") 基于WLS-KF算法實(shí)現(xiàn)對(duì)目標(biāo)較高精度的定位和跟蹤研究
基于WLS-KF算法實(shí)現(xiàn)對(duì)目標(biāo)較高精度的定位和跟蹤研究
引言
卡爾曼濾波(KF)是一個(gè)不斷預(yù)測(cè)、修正的遞推過(guò)程,已經(jīng)越來(lái)越多地應(yīng)用于動(dòng)態(tài)數(shù)據(jù)處理中。然而在KF模型中,要求觀測(cè)方程是線性形式、狀態(tài)噪聲和測(cè)量噪聲是白噪聲。為了解決這種矛盾,將KF理論應(yīng)用到非線性領(lǐng)域中,擴(kuò)展卡爾曼濾波(EKF)應(yīng)用而生,它圍繞狀態(tài)估計(jì)值對(duì)非線性系統(tǒng)進(jìn)行一階Taylor展開(kāi)使其線性化,但它存在如下不足:一是當(dāng)非線性函數(shù)Taylor展開(kāi)式的高階項(xiàng)無(wú)法忽略時(shí),會(huì)產(chǎn)生較大的線性化誤差;二是EKF假定噪聲均為正態(tài)白噪聲,但是一個(gè)正態(tài)自噪聲經(jīng)過(guò)非線性變換后通常不再呈現(xiàn)正態(tài)性;三是只有在雅可比矩陣存在時(shí)才能線性化,而很多應(yīng)用中雅可比矩陣很難求。針對(duì)這種情況,Julier和Uhlmann等人提出了一種基于非線性變換——Un-scented變換(UT)的卡爾曼濾波算法(UKF)。它通過(guò)確定性采樣得到的一組sigma點(diǎn),可以獲得更多的觀測(cè)假設(shè),對(duì)系統(tǒng)狀態(tài)的均值和協(xié)方差的估計(jì)更為準(zhǔn)確,同時(shí)由于該算法采用了非線性的狀態(tài)方程和觀測(cè)方程,從而避免了線性化誤差。目前,EKF和UKF算法被廣泛應(yīng)用于GPS非線性動(dòng)態(tài)濾波研究中,并取得良好的定位效果。
本文給出了一種加權(quán)最小二乘一卡爾曼濾波(WLS-KF)算法,它利用一組離散采樣點(diǎn),通過(guò)WLS方法產(chǎn)生近似線性化預(yù)測(cè)模型,然后用KF算法對(duì)此模型進(jìn)行校正。以該算法為思路,將其應(yīng)用在GPS非線性動(dòng)態(tài)濾波定位解算中,仿真結(jié)果表明該算法精度介于EKF和UKF之間,從而實(shí)現(xiàn)了對(duì)目標(biāo)較高精度的定位和跟蹤。
1 算法描述
1.1 WLS算法
LS算法是現(xiàn)代測(cè)量技術(shù)中數(shù)據(jù)處理的基本工具,這種方法的特點(diǎn)是算法簡(jiǎn)單,在估計(jì)解算時(shí),不需要知道與被估計(jì)量以及觀測(cè)量有關(guān)的任何統(tǒng)計(jì)信息。
設(shè)X為待估參數(shù)矢量,觀測(cè)矢量為L(zhǎng)。觀測(cè)方程為:
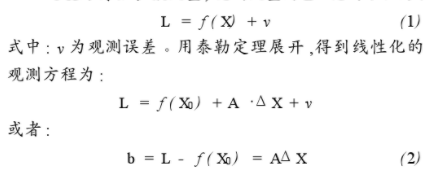
式中:A是系數(shù)矩陣;f(X0)表示用先驗(yàn)參數(shù)計(jì)算的理論觀測(cè)向量;b表示擬合后的殘差;△X是對(duì)先驗(yàn)參數(shù)的小修正向量。
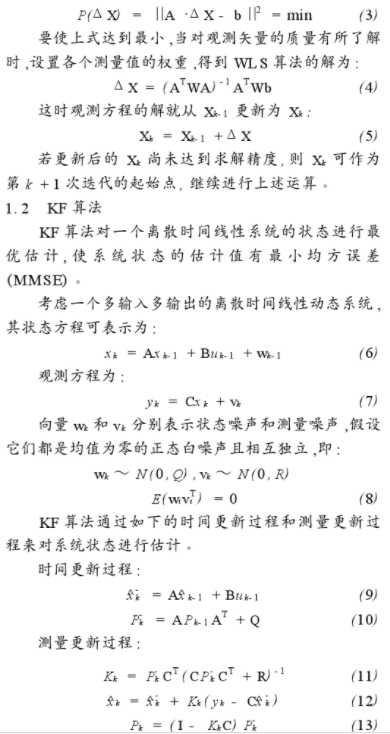
LS算法的指標(biāo)是使各次觀測(cè)量與由參數(shù)估計(jì)得到的觀測(cè)量之差的平方和最小,即:
計(jì)算完測(cè)量更新方程后,整個(gè)過(guò)程再次重復(fù),上一次計(jì)算得到的后驗(yàn)估計(jì)被作為下一次計(jì)算的先驗(yàn)估計(jì)。
1.3 WLS-KF算法
1.3.1 基本思想
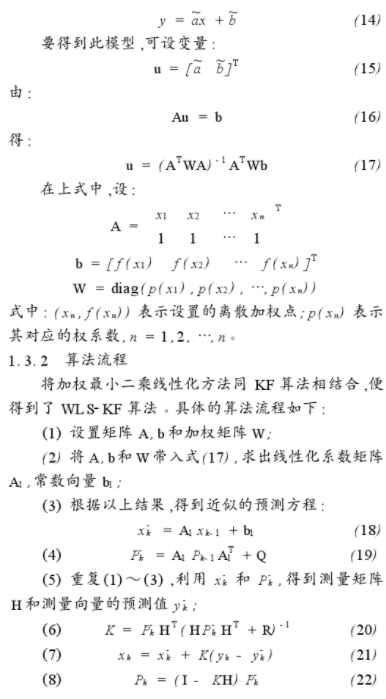
算法基本思想是通過(guò)WLS方法計(jì)算隨機(jī)變量經(jīng)過(guò)非線性變換后的分布參數(shù),它利用離散個(gè)加權(quán)點(diǎn)來(lái)確定近似直線。
設(shè)待確定的近似線性化模型為:
