 超聲波雷達在APA自動泊車功能中的應用與仿真
超聲波雷達在APA自動泊車功能中的應用與仿真
作者 | 七七沫沫
小編 | 不吃豬頭肉
自動泊車輔助系統(APA)是現代汽車智能駕駛技術的重要組成部分,該系統使得車輛能夠在沒有任何人為干預的情況下,自動完成泊車過程。具體來說,APA系統在泊車過程中通過布置在車輛周圍的傳感器(環視攝像頭、超聲波雷達等)完成對有效車位以及障礙物的感知識別,再進行泊車路徑的規劃、車輛運動的控制,從而完成泊車的工作。本文將重點介紹超聲波雷達在APA自動泊車功能中的應用以及HiL測試環境中的仿真方法。 APA自動泊車中超聲波雷達的應用
APA自動泊車中超聲波雷達的應用
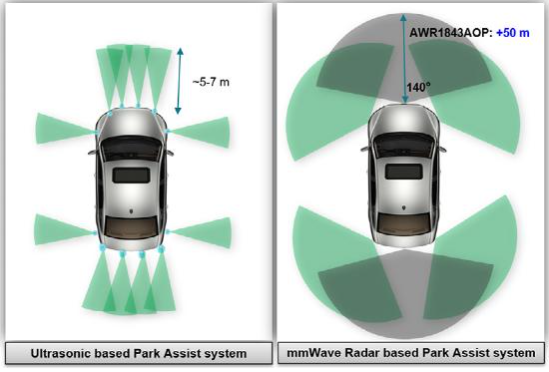
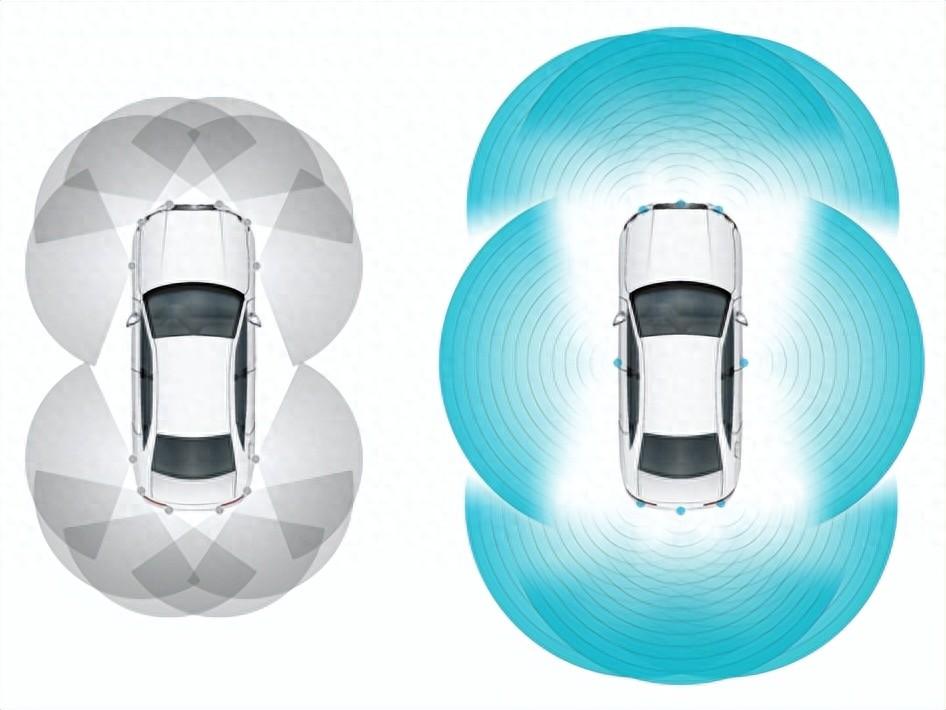
在自動泊車的應用場景中,一般需要在車輛周圍布置12顆超聲波雷達以完成全自動泊車的功能。相比于毫米波雷達或其他形式的雷達,超聲波雷達具備制造成本低、安裝方便、后期易維護等諸多優點。
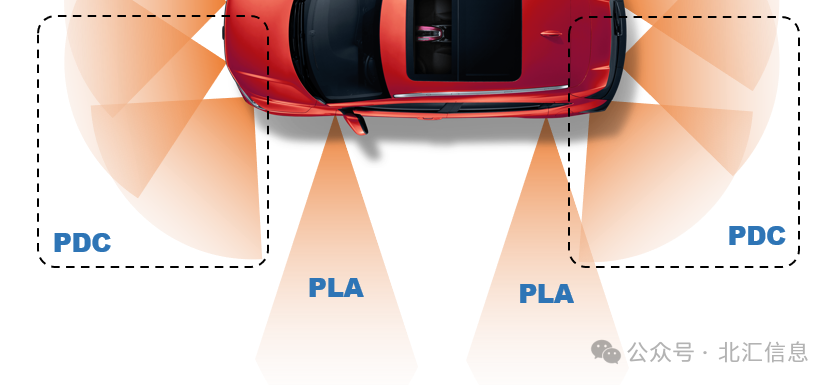
