") 駕駛腦使得軟件架構(gòu)可以在不同傳感器配置車輛平臺上方便地移植
駕駛腦使得軟件架構(gòu)可以在不同傳感器配置車輛平臺上方便地移植
智能駕駛車輛試驗平臺是人工智能科學(xué)、認(rèn)知科學(xué)、控制科學(xué)等多個學(xué)科領(lǐng)域的最新理論與實踐的成果,也是研究智能駕駛理論與技術(shù)的基礎(chǔ)。不同智能駕駛試驗平臺的傳感器型號、數(shù)量、安裝位置各不相同,導(dǎo)致傳感器信息處理模塊也各不相同;不同駕駛地圖,其提供信息的粒度也沒有固定標(biāo)準(zhǔn),由此構(gòu)成的智能駕駛系統(tǒng)軟件模塊的數(shù)量、接口各不相同。
中國工程院李德毅院士科研團(tuán)隊在中國工程院院刊《Engineering》撰文指出,基于以駕駛腦為核心的智能駕駛車輛軟件與硬件架構(gòu),決策模塊將不直接與傳感器信息處理模塊發(fā)生關(guān)聯(lián),通過駕駛認(rèn)知的形式化語言,將駕駛認(rèn)知形式化,由駕駛腦認(rèn)知形成決策。駕駛認(rèn)知的形式化降低了傳感器數(shù)量、類型、安裝位置的變化對整個軟件架構(gòu)的影響,使得軟件架構(gòu)可以在不同傳感器配置車輛平臺上方便地移植。
一、引言
智能駕駛車輛試驗平臺是人工智能科學(xué)、認(rèn)知科學(xué)、控制科學(xué)等多個學(xué)科領(lǐng)域的最新理論與實踐的成果,也是研究智能駕駛理論與技術(shù)的基礎(chǔ)。
早在20世紀(jì)50年代,美國就開展了無人駕駛車輛研究。1950年,美國貝瑞特電子公司研制出全球第一臺自主導(dǎo)航車。美國無人駕駛車輛研究起源于美國國防部高級研究項目計劃局(Defense Advanced Research Projects Agency,DARPA),其研究水平處于世界領(lǐng)先地位。歐洲各國自20世紀(jì)80年代中期開始研發(fā)無人駕駛技術(shù),將無人駕駛車輛作為獨立個體,讓車輛混行于正常交通流。1987年慕尼黑聯(lián)邦國防軍大學(xué)、戴姆勒奔馳、寶馬、標(biāo)致、捷豹等著名研發(fā)機(jī)構(gòu)和汽車企業(yè)聯(lián)合參與開展普羅米修斯計劃(Programme for a European Traffic of Highest Efficiency and Unprecedented Safety,PROMETHEUS),在世界范圍內(nèi)產(chǎn)生重大影響。自20世紀(jì)90年代開始,日本交通部門的高級駕駛輔助公路系統(tǒng)研究協(xié)會(Advanced Cruise-Assist Highway System Research Asso-ciation,AHSRA)發(fā)起了高級安全車輛(advanced safety vehicle,ASV)項目,以每5年為一個階段開展無人駕駛技術(shù)研究。我國無人駕駛技術(shù)的研究始于20世紀(jì)80年代后期,由國家高技術(shù)研究發(fā)展計劃(863計劃)和國防科學(xué)技術(shù)工業(yè)委員會相關(guān)研究計劃支持。自2008年起,在國家自然科學(xué)基金委員會的支持下,中國開展智能車未來挑戰(zhàn)賽,參賽隊伍數(shù)量逐年增長,比賽難度逐年提升,賽車隊的完成質(zhì)量逐年提高,車企參與熱情逐漸加強(qiáng),為無人駕駛技術(shù)引入國產(chǎn)汽車打下了堅實基礎(chǔ),無人駕駛技術(shù)取得飛速進(jìn)展。
