 遠程控制自動地板清潔機器人DIY圖解
遠程控制自動地板清潔機器人DIY圖解

步驟1:準備
步驟2:零件和工具
組件:-您可能會很難找到我用過的所有零件
.2x DVD播放器,
某些膠合板,
一些電線,
PCB,s,
冷卻風扇,
舊噴墨打印機,
碳過濾器,
傳感器,
鼓風機,
木材用膠水,
焊接,
膠體電池12V 7Ah,
一些帶螺母的螺釘
鉸鏈
彈簧
旋轉輪
密封帶
LM350的散熱器,
一些電子組件:
2個Buz11 Mosfet,蜂鳴器,2/16 HD44780顯示屏,100nF陶瓷電容器,2x7805穩壓器,8x快速二極管1N4149,Atmega 32 ,為其提供一些LED和200歐姆電阻器
一些金引腳,100k歐姆電阻器,4017計數器,1k歐姆電阻器,BC-548晶體管,2x10k電位計7xButton,HC-05藍牙模塊,HCSR-04聲納
Sharp GP2Y0D810Z0F,Pololu#2460、1000uF和220uF電解電容器,6個ARC-2連接器,LM350穩壓器1uF電解電容器,240歐姆電阻器,芯片插座,模擬伺服,10k歐姆電阻器,
您可以檢查原理圖上電容器和電阻器等元素的確切數量。
工具;
Dremel
手鋸
螺絲刀
木銼
用于焊接的燃燒器
鉗子
熱膠槍
等
第3步:一些硬件和框架
我使用了6毫米膠合板,這使我可以制造堅固輕巧的機器人框架。有些零件是用膠水連接的,有些零件是用木螺釘連接的。以后,您可以按自己喜歡的方式對其進行涂漆。
第4步:電動機
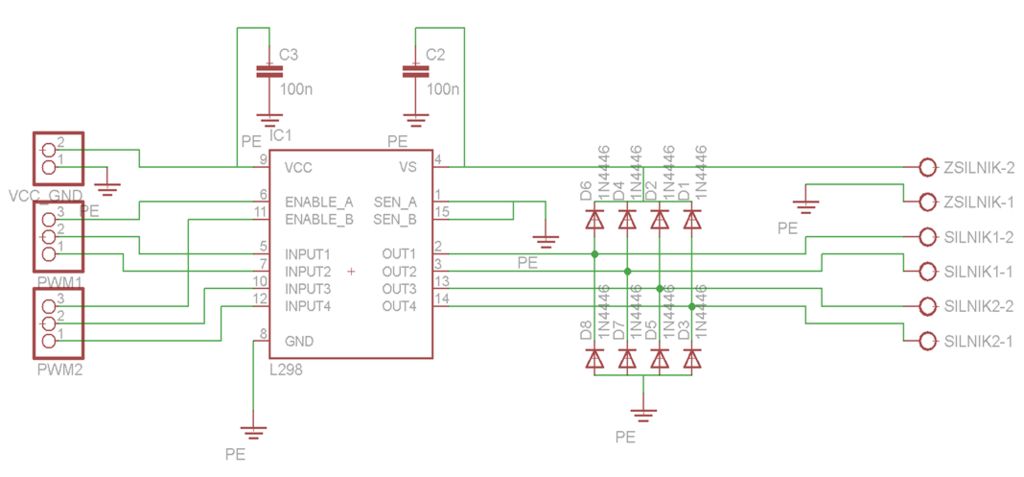
機器人由兩個帶DVD播放器齒輪的高速直流電動機驅動-它們有足夠的扭矩來移動重約5kg的機器人。我使用熱傳遞方法為電機控制器制作了單獨的PCB。電機控制器采用L298N雙H橋制成,每個通道最多可處理2安培。我可以使用微控制器生成的方波進行可變填充,從而控制發動機的速度。車輪和軸由樂高積木制成,如上圖所示。此外,冷卻風扇還用于冷卻發動機過熱。在機器人的前面,我使用了一個旋轉輪,它可以使機器人向各個方向轉動。
步驟5:吸塵器
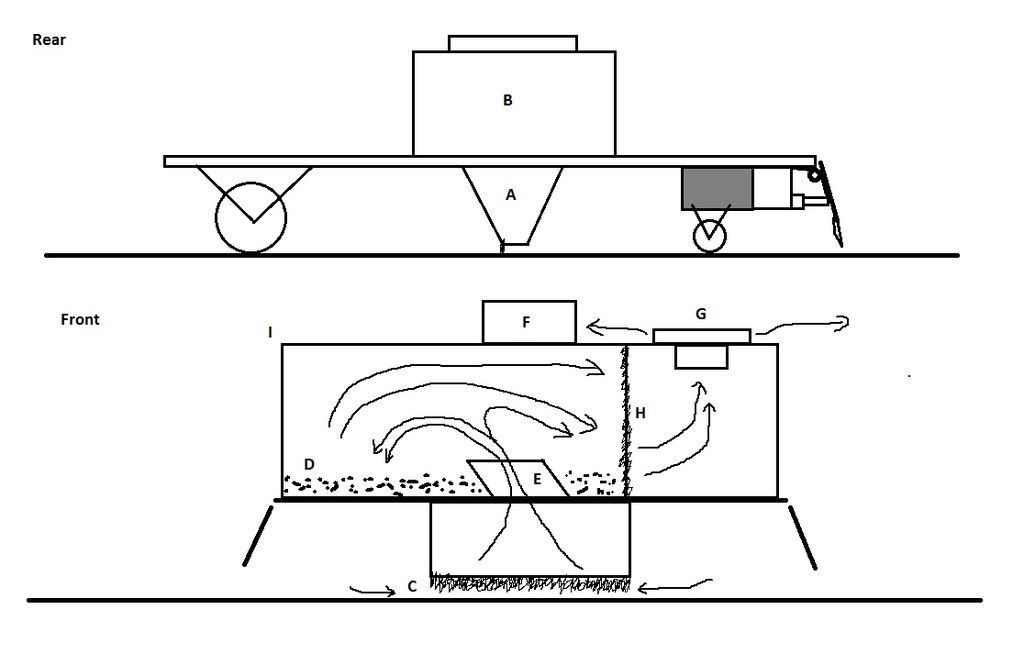
真空吸塵器是我的機器人最重要的部分,它可以清潔每個地板。
的:
真空室(B)
抽吸元件(A)
地板和抽吸元件之間的密封(C )
帶散熱器的鼓風機調速器(在LM350上制造)(F)
鼓風機(G),
帶蓋,您可以排空真空泵的真空室。灰塵和其他雜質(I)
碳過濾器可阻止灰塵(H)
托盤中較大的雜質(D)
用于引導氣流的元件(E)
工作原理:
灰塵和其他雜質被吸入抽吸元件,然后進入真空室。我使用了用于引導氣流的元件(E),該氣流可將較輕的雜質與托盤中沉降的較重雜質分離(D)灰塵被碳過濾器(H)阻擋。鼓風機(G)產生足夠的吸力,從而使操作平穩
箭頭在上面的插圖中說明了氣流的方向。
步驟6:主動拖把
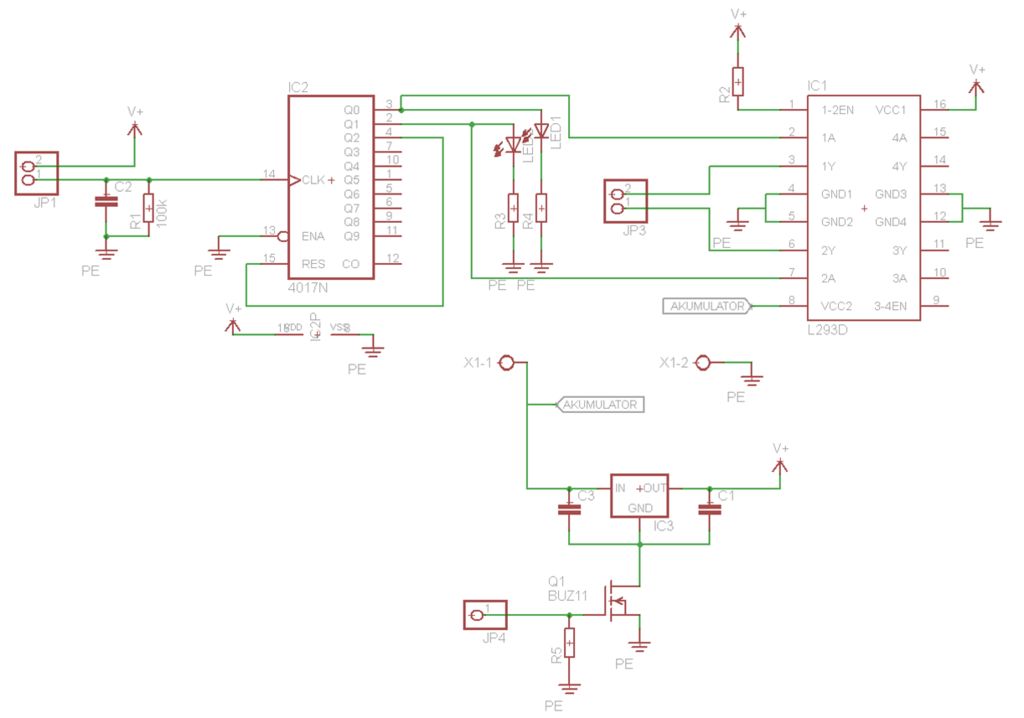
使用過的系統可以準確,高效地擦拭地板。整個機構是由噴墨打印機的加工部分制成的。我不得不縮短這部分并再次焊接。工作原理:拖把通過連接到電機的皮帶向側面移動(從邊緣反彈)。有源拖把驅動器非常簡單,它使用4017集成電路,您可以在上圖中看到原理圖。
步驟7:電池
《我決定使用大型汽車電池,因為它易于充電,容量高(7Ah)并且非常便宜。此解決方案也有缺點:體積大且笨重,因此我不得不使用更好的引擎。機器人可以在充滿電的電池上工作約6個小時。鋰離子電池也是一個不錯的選擇。
步驟8:傳感器簡介
我的機器人配備了以下傳感器,但它們非常昂貴,并且需要專用的充電器。使其可以在全自動模式下運行:安裝在伺服上的HCSR-04聲納,紅外接近傳感器(pololu#2460),夏普GP2Y0D810Z0F數字紅外接近傳感器,某些保險杠。在接下來的步驟中,我將展示該傳感器的工作原理以及應該做什么。
步驟9:保險杠和厚地毯傳感器
1個保險杠(碰撞傳感器)-
每個自主移動機器人中的主要傳感器之一。機器人可以檢測到與其他傳感器未檢測到的物體發生碰撞,從而防止發動機燃燒。 CleanBOT配備3個保險杠區域:
A-左保險杠
B-右保險杠
C-耦合前保險杠
當機器人與障礙物碰撞時,它會執行以下練習:
C *前部碰撞-機器人后退,然后使用超聲波聲納進行測量以找到最佳位置*,然后繼續向前移動直到到達下一個障礙物
A *左側碰撞-機器人向右旋轉90度,然后繼續向前移動直到到達下一個障礙物
B *右側碰撞-機器人向左旋轉90度,然后繼續向前移動,直到到達下一個障礙物
2。厚地毯傳感器
機器人檢測到可能導致機器人阻塞或引擎燃燒的厚地毯時,會停止并返回。原理很簡單:它是一條連接在前保險杠(E)上的彎曲導線(B)。移至地毯后,將電線壓在安裝在鉸鏈(A)上的保險杠上,該保險杠按下按鈕(C)。在所有的保險杠中,我都使用了附加的彈簧(D),該彈簧會觸發保險杠回到其先前的位置。
步驟10:樓梯傳感器
我使用鋒利的GP2Y0D810Z0F來檢測樓梯。敏銳的傳感器可以檢測到跌落,以防止機器人掉下樓梯。當地板在傳感器視場中時(在輸出為低狀態時),它是在d = 2 《-》 10cm范圍內工作的數字傳感器,當傳感器檢測到樓梯時,輸出中的狀態將為高。一旦檢測到樓梯,機器人將立即返回安全距離,然后它將繼續運行。