超聲波雷達主要分為兩種類型,一種是安裝在前后保險杠用于檢測障礙物的短距雷達,探測距離一般為15~250cm,這類傳感器被稱為PDC傳感器。另一種安裝在車輛側面,用于探測停車位長度的傳感器,探測距離一般為30~500cm,這類傳感器被稱為PLA傳感器 。PDC和PLA主要的分布如下圖所示。
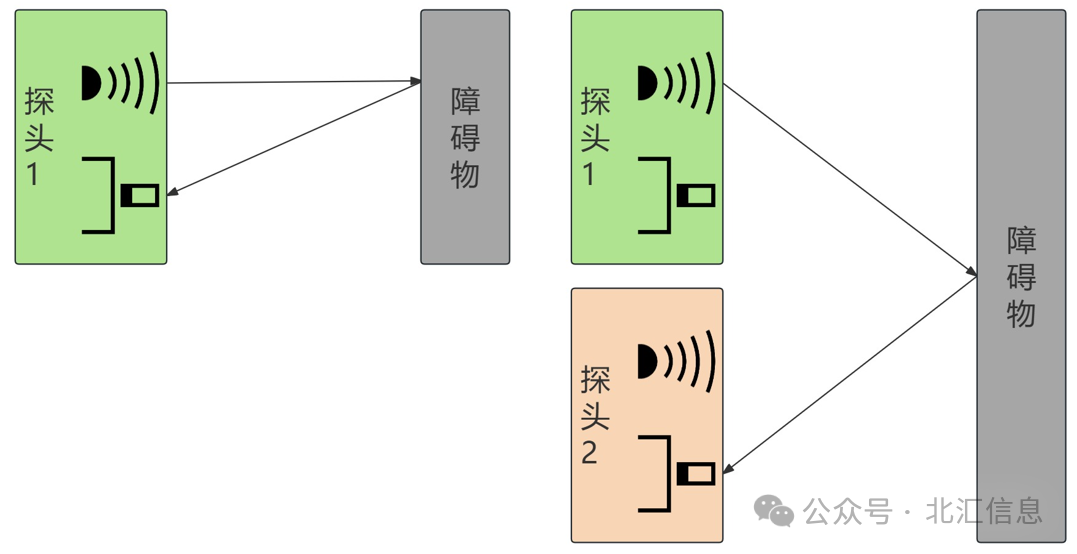
在實際的自動泊車應用場景中,超聲波擁有多種工作模式,如自發自收(Direct Echoes)模式以及復雜的多發多收(Cross Echoes)工作模式。在自發自收的工作模式中,超聲波雷達通過聲波的飛行時間(TOF)即可計算車輛與障礙物之間的距離,這種模式原理相對簡單,但不能獲得障礙物的二維坐標,即無法獲取障礙物相對于主車的空間位置。而多發多收的工作模式通過將多個超聲波雷達作為聲波的接收器,可以更好地獲取障礙物相對于主車的空間位置,但是計算也將更為復雜。

超聲波雷達測距原理及APA泊車流程
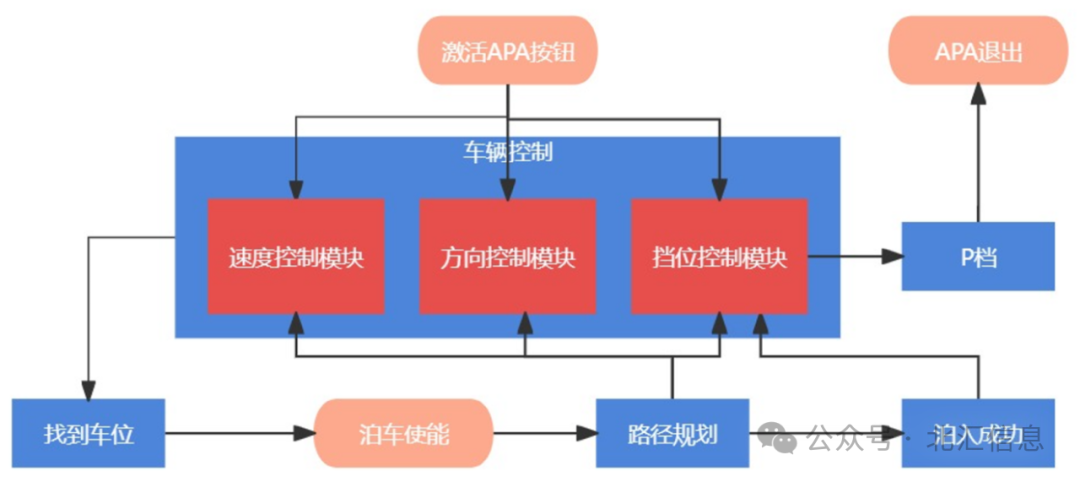
在車輛進行泊車時,超聲波雷達可實時計算并輸出車輛與周圍障礙物的距離。控制器軟件通過對超聲波數據處理擬合出周圍障礙物的輪廓、形狀,相對位置等。