傳感器配置是智能駕駛車輛的基礎(chǔ),用來感知智能駕駛車輛實時的外部環(huán)境與內(nèi)部環(huán)境,包括感知智能駕駛車輛周圍環(huán)境、自車狀態(tài)、航向角、位置等。根據(jù)不同的研究策略,不同的智能駕駛車輛試驗平臺有不同的傳感器配置,傳感器類型、安裝位置也各不相同,沒有統(tǒng)一標(biāo)準(zhǔn)的方案。有些研究團(tuán)隊主要依賴于視覺傳感器,典型代表是意大利帕爾馬大學(xué)VisLab實驗室的智能車團(tuán)隊與卡爾斯魯厄理工學(xué)院智能車輛團(tuán)隊;有些研究團(tuán)隊主要依賴于雷達(dá)傳感器,典型代表是Google的無人駕駛車輛團(tuán)隊與慕尼黑大學(xué)無人駕駛車輛團(tuán)隊。在傳感器配置方案中,既要考慮決策程序的需要,也要考慮通過必要冗余和印證提高環(huán)境感知的可靠性,同樣需要考慮傳感器配置的成本。傳感器的種類和配置,既沒有唯一解,也不會有最終解。本文通過設(shè)計了以駕駛腦為核心的無人駕駛車輛的技術(shù)架構(gòu),體現(xiàn)人類認(rèn)知的駕駛腦的架構(gòu)設(shè)計,降低傳感器數(shù)量、類型、安裝位置的變化對整個架構(gòu)的影響,使得基于以駕駛腦為核心的技術(shù)架構(gòu)可以在不同傳感器配置的智能駕駛車輛平臺上進(jìn)行移植。
智能駕駛技術(shù)以及智能駕駛車輛研究的重要意義在于提高交通安全,預(yù)防與降低交通事故,減少燃油消耗帶來的環(huán)境污染,加速社會智能化發(fā)展。智能駕駛車輛是輪式機(jī)器人的一種,它集認(rèn)知科學(xué)、人工智能科學(xué)與控制科學(xué)等前沿科學(xué)技術(shù),其研究目標(biāo)是實現(xiàn)人類駕駛與機(jī)器駕駛的雙駕雙控,人與機(jī)器和諧駕駛,提高車輛的行駛安全,促進(jìn)車輛智能工業(yè)的發(fā)展。
本文通過對人類駕駛員的駕駛活動進(jìn)行分析,構(gòu)建基于駕駛腦的技術(shù)架構(gòu)的智能駕駛車輛硬件平臺,主要貢獻(xiàn)總結(jié)如下:
(1)基于猛獅智能車輛測試平臺,對大腦認(rèn)知的工作原理和人類駕駛員的駕駛活動進(jìn)行了分析,建立駕駛大腦的不同功能區(qū)域和計算機(jī)軟件模塊之間的關(guān)系。通過駕駛認(rèn)知語言進(jìn)行駕駛認(rèn)知表達(dá),也就是說,以駕駛腦為設(shè)計核心,為智能車輛開發(fā)通用的智能駕駛軟件體系結(jié)構(gòu)。