步驟11:將聲納安裝在伺服系統上
使用附在聲納上的伺服器,我可以進行180度范圍內的測量。
機器人可以確定沿任何方向與障礙物的距離,然后決定哪一側有更多“空間”,并開始開車到這個地方,直到找到下一個障礙。在上面的圖2上,機器人測量到3個距離d1是最長的距離,因此機器人ll將越過該距離。測量次數取決于您編寫的程序。
步驟12:紅外接近傳感器
Pololu#2460 38kHz是一個附加的傳感器設計用于檢測超聲波聲納未檢測到的障礙物,它提供了對機器人前方區域的更多控制。使用此傳感器,還可以檢測到立在地板上的小障礙物,例如電纜和其他扁平物體。
步驟13:顯示
LCD顯示器與微控制器耦合在一起。屏幕上顯示所有對用戶重要的消息。例如,當您通過藍牙顯示啟用自動模式時,顯示以下消息:“啟用自動模式”
步驟14:藍牙和智能手機應用程序
通過HC-05模塊已實現了帶有智能手機的藍牙,該模塊允許使用串行傳輸與微控制器進行通訊。
smatphone上的應用程序以下列方式工作:按下按鈕,智能手機發送一個字節的信息(一個字符),該信息由微控制器接收。微控制器還將相同的字節發送回智能手機以檢查傳輸錯誤。可以執行以下操作:與機器人連接和斷開連接,手動控制,啟用和禁用:自動模式,活動拖把,吹風機。
步驟15:機器人的大腦
主PCB基于8位微控制器AVR Atmega32,它具有自己的電源部分。我也使用熱轉移方法制作了該PCB。程序是用C(GCC)編寫的,它完全基于中斷。為了接收和傳輸數據到藍牙,我使用了內置的USART硬件。微控制器以內部諧振器8 Mhz的頻率計時。轉向計時器和伺服的PWM信號由硬件計時器生成。聲納的脈沖長度也可以通過硬件計時器進行測量。鼓風機由Mosfet晶體管直接從主PCB驅動。
-
機器人
+關注
關注
213文章
29583瀏覽量
212042 -
遠程控制
+關注
關注
4文章
668瀏覽量
35734
發布評論請先 登錄
盤點#機器人開發平臺
網線在機器人領域如何發揮重要作用
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】+初品的體驗
倍加福超聲波傳感器在清潔機器人中的應用
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
關于全自動裝車機器人的詳細介紹
精準定位,深度清潔:揭秘工廠清潔機器人的核心技術
愛普生SGPM01助力智能泳池清潔機器人導航方案

高效節能,普渡清潔機器人引領綠色清潔潮流
商用清潔新紀元:為何商用清潔機器人成為必選,及挑選指南





 工商網監
工商網監
評論