以水平車位的泊車場景舉例,駕駛員激活車輛APA自動泊車功能,車輛保持低速前進,結合超聲波的感知融合數據,APA系統將識別可泊入的車位,駕駛員使能后,車輛將進入下一步路徑規劃、車輛控制等必要環節直到車輛泊入車位成功并退出APA自動泊車功能,如下圖為整個APA自動泊車流程。

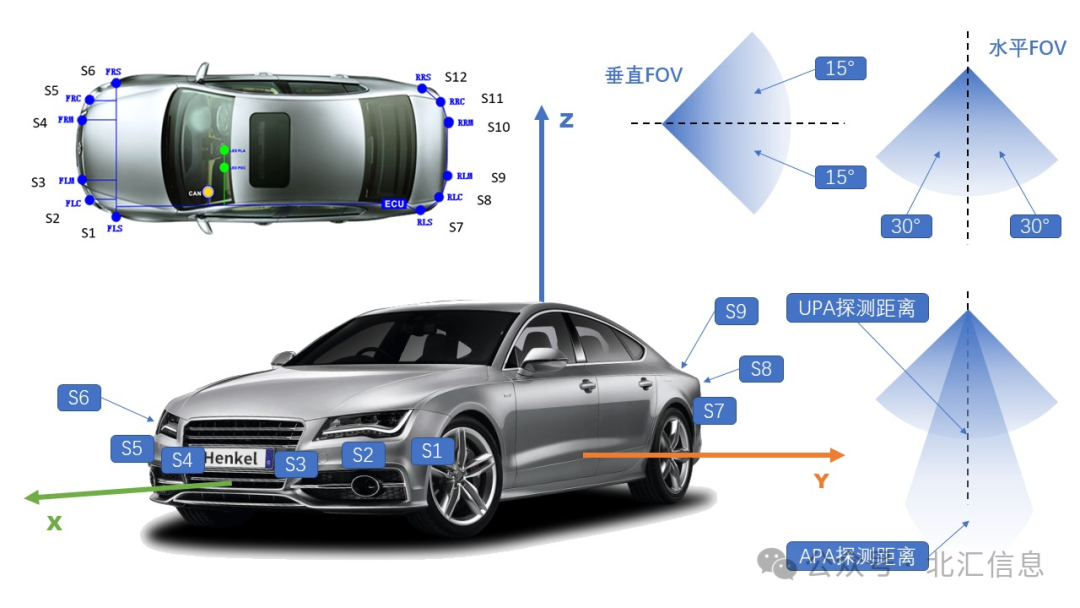
超聲波雷達的基本仿真方法了解了超聲波雷達的基本工作原理以及車輛布局后,需要關注的一些重要參數:
測量范圍:超聲波雷達最遠探測距離;
FOV:超聲波雷達水平視角范圍,垂直視角范圍。
雷達工作頻率:工作頻率對超聲波的擴散、背景噪聲、反射損失有影響,一般超聲波雷達的工作頻率在40kHz左右。
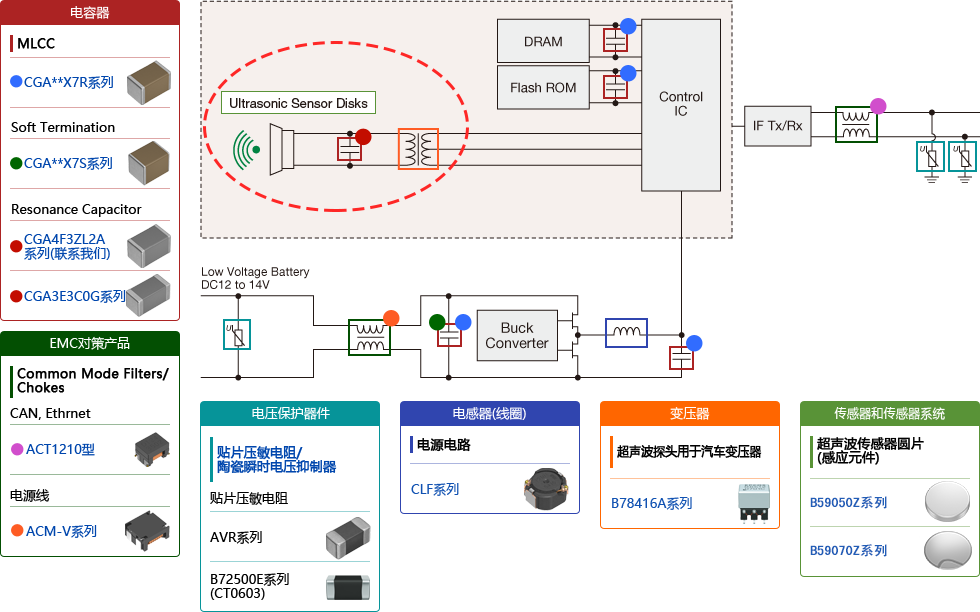
在HiL的仿真環境中,對超聲波雷達的仿真需要借助專業的場景仿真軟件(VTD)以及總線仿真實驗管理軟件(CANoe),在VTD中需要正確配置仿真的超聲波雷達的各個參數,包括雷達的車輛安裝位置、超聲波雷達的最遠探測距離、FOV視角等等。在總線仿真試驗管理軟件中需要明確超聲波使用的通信協議、發送頻率、波特率等。