(2)智能車輛使用各種各樣的傳感器。這些傳感器安裝在不同的位置,為了信息整合建立了一個統(tǒng)一的架構(gòu)。在本文中,智能決策模塊和傳感器之間低耦合的方法是根據(jù)自然的人類認(rèn)知規(guī)律進(jìn)行設(shè)計與建立,并對應(yīng)于上述設(shè)計(即以駕駛腦為核心)來實現(xiàn)的。
本文按如下的方式進(jìn)行組織,第二部分對人類駕駛活動進(jìn)行分析與構(gòu)建駕駛腦架構(gòu);第三部分基于猛獅智能駕駛車輛平臺建立駕駛腦架構(gòu)的硬件配置與連接;第四部分介紹猛獅智能駕駛車輛傳感器配置,并進(jìn)行傳感器分析;第五部分進(jìn)行討論;第六部分總結(jié)全文。
二、駕駛腦與人腦功能區(qū)域?qū)?yīng)關(guān)系
不論是人類駕駛還是無人駕駛系統(tǒng),其駕駛活動均 涵蓋3個空間:感知空間、認(rèn)知空間與物理空間。
在感知空間中,人通過視覺、嗅覺、觸覺等各種感官,無人駕駛車輛通過各類傳感器,完成對周邊環(huán)境和自身狀態(tài)的信號獲取。
在認(rèn)知空間中,人腦中的駕駛相關(guān)區(qū)域和無人駕駛車輛的駕駛腦,通過選擇性注意機(jī)制,從感知空間各類信號中抽取出與駕駛活動相關(guān)的交通要素,形成駕駛態(tài)勢,并利用已有知識和經(jīng)驗,對當(dāng)前和歷史駕駛態(tài)勢進(jìn)行分析和理解,做出決策。
在物理空間中,人通過四肢,無人駕駛車輛通過機(jī)械結(jié)構(gòu)及電信號,控制方向盤、油門、剎車,使車輛達(dá)到或接近預(yù)期狀態(tài),并將當(dāng)前狀態(tài)反饋給感知空間,形成閉環(huán)控制(圖1)。
圖1 駕駛活動中的3個空間
人腦通過不同區(qū)域的協(xié)同工作,完成學(xué)習(xí)與記憶, 實現(xiàn)駕駛活動。駕駛腦利用計算機(jī)技術(shù)解構(gòu)這一活動機(jī)制,分析與完成人腦各功能區(qū)域與駕駛腦功能模塊的對應(yīng)關(guān)系。人腦主要包括感覺記憶、工作記憶、長期記憶、計算中樞與思維、動機(jī)、性格、情緒等功能區(qū)域。
感覺記憶完成對感官信息的瞬時存儲,盡管存儲時 間短,但信息量大。對應(yīng)于智能車載傳感器對周邊環(huán)境 的感知。傳感器得到的圖像、點云等原始信號(如存儲在緩存區(qū)內(nèi)),新數(shù)據(jù)迅速覆蓋舊數(shù)據(jù),這一機(jī)制與感覺記憶的工作原理相似。
感覺記憶中的感官信息,由計算中樞與思維迅速分析,通過選擇性注意機(jī)制,抽取與當(dāng)前活動相關(guān)的內(nèi)容,傳遞給工作記憶。對應(yīng)于各駕駛腦中傳感器的信息處理模塊,完成各類車載傳感器信息的預(yù)處理與分析,獲取車道標(biāo)線、紅綠燈、交通標(biāo)志、周車、行人、自車狀態(tài)與位置等與駕駛有關(guān)的信息,與駕駛無關(guān)的信息則被迅速丟棄。
