 語音控制避障Arduino機器人車的制作
語音控制避障Arduino機器人車的制作
步驟1:準備
步驟2:
我們可以從網上購買現成的機箱。但是我決定自己做底盤。我用框架和塑料盒做底盤。
我在印度Ebay上買了2個最便宜的帶輪減速電機。您可以在Ebay上輕松找到它們,這些是帶有小齒輪的直流電動機,可降低速度。電機沒有電線,所以我將一些電線焊接到端子上。這些電機消耗的電流很小,因此您無需使用粗線。然后用一些雙面膠帶將電動機粘貼到機箱上。我從當地市場購買了一個小型腳輪,并借助一些螺絲將其固定在底盤上。通過使用腳輪,機器人幾乎可以繞其自身的半徑旋轉。
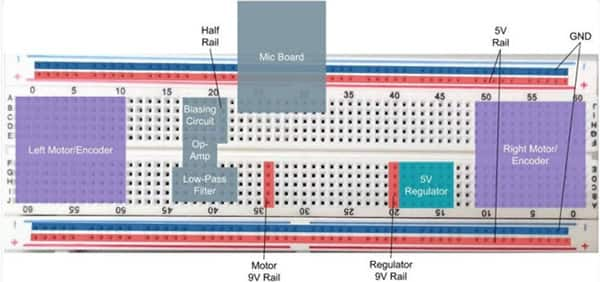
步驟3:將電動機連接到H橋模塊
要控制電機,我使用H橋模塊。通過使用H橋,整個項目變得非常容易。
H橋模塊到Arduino
Vcc到電池+
Gnd到Gnd
5v到Arduino上的5v引腳
左馬達+到Ardino 6引腳
左馬達-到Arduino 5引腳
右馬達+到Arduino 10引腳
正確的電動機-到Arduino 9引腳
注意:如果電動機方向錯誤,請嘗試交換arduino引腳
第4步:設置藍牙模塊
現在將Bluetooth模塊連接至Arduino
Vcc至5v
Gnd至Gnd
Tx至Rx
Rx至Tx
到A0引腳的狀態
注意:在對migboard Arduino板進行編程時,拔下Tx Rx連接。
第5步:超聲波傳感器
為檢測障礙物,我使用了超聲波SR04傳感器。這些傳感器在印度Ebay上僅售90盧比。 Arduino很好地支持了該傳感器。
伺服連接:
Vcc到Arduino 5v引腳
從Gnd到Gnd
信號到Arduino 7引腳
超聲波傳感器連接:
從Vcc到5v
從Gnd到Gnd
轉到Arduino 3針
回聲到Arduino 2針
第6步:編程
我對代碼做了很多實驗。最后我匯編了此代碼。您可以在代碼中更改語音命令。
在此處下載代碼
步驟7:控制機器人的應用
我從Play商店下載應用程序以控制機器人。
-
機器人
+關注
關注
211文章
28745瀏覽量
208883 -
語音控制
+關注
關注
5文章
485瀏覽量
28329 -
Arduino
+關注
關注
188文章
6477瀏覽量
188070
發布評論請先 登錄
相關推薦
機器人的語音功能
艾邁斯歐司朗Belago紅外LED,助力Supernode打造避障掃地機器人

語音識別機器人的工作原理
構建語音控制機器人 - 深入研究電路
構建語音控制機器人 - 線性模型和機器學習

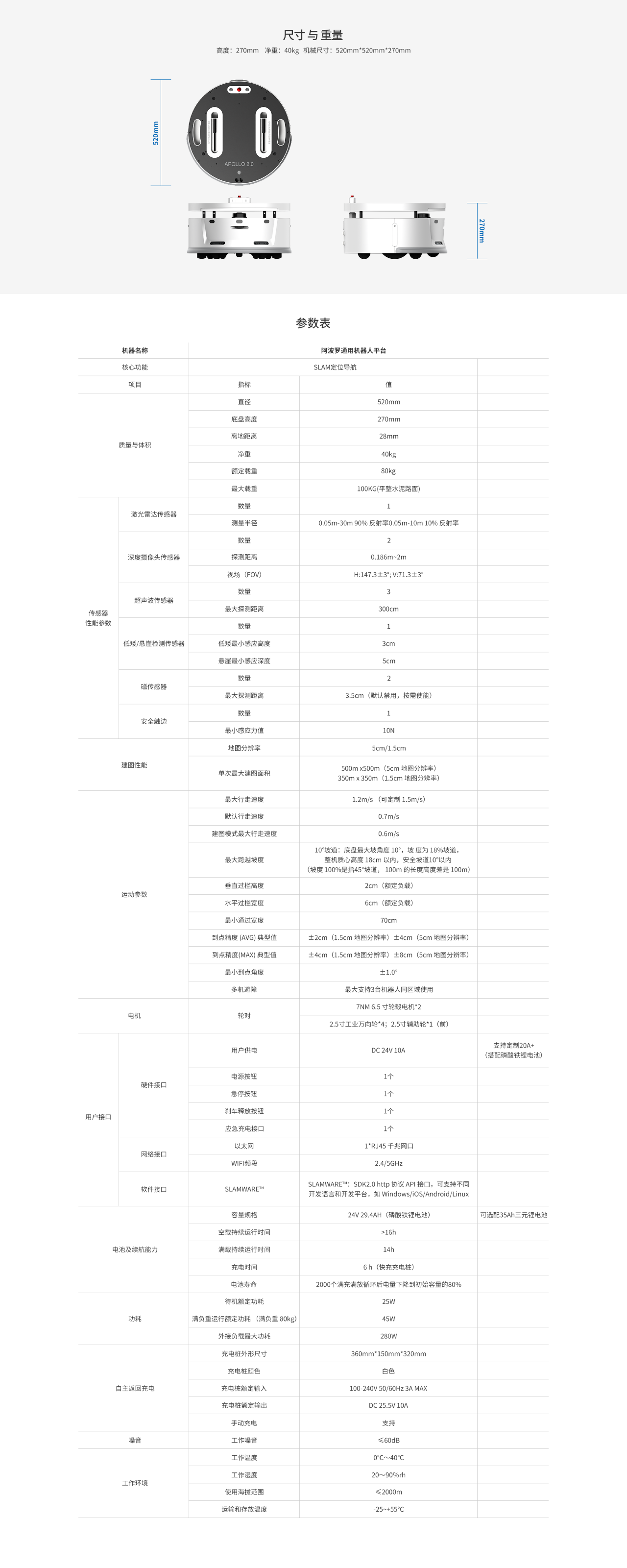
思嵐科技全場景機器人底盤Apollo2.0的特性
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
深圳北站智能化升級:巡檢機器人上崗,明治激光雷達“護航”避障






 工商網監
工商網監
評論