整個的仿真鏈路中,VTD通過內置的完美傳感器或其他精度更高的自定義開發模型將各個超聲波雷達探測到的與障礙物最近的距離打包成UDP,發送至CANoe進行數據解析及總線仿真,如下圖所示,VTD實時發送12組雷達輸出的UDP數據,通過這種方式,可以有效簡化傳輸鏈路,同時也能提高整個仿真的性能。當然,根據不同的仿真需求,可修改組包數據的結構,將障礙物的三維坐標、ID、屬性等進行輸出,通過獲取不同的數據,結合CANoe可進行更多種類的APA自動泊車測試與驗證。
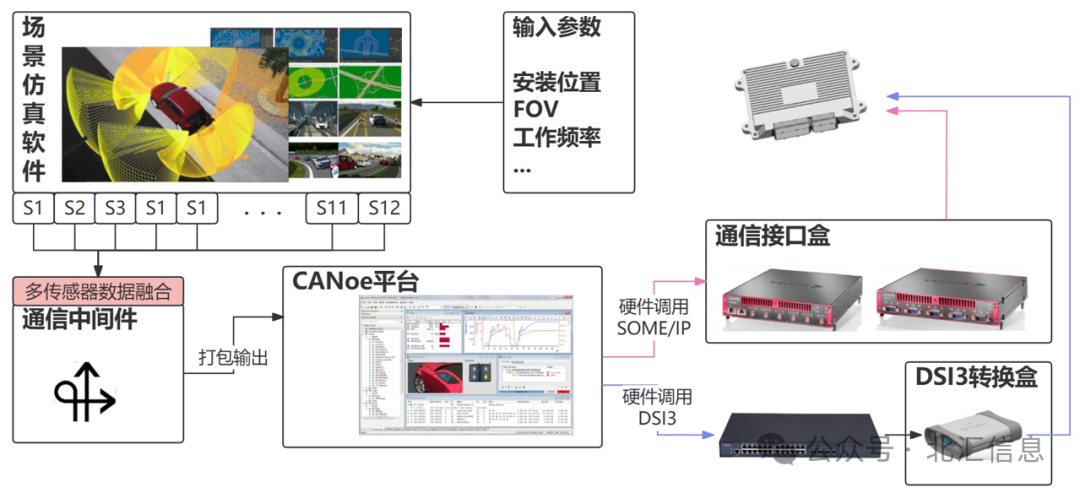
CANoe支持多種總線仿真能力,結合Vector硬件如VN1640、VN1670、VN5650及其他傳感器通信設備,可以為控制器提供CAN/CAN FD、TCP/UDP、SOME/IP、DSI3等多種協議支持,同時軟件提供VN硬件配置窗口,以便用戶方便管理仿真系統中的VN接口盒。

北匯信息的APA仿真功能技術方案
北匯信息在已交付的項目中完成了多種超聲波仿真測試方案的實施落地。針對SOME/IP、CAN/CAN FD總線的超聲波雷達仿真,CANoe結合VN1670、VN5650或其他通信接口盒,可為控制器提供精度更高、報文發送周期更穩定、故障注入類型豐富的總線仿真平臺。