長期記憶中存儲重要的駕駛經(jīng)驗、知識、場景等信息。對應(yīng)于智能駕駛的駕駛地圖與駕駛操作模型,駕駛地圖精確記錄了與駕駛相關(guān)的地理信息,包括車道寬度、交通標(biāo)志、靜態(tài)障礙物信息等。駕駛操作模型包括軌跡跟蹤模型、跟馳模型、換道模型、超車模型等,是智能駕駛車輛的操作規(guī)范。駕駛地圖與駕駛操作模型共同構(gòu)成了智能駕駛系統(tǒng)的先驗知識。長期記憶中與當(dāng)前活動相關(guān)的內(nèi)容由計算中樞與思維完成抽取,傳遞給工作記憶。這一抽取過程對應(yīng)于智能駕駛車輛的駕駛地圖映射模塊。
工作記憶中暫存著與當(dāng)前駕駛活動相關(guān)的重要信息。這些信息部分來自于感覺記憶中抽取得到的實時信息,部分來自于長期記憶中抽取得到的先驗知識。這些實時信息和先驗知識相互融合,為計算中樞與思維提供分析與決策的信息池。與之對應(yīng),智能駕駛系統(tǒng)包括一個公共數(shù)據(jù)池。數(shù)據(jù)池是駕駛認(rèn)知的形式化表達(dá),各傳感器信息處理模塊提供的多元異構(gòu)實時駕駛信息,以及駕駛地圖提供的駕駛先驗信息,用駕駛態(tài)勢形式化語言進(jìn)行統(tǒng)一表達(dá),全面反映無人駕駛車輛周邊的駕駛態(tài)勢。
人類計算中樞與思維根據(jù)工作記憶中的信息實時進(jìn)行決策,并由四肢控制執(zhí)行機(jī)構(gòu)做出反應(yīng)。對應(yīng)于智能駕駛系統(tǒng)的智能決策與自動控制模塊。智能決策模塊根據(jù)當(dāng)前或歷史駕駛態(tài)勢,結(jié)合先驗知識,完成行為選擇、路徑與速度規(guī)劃等功能。自動控制模塊接收規(guī)劃路徑與速度,完成對油門、剎車、方向的協(xié)同控制,使車輛達(dá)到或接近預(yù)期狀態(tài)。
人腦中還有性格、情緒等功能區(qū)域。性格反映了不同駕駛員在不同時間、地點的駕駛風(fēng)格,對于智能駕駛系統(tǒng),駕駛風(fēng)格由駕駛操作模型中的參數(shù)決定。情緒是生物的特有屬性,人類駕駛行為會受到情緒焦躁、恐懼等的影響,妨礙安全駕駛。駕駛腦的實現(xiàn)不包括人腦中的情緒,因此有必要確保駕駛行為的安全性和穩(wěn)定性。人腦功能區(qū)域與駕駛腦功能模塊的對應(yīng)關(guān)系如圖2所示。方框描述了駕駛腦的功能。
圖2 人腦功能區(qū)域與駕駛腦功能模塊的對應(yīng)關(guān)系。SLAM:即時定位于映射
不同的智能駕駛試驗平臺的傳感器型號、數(shù)量、安裝位置各不相同,傳感器信息處理模塊也各不相同;不同的駕駛地圖,其提供信息的粒度也沒有固定標(biāo)準(zhǔn)。由此構(gòu)成的智能駕駛系統(tǒng)軟件模塊的數(shù)量、接口各不相同。以駕駛腦為核心,將駕駛認(rèn)知形式化,利用駕駛認(rèn)知的形式化語言,設(shè)計通用的智能駕駛軟件架構(gòu)。本架構(gòu)中,智能決策模塊并不直接與傳感器信息發(fā)生耦合,通過傳感器信息和地圖先驗信息綜合形成的全面的駕駛態(tài)勢完成智能決策。基于駕駛腦的猛獅智能駕駛試驗平臺架構(gòu)如圖3所示。