2 實(shí)驗(yàn)結(jié)果與分析
基于運(yùn)動(dòng)載體為質(zhì)點(diǎn)的假設(shè)建立目標(biāo)運(yùn)動(dòng)模型,考慮一個(gè)二維平面曲線運(yùn)動(dòng)系統(tǒng),狀態(tài)定義為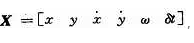 ,分別表示二維方向上的位置變量、速度變量、載體相對(duì)于起始位置的轉(zhuǎn)彎角度及接收機(jī)鐘差。?
,分別表示二維方向上的位置變量、速度變量、載體相對(duì)于起始位置的轉(zhuǎn)彎角度及接收機(jī)鐘差。?
系統(tǒng)狀態(tài)方程為:
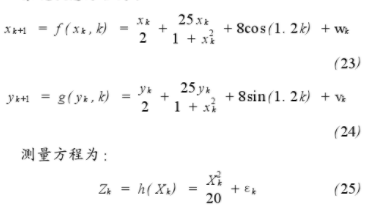
式中:wk,vk和εk為相互獨(dú)立的高斯白噪聲序列,wk~N(0,10),vk~N(0,10),εk~N(0,1)。此系統(tǒng)是具有可加噪聲的離散非線性時(shí)變系統(tǒng),觀測(cè)時(shí)間為100 s,觀測(cè)周期為1 s。WLS-KF和EKF,UKF算法的二維預(yù)測(cè)結(jié)果分別如圖1,圖2所示,預(yù)測(cè)結(jié)果誤差分析見(jiàn)表1。
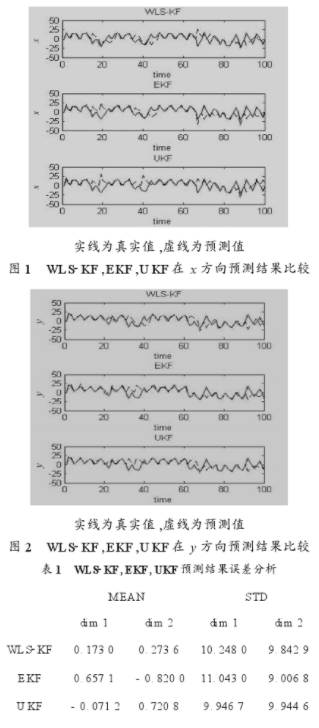
為便于比較,算法中使用的隨機(jī)數(shù)據(jù)均來(lái)自于提前保存好的隨機(jī)序列。結(jié)果表明,WLS-KF算法的計(jì)算量適中,精度介于EKF和UKF之間,且效率同KF接近。
3 結(jié)語(yǔ)
本文引入了一種基于加權(quán)最小二乘的線性化方法,將其與KF算法相結(jié)合,給出了可以應(yīng)用于GPS非線性動(dòng)態(tài)濾波系統(tǒng)的WLS-KF算法。該算法不需要求偏導(dǎo)數(shù),算法精度介于EKF和UKF之間,可以實(shí)現(xiàn)對(duì)目標(biāo)較高精度的定位和跟蹤,有一定的應(yīng)用價(jià)值。
責(zé)任編輯:gt
-
噪聲
+關(guān)注
關(guān)注
13文章
1137瀏覽量
47908 -
濾波
+關(guān)注
關(guān)注
10文章
679瀏覽量
57176 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4372瀏覽量
64292
發(fā)布評(píng)論請(qǐng)先 登錄
【TL6748 DSP申請(qǐng)】基于DSP的目標(biāo)跟蹤算法研究及優(yōu)化實(shí)現(xiàn)
【NUCLEO-F412ZG申請(qǐng)】高精度低功耗室內(nèi)定位系統(tǒng)
【芯靈思A83T試用申請(qǐng)】嵌入式視覺(jué)--遠(yuǎn)距離物體跟蹤與定位
基于QT+OpenCv的目標(biāo)跟蹤算法實(shí)現(xiàn)
低成本高精度定位方案是未來(lái)市場(chǎng)趨勢(shì),基于uwb高精度定位的案例分析
無(wú)線傳感網(wǎng)多簇頭協(xié)助的目標(biāo)跟蹤(二)
基于多傳感器的多模型機(jī)動(dòng)目標(biāo)跟蹤算法設(shè)計(jì)
OPPO推出自研的TK 高精度定位算法 實(shí)現(xiàn)精度小于 1 米
OPPO推出自研RTK高精度定位算法,精度小于1米
OPPO推出自研RTK高精度定位算法,實(shí)現(xiàn)精度小于1米
基于非線性濾波和多維標(biāo)度的目標(biāo)跟蹤算法

基于KCF的目標(biāo)跟蹤算法研究及嵌入式系統(tǒng)實(shí)現(xiàn)

如何對(duì)RTK高精度定位算法進(jìn)行驗(yàn)證
探索UWB技術(shù)的獨(dú)特優(yōu)勢(shì):實(shí)現(xiàn)高精度定位
物聯(lián)網(wǎng)系統(tǒng)中高精度RTK定位方案的實(shí)現(xiàn)_高精度定位模塊






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論