DSI3總線協議具備主從式一對多的異步單線電流電壓型通信、自動分配ID、異步通信、低成本、抗干擾強、支持多種數據格式傳輸等優點,非常適用汽車功能安全等應用場景。
通過CANoe與VTD聯合后,將仿真的超聲波探測的障礙物距離輸出至CANoe,CANoe將距離數據處理成符合要求的飛行時間數據格式并發送至DSI3通信設備,DSI3通信設備通過信號轉換,將仿真的超聲波數據發送至被測控制器,完成控制器的12路超聲波數據仿真。
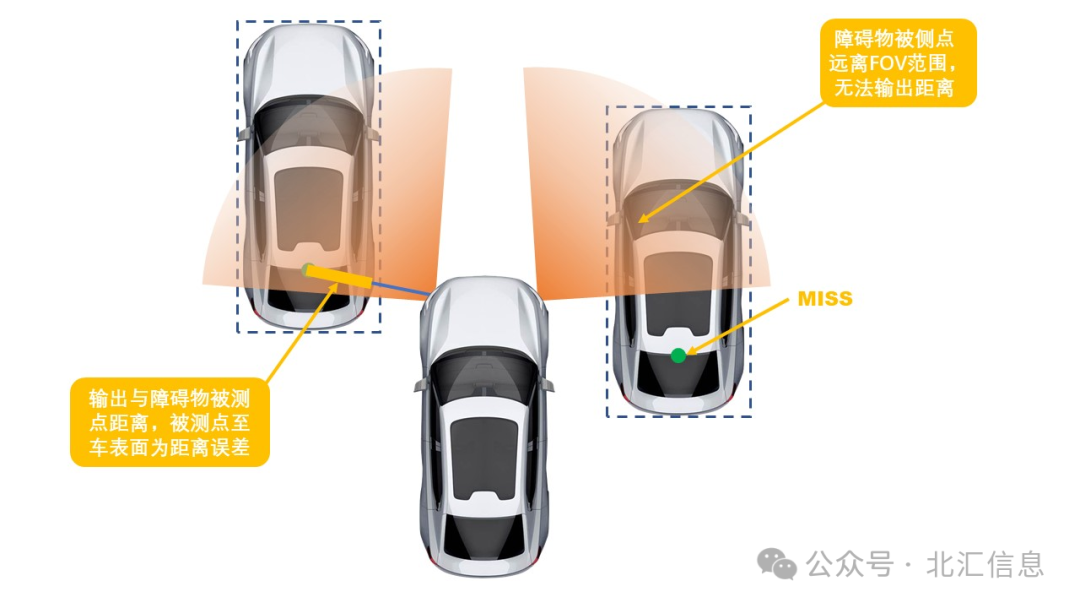
在VTD中使用完美傳感器探測車輛周圍障礙物的情況下,通常由于完美傳感器障礙物檢測特性,會存在一定的距離誤差,完美傳感器的仿真方案并不能對毫米級別的距離做出反應,為了彌補這部分的誤差,需要做更多的額外算法來修正誤差。這不僅占用了更多的計算資源,并且處理之后的結果也不一定能完美的修正誤差。如下圖。
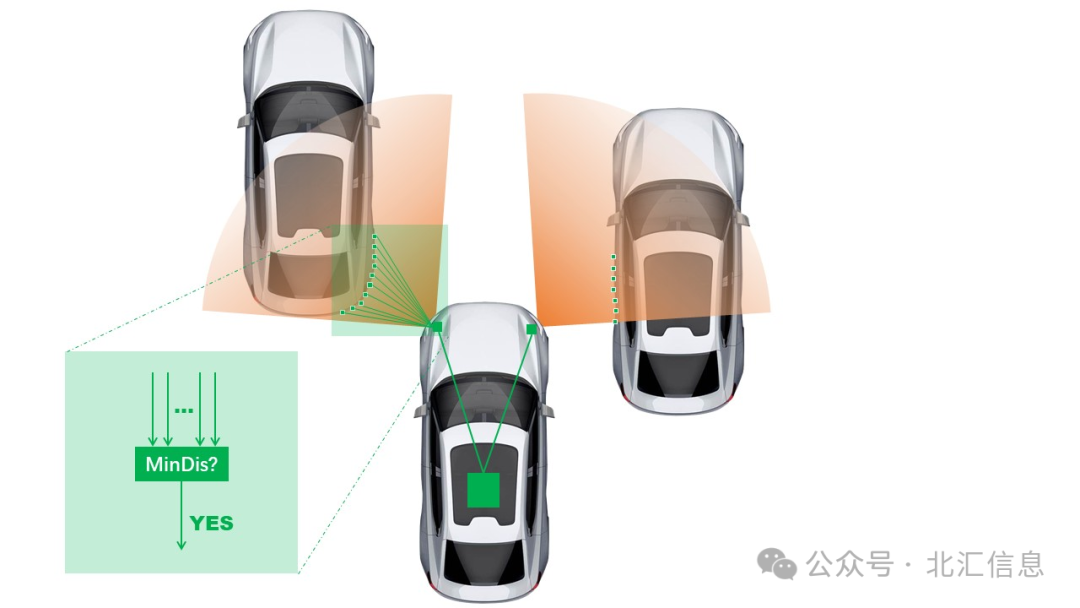
北匯信息為此提供了一套以光線追蹤原理進行測距的超聲波模型,相比使用12路的完美傳感器,光線追蹤的傳感器模型能夠提供毫米甚至微米級別的距離檢測,并且將12路的傳感器模型整合成一個光線追蹤的超聲波模型,極大地簡化了工程的傳感器布置,以及提高仿真的效率。模型的運行環境需要 NVIDIA CUDA環境的支持,支持配置超聲波雷達的最遠探測距離、FOV、安裝位置等等,仿真頻率等,如下為光線追蹤原理圖。