圖3 基于駕駛腦架構(gòu)的猛獅智能駕駛試驗平臺。CAN:控制器域網(wǎng);CT:計算機(jī)斷層掃描;GPS:全球定位系統(tǒng);MMW:毫米波;OBD:車載診斷;RTK:實時動態(tài)
三、基于駕駛腦的硬件架構(gòu)
(一)硬件配置
智能駕駛車輛平臺機(jī)械結(jié)構(gòu)各不相同,如汽油車、電動汽車和公共汽車,機(jī)械及電氣改造也有所差異。在大量工程試驗后,智能駕駛車輛試驗平臺均可通過CAN總線進(jìn)行實時通信,實時準(zhǔn)確地控制智能駕駛車輛方向、油門及制動,經(jīng)過智能駕駛車輛動力學(xué)性能測試保證了智能駕駛車輛與成品車輛動力學(xué)性能的一致性。
智能駕駛車輛根據(jù)環(huán)境感知的可靠性與傳感器配置的成本,進(jìn)行車載傳感器的配置。以雷達(dá)傳感器為例,SICK激光雷達(dá)、毫米波雷達(dá)識別低矮障礙物,四線激光雷達(dá)識別動態(tài)障礙物,八線激光雷達(dá)識別道路可行駛區(qū)域,Velodyne 64線激光雷達(dá)識別動態(tài)障礙物的速度、道路邊界、車身定位。根據(jù)決策程序的需要可以部署一個Velodyne 64線激光雷達(dá),也可以同時部署多個激光雷達(dá)的組合,但需結(jié)合無人駕駛車輛硬件平臺的成本。以視覺傳感器為例,視覺傳感器的配置方案是可以在無人駕駛車輛某一位置部署一個廣角攝像頭或全景攝像頭,通過多線程實現(xiàn)一個攝像頭多目標(biāo)的并行檢測,如對停止線、斑馬線、車道線、紅綠燈、交通標(biāo)志牌、行人、車輛、動態(tài)與靜態(tài)障礙物等進(jìn)行檢測與識別;也可以在無人駕駛車輛不同位置部署多個廣角攝像頭或全景攝像頭,實現(xiàn)每個攝像頭完成一項專門的檢測與識別任務(wù)。基于駕駛腦的智能駕駛車輛硬件平臺已經(jīng)驗證了不同類型、不同廠商的多種傳感器,并在不同的智能駕駛車輛試驗平臺進(jìn)行測試,保證了信息的可靠性和冗余性。
圖4顯示了猛獅智能駕駛車輛的傳感器配置。猛獅智能駕駛車輛試驗平臺在車輛頂部安裝Ibeo的8線激光雷達(dá),車輛正前方安裝了一個SICK單線激光雷達(dá),用于低矮障礙物的檢測,在車輛后部安裝一個SICK單線激光雷達(dá)與一個毫米波雷達(dá),為基于雷達(dá)的同步定位與地圖繪制(simultaneous localization and mapping,SLAM)提供豐富的數(shù)據(jù)支撐,雷達(dá)是無人駕駛車輛試驗平臺中廣泛采用的傳感器之一。此外,猛獅智能駕駛車輛試驗平臺視覺傳感器的配置主要包括在車輛內(nèi)部前擋風(fēng)玻璃正上方安裝了3個AVT 1394 Pike F-100C攝像頭,在左右后視鏡正下方位置各裝了一個視覺傳感器,前者主要用于感知交通標(biāo)志、交通信號燈等。后者主要為了采集左、右車道線圖像,提高車道線識別與檢測的準(zhǔn)確性。猛獅智能駕駛車輛試驗平臺的導(dǎo)航定位系統(tǒng)采用NovAtel SPAN-CPT產(chǎn)品,主要由全球定位系統(tǒng)(glob-al positioning system,GPS)和慣性導(dǎo)航系統(tǒng)(inertial navigation system,INS)兩部分組成。
