。結構組成如下圖所示。

性能指標:
泊車最大行駛速度 10Km/h
在目標停車位置上與其他兩輛相鄰汽車的平行距離 30cm
最小停車位長度 1.5倍車身長度
正常工作溫度:-40~85℃;
存儲溫度:-40~125℃;
ECU通過相關環境、機械試驗,具有過流、過電壓、短路等常規保護功能;
ECU符合EMC要求;
產品圖片:
英飛凌戰略商務項目部負責亞太區產業化合作伙伴網絡及生態圈的運作。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
自動泊車
+關注
關注
0文章
105瀏覽量
14038 -
中央處理器
+關注
關注
1文章
126瀏覽量
16858
發布評論請先 登錄
相關推薦
熱點推薦
HY-M8&M16 動態信號測試分析系統介紹
HY-M8&M16動態信號測試分析系統介紹
HY-M8/16是一款西安環測自動化技術有限公司高性能數據采集分析的動態信號測試分析
發表于 06-25 11:41
基于車車通信和自主感知的列車自主運行控制系統在寧波8號線測試驗證成功
? ? ? 2025年1月,中車時代電氣在寧波地鐵8號線現場進行了基于車車通信和自主感知的列車自主運行控制系統(以下簡稱“TACS2.0系統)的測試試驗。 中車時代電氣 基于車車通信和
華為乾崑智駕泊車代駕VPD全球首個機場商用試點發布
近日,深圳機場自主泊車代駕啟動測試發布儀式暨自主泊車規模化應用技術研討會隆重舉行。本次是華為乾崑智駕泊車代駕VPD(ValetParking
華為乾崑VPD泊車代駕深圳機場商用試點發布
近日,深圳機場自主泊車代駕啟動測試發布儀式暨自主泊車規模化應用技術研討會隆重舉行。此次活動標志著華為乾崑智駕泊車代駕VPD(Valet Pa
智能泊車輔助系統中的AK2超聲波雷達與elmos芯片
Elmos芯片在AK2超聲波雷達中應用,可見其在智能泊車輔助系統中發揮著重要的作用,它們不僅提供了精確的距離測量功能,還通過軟件可配置參數提高了系統的靈活性和適應性。這些芯片的高集成度、抗干擾性

端到端在自動泊車的應用
與城市環境的復雜性和高速公路駕駛的風險相比,停車場景的特點是低速、空間有限和高可控性。這些特點為在車輛中逐步部署端到端自動駕駛能力提供了可行的途徑。最重要的是自動泊車對時間不敏感,而自動駕駛幀率至少

智駕仿真測試實戰之自動泊車HiL仿真測試
汽車進入智能化時代,自動泊車功能已成為標配。在研發測試階段,實車測試面臨測試場景覆蓋度不足、效率低下和成本高昂等挑戰。為解決這些問題,本文提出一種自動泊車HiL仿真測試系統方案,可大幅度提升測試效率

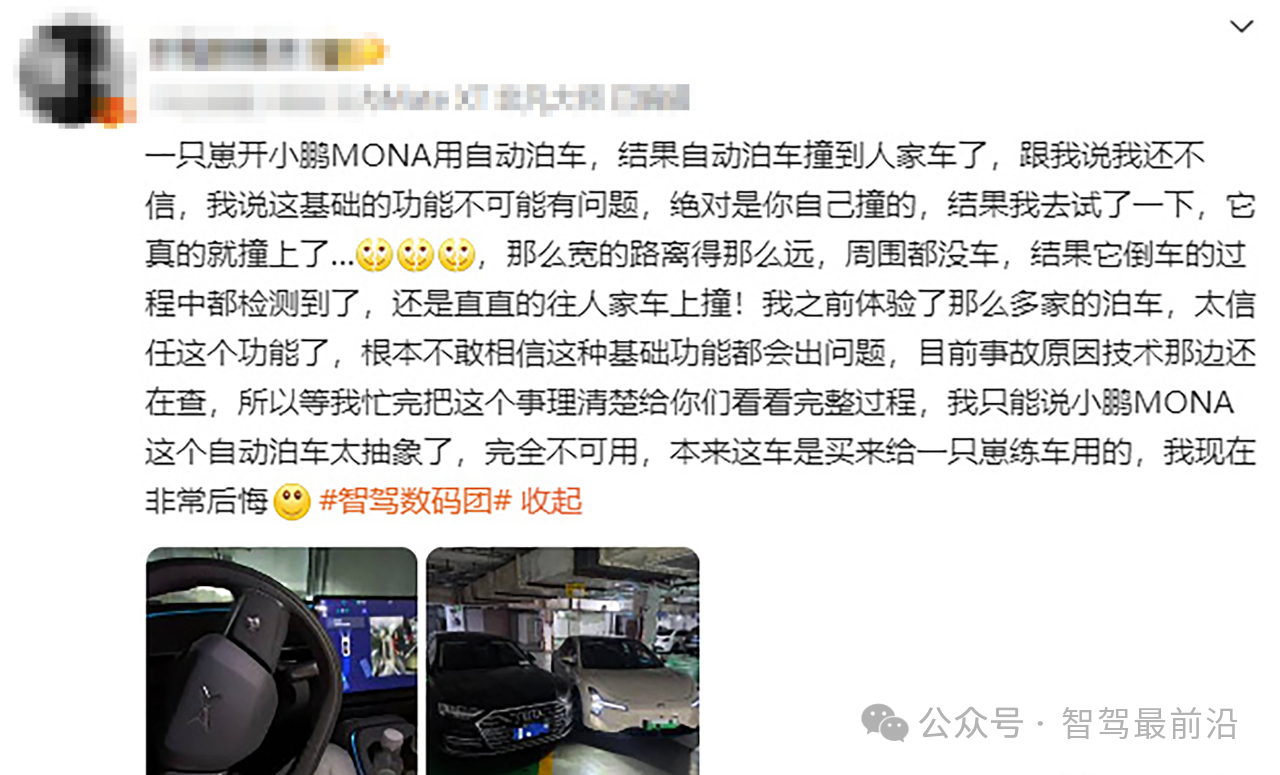
從小鵬M03自動泊車撞上奧迪聊聊智駕現狀
的自動泊車功能,太信任這個功能了,根本不相信這種基礎功能還會出問題。 ? 此事在網絡發酵后,獲得了眾多網友的熱烈討論,對此小鵬汽車相關負責人回應媒體稱:公司售后同學已經聯系上客戶,在積極處理解決中。關于自動泊車狀態下發生
宏景智駕自動泊車2.0系統征服高難度車位
隨著自動泊車技術(APA)的進步以及裝車成本的降低,該功能已經實現在多種場景下的落地,有效解決了用戶泊車難問題。近年來,各大主機廠加大對自動泊車系統的投入力度,紛紛推出搭載自動
超聲波雷達在APA自動泊車功能中的應用與仿真
自動泊車輔助系統(APA)是現代汽車智能駕駛技術的重要組成部分,該系統使得車輛能夠在沒有任何人為干預的情況下,自動完成泊車過程。具體來說,APA系統





 工商網監
工商網監
評論