總結
APA自動泊車功能作為智能駕駛中重要的一環,在應對日益錯綜復雜的泊車環境時, HiL測試可以通過虛擬化仿真手段,加速APA功能開發及測試驗證,減少APA實車測試驗證成本,可通過搭建更多復雜、豐富的泊車場景來驗證APA功能的測試覆蓋度。
北匯信息在智能駕駛MiL/SiL/HiL/ViL測試中擁有諸多成功的方案與實施經驗,在持續的項目開發中,北匯信息也致力于新方案的技術驗證與實施,為中國智能網聯汽車發展貢獻自己的力量。
-
APA
+關注
關注
0文章
11瀏覽量
7937 -
自動泊車
+關注
關注
0文章
105瀏覽量
13975 -
超聲波雷達
+關注
關注
1文章
73瀏覽量
4537
發布評論請先 登錄
在自動泊車應用中,雷達為什么優于超聲波
超聲波傳感器在指導汽車安全駕駛中的應用

自動駕駛技術的傳感器超聲波雷達的詳細介紹和應用的資料概述
助力ADAS的眼睛:超聲波雷達系統

12顆超聲波雷達方案占比不斷提升 超聲波雷達需求量穩步增長

低功耗毫米波雷達在泊車輔助應用中優于超聲波的原因







 工商網監
工商網監
評論