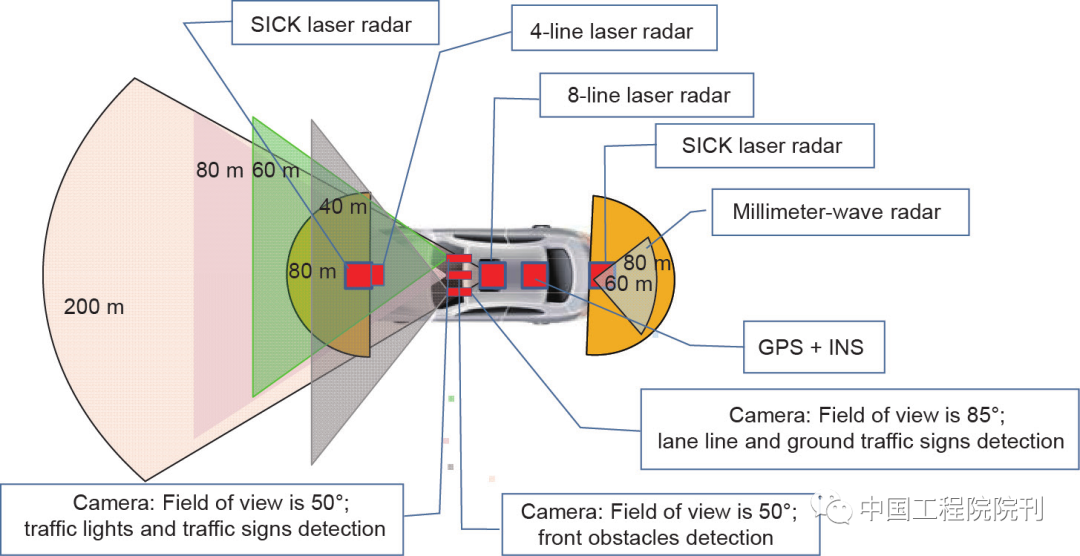
圖4 猛獅智能駕駛車的傳感器配置
通過猛獅智能駕駛車輛試驗平臺的傳感器配置測試,不同的傳感器配置方案具有不同的功能,功能間相互補(bǔ)充。駕駛腦被認(rèn)為是無人駕駛車輛軟件與硬件架構(gòu)的核心。感知的結(jié)果表現(xiàn)為反映時序的點云圖簇,認(rèn)知的結(jié)果表現(xiàn)為駕駛態(tài)勢圖簇,決策的結(jié)果表現(xiàn)為認(rèn)知箭頭簇,通過駕駛認(rèn)知的形式化語言駕駛態(tài)勢認(rèn)知圖,將駕駛認(rèn)知形式化,由駕駛腦認(rèn)知形成駕駛態(tài)勢圖簇以進(jìn)行決策,而決策的結(jié)果為形象化的認(rèn)知箭頭簇。體現(xiàn)人類認(rèn)知的駕駛腦的架構(gòu)設(shè)計,是智能駕駛車輛的核心。駕駛認(rèn)知的形式化降低了傳感器數(shù)量、類型、安裝位置的變化對整個架構(gòu)的影響,使得架構(gòu)可以在不同傳感器配置的車輛平臺上進(jìn)行方便的移植。
(二)硬件連接
猛獅智能車輛的物理連接如圖5所示。SICK激光雷達(dá)和Ibeo激光雷達(dá)通過交換機(jī)與工控機(jī)(IPC)連接。Delphi毫米波雷達(dá)(MMW)通過CAN總線與IPC直接相連。GPS和INS通過RS232串行總線與IPC相連。AVT 1394 Pike F-100C攝像機(jī)通過1394標(biāo)準(zhǔn)視頻傳輸線與IPC 相連。IPC完成數(shù)據(jù)融合、決策和規(guī)劃、動態(tài)控制的功 能。控制指令通過CAN總線發(fā)送給油門、制動和方向盤 的執(zhí)行器。
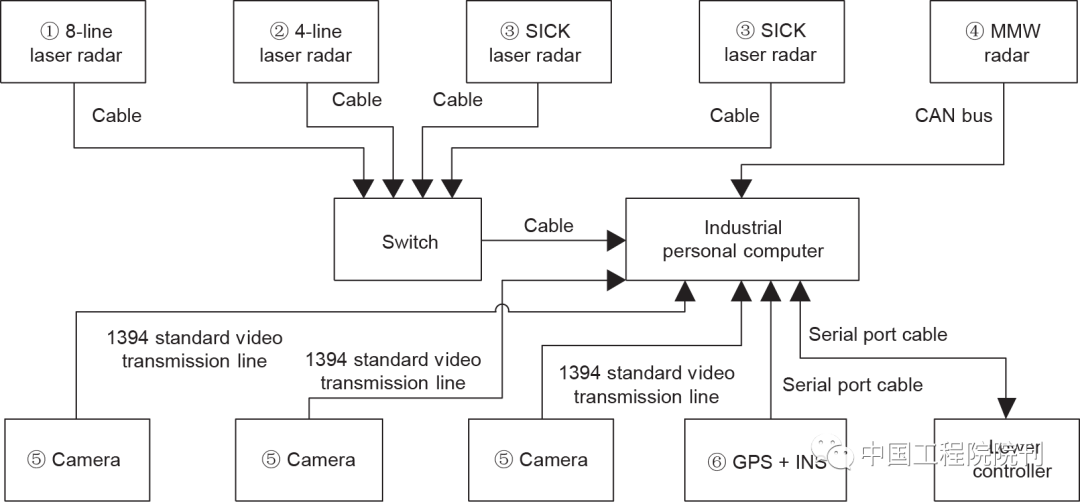
圖5 猛獅智能駕駛車的傳感器配置
(三)硬件平臺性能分析
基于駕駛腦的無人駕駛車輛架構(gòu)將智能決策與傳感器信息解耦。通過傳感器信息處理模塊的輸出,由駕駛認(rèn)知形式化語言進(jìn)行統(tǒng)一,構(gòu)成駕駛態(tài)勢實時信息;駕駛地圖中的信息,則根據(jù)車輛實時位置及朝向, 映射到駕駛態(tài)勢中,與駕駛態(tài)勢實時信息融合,形成全面反映當(dāng)前駕駛態(tài)勢的公共數(shù)據(jù)池。智能決策模塊以這一公共數(shù)據(jù)池為基礎(chǔ),綜合考慮交通規(guī)則、駕駛經(jīng)驗等先驗知識,完成智能決策。通過駕駛認(rèn)知的形式化語言,在駕駛信息完備的條件下,增加、減少一路或幾路傳感器,改變傳感器型號或安裝位置,不再對智能決策直接造成影響。整個架構(gòu)只需做很少的改動,甚至完全不需調(diào)整,就可以在不同車輛試驗平臺上方便地遷移。
四、基于駕駛腦的實車硬件平臺
(一)猛獅智能車硬件平臺
猛獅智能車是在李德毅教授的指導(dǎo)下,由清華大學(xué)和陸軍軍事交通學(xué)院合作設(shè)計和開發(fā)的。圖6顯示了猛獅智能車的外觀,圖7顯示了猛獅智能車(猛獅3號)傳感器部署,由5個雷達(dá)傳感器、3個視覺傳感器和一個集成的位置/姿態(tài)傳感器組成。雷達(dá)傳感器包括兩個SICK雷達(dá)(型號為SICKLM291-S05)、一個4線激光雷達(dá)(型號為IbeoLUX4L)、一個8線激光傳感器(型號為IbeoLUX8L)和一個毫米波雷達(dá)(型號為DelphiESR)。視覺傳感器由3個攝像機(jī)(型號為AVT1394 Pike F-100C)組成,均勻地安裝在前擋風(fēng)玻璃后面。位置/姿態(tài)傳感器由GPS和INS組成(型號為NovAtelSPAN-CPT)。每個傳感器的詳細(xì)描述見表1。
圖6 猛獅智能車的外觀
圖7 猛獅智能車的傳感器部署
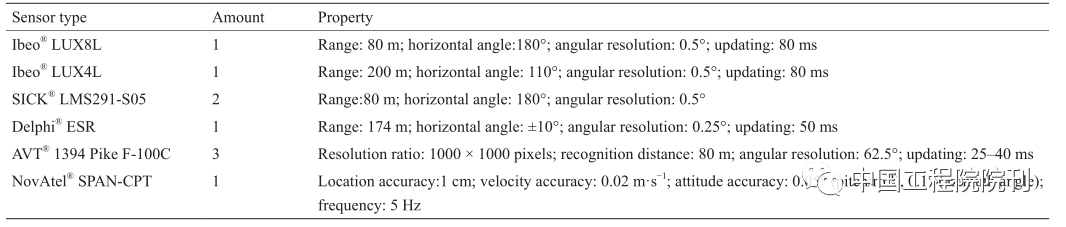
表1 猛獅智能車的傳感器描述
中央控制器由IPC組成(包括英特爾酷睿i7-3520 M2.9 GHz處理器),軟件開發(fā)環(huán)境是Visual Studio 2013。執(zhí)行器包括轉(zhuǎn)向系統(tǒng)、電子液壓制動系統(tǒng)和電子油門控制系統(tǒng)。在原車轉(zhuǎn)向系統(tǒng)的基礎(chǔ)上,轉(zhuǎn)向系統(tǒng)配備了一套獨立的電動助力轉(zhuǎn)向(EPS)系統(tǒng)。在原車液壓制動系統(tǒng)的基礎(chǔ)上,增加了一個電控液壓制動系統(tǒng)和一個獨立的電控液壓系統(tǒng)。該系統(tǒng)與原液壓管道串聯(lián),兩個系統(tǒng)沒有沖突。電子油門控制系統(tǒng)通過對原車電子油門的直接改造來運(yùn)行,以實現(xiàn)車輛的發(fā)動機(jī)控制。執(zhí)行器工作模式、通信接口、波特率和最小執(zhí)行周期如表2所示。
表2 猛獅智能車的執(zhí)行器描述
(二)猛獅智能車試驗結(jié)果
上述硬件架構(gòu)被應(yīng)用于猛獅系列智能車,猛獅系列智能車參加了由中國國家自然科學(xué)基金委員會組織的第三屆至第七屆智能車未來挑戰(zhàn)賽(IVFC)。猛獅系列智能車在第三屆和第五屆比賽中獲得亞軍,并在第四屆、第六屆和第七屆比賽中獲得冠軍。
同時,2012年,基于駕駛腦硬件架構(gòu)的“猛獅3號”智能駕駛車完成了從北京臺湖收費站到天津東麗收費站共114 km的高速全程無人駕駛試驗;2015年8月29日,基于駕駛腦架構(gòu)的全球第一輛無人駕駛大客車完成了鄭州至開封的開放道路無人駕駛測試,順利到達(dá)終點,開啟了大客車無人駕駛的新時代。
五、討論
在長期試驗過程中,我們認(rèn)識到傳感器代替不了大腦,感知代替不了認(rèn)知。無論傳感器有多完善,甚至包括人的感官在內(nèi),都只是有限認(rèn)知。只有代表腦認(rèn)知的駕駛腦才是全局認(rèn)知。駕駛腦的認(rèn)知,不僅融合了感官信息,還融合了大腦中的先驗知識和駕駛經(jīng)驗中的時空關(guān)聯(lián)知識。同時,智能駕駛車輛智能決策也要由駕駛腦完成,而不能簡單基于任何一路傳感器。駕駛決策也不完全基于多路傳感器形成的當(dāng)前和歷史駕駛態(tài)勢,還應(yīng)結(jié)合各種駕駛先驗知識。
六、結(jié)論
基于以駕駛腦為核心的智能駕駛車輛軟件與硬件架構(gòu),決策模塊將不直接與傳感器信息處理模塊發(fā)生關(guān)聯(lián)。通過駕駛認(rèn)知的形式化語言,將駕駛認(rèn)知形式化,由駕駛腦認(rèn)知形成決策。駕駛認(rèn)知的形式化降低了傳感器數(shù)量、類型、安裝位置的變化對整個軟件架構(gòu)的影響,使得軟件架構(gòu)可以在不同傳感器配置車輛平臺上方便地移植。
改編原文:
Deyi Li,Hongbo Gao.A Hardware Platform Framework for an Intelligent Vehicle Based on a Driving Brain[J].Engineering,2018,4(4):464-470.
作者介紹
李德毅,指揮自動化和人工智能專家,中國工程院院士、國際歐亞科學(xué)院院士。
參加了多項電子信息系統(tǒng)重大工程的研制和開發(fā);最早提出控制流—數(shù)據(jù)流圖對理論和一整套用邏輯語言實現(xiàn)的方法;證明了關(guān)系數(shù)據(jù)庫模式和一階謂詞邏輯的對等性,提出云模型和發(fā)現(xiàn)狀態(tài)空間,用于不確定性知識表示和數(shù)據(jù)控制,在智能控制“三級倒立擺動平衡”實驗中取得顯著成效。
責(zé)任編輯:xj
原文標(biāo)題:【峰咖】李德毅院士:基于駕駛腦的智能駕駛車輛硬件平臺架構(gòu)
文章出處:【微信公眾號:機(jī)器人峰會】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
傳感器
+關(guān)注
關(guān)注
2561文章
52415瀏覽量
762866 -
智能駕駛
+關(guān)注
關(guān)注
4文章
2764瀏覽量
49606
原文標(biāo)題:【峰咖】李德毅院士:基于駕駛腦的智能駕駛車輛硬件平臺架構(gòu)
文章出處:【微信號:robotop2025,微信公眾號:每日機(jī)器人峰匯】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
解鎖未來汽車電子技術(shù):軟件定義車輛與區(qū)域架構(gòu)深度解析
VirtualLab:CMOS傳感器仿真
智能駕駛傳感器發(fā)展現(xiàn)狀及發(fā)展趨勢
多通道傳感器接入集中控制頻率溫度 傳感器集線器帶來更多方便
多傳感器融合在自動駕駛中的應(yīng)用趨勢探究

HAL庫在Arduino平臺上的使用
mems傳感器在汽車電子上的應(yīng)用有哪些
車載傳感器主要有哪些傳感器
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
自動駕駛的傳感器技術(shù)介紹
自動駕駛汽車傳感器有哪些
XV7181BB 陀螺儀傳感器在自動駕駛設(shè)備中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論