") 一篇非常新的介紹PyTorch內(nèi)部機(jī)制的文章
一篇非常新的介紹PyTorch內(nèi)部機(jī)制的文章
譯者序:這篇博文是一篇非常新的介紹PyTorch內(nèi)部機(jī)制的文章,作者Edward Z Yang來自于Stanford大學(xué),是PyTorch的核心開發(fā)者之一。文章中介紹了如何閱讀PyTorch源碼和擴(kuò)展PyTorch的技巧。目前講PyTorch底層的文章不多,故將其翻譯出來,才疏學(xué)淺,如有疏漏,歡迎留言討論。 原文鏈接:http://blog.ezyang.com/2019/05/pytorch-internals/ 翻譯努力追求通俗、易懂,有些熟知的名詞沒有進(jìn)行翻譯比如(Tensor, 張量) 部分專有名詞翻譯對照表如下 英文 譯文
| autograde | 自動微分 |
| tensor | 張量(翻譯保持了tensor) |
| layout | 布局(主要講的是數(shù)據(jù)在內(nèi)存中的分布) |
| device | 設(shè)備(比如CPU或者GPU) |
| dtype | 數(shù)據(jù)類型(比如 float, int) |
| kernels | 實(shí)現(xiàn)某個操作的具體代碼(翻譯保持了kernels) |
| operation | 操作(比如加,矩陣相乘) |
| operator | 操作符 |
| metadata | 元數(shù)據(jù) |
| stride | 步長 |
| dimension | 維度 |
| view | 視圖 |
| offset | 偏移量 |
| storage | 存儲 |
| dispatch | 分派 |
| wrap | 封裝 |
| unwrap | 解封裝(翻譯保持了unwrap) |
這篇博文是一篇長論文形式的關(guān)于PyTorch內(nèi)部機(jī)制的演講材料,我于2019年5月14日在PyTorch紐約見面會中進(jìn)行了這場演講。
Intros
大家好!我今天帶來的是關(guān)于PyTorch內(nèi)部機(jī)制的演講
這個演講的受眾是那些已經(jīng)用過PyTorch,問過自己"如果我能給PyTorch做些貢獻(xiàn)豈不美哉"但是又被PyTorch龐大的C++代碼嚇退的人。實(shí)話說:有時候PyTorch的代碼庫確實(shí)又多又雜。這個演講的目的是給你提供一張導(dǎo)向圖:告訴你PyTorch這個"支持自動微分的tensor庫"的基本結(jié)構(gòu),給你介紹一些能夠幫助你在PyTorch代碼庫中暢游的工具和小技巧。我假設(shè)你之前寫過一些PyTorch代碼,但是不需要你對如何實(shí)現(xiàn)一個機(jī)器學(xué)習(xí)庫有過深入的理解。
這個演講分為兩個部分:在第一部分,我將會向你介紹tensor庫的基本概念。我將會從你所熟知的tensor數(shù)據(jù)類型談起,并且詳細(xì)討論這個數(shù)據(jù)類型提供了什么,作為幫助你理解它是如何實(shí)現(xiàn)的指引。如果你是一個PyTorch的重度用戶,大部分內(nèi)容都是你所熟知的。我們也將會討論擴(kuò)展PyTorch的"三要素":布局(layout),設(shè)備(device)和數(shù)據(jù)類型(dtype),這三個要素指導(dǎo)著我們選擇哪種方式擴(kuò)展Tensor類。
在紐約的現(xiàn)場演講中,我跳過了關(guān)于自動微分(autograde)的部分,不過我在這個博文中簡要的討論了它們。 第二部分包含了PyTorch源碼的細(xì)節(jié)。我會告訴你如何在復(fù)雜autograd的代碼中找到邏輯,哪些代碼是重要的,哪些代碼是老舊的,以及所有PyTorch提供的易用工具來幫助你編寫kernels。
Concepts
Tensor/Storage/Strides
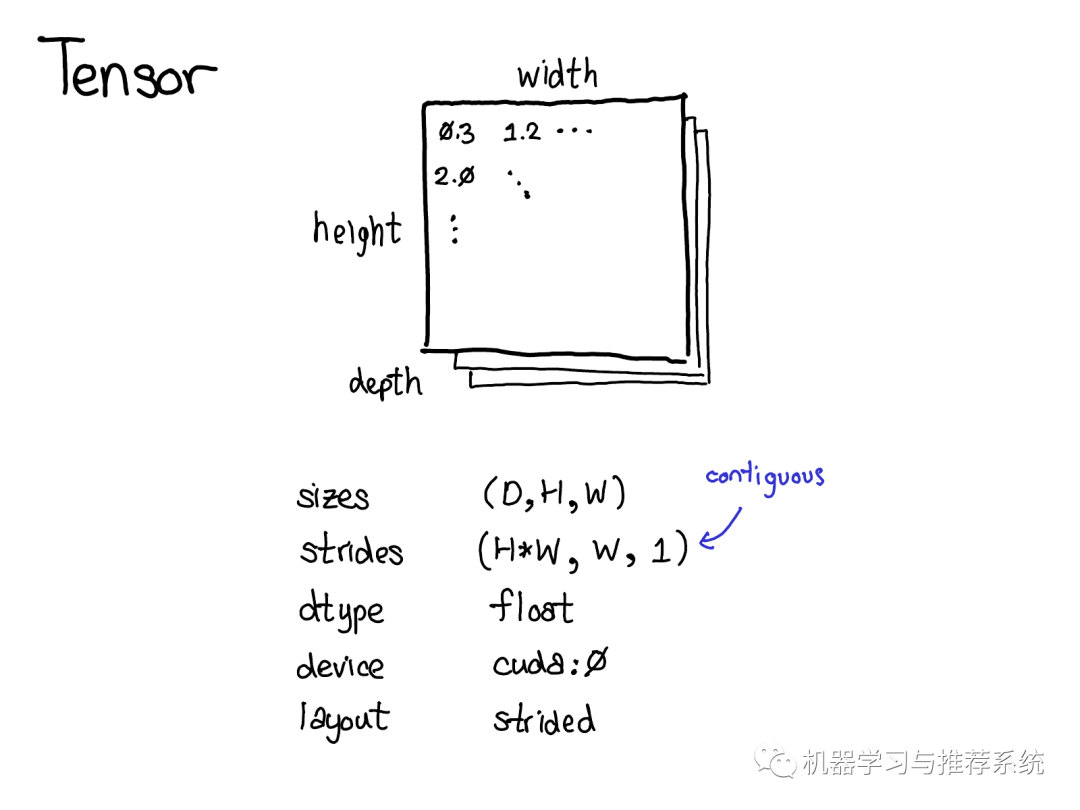
Tensor 是PyTorch的核心數(shù)據(jù)結(jié)構(gòu)。你可能對tensor的概念已經(jīng)相當(dāng)了解了:它是包含若干個標(biāo)量(標(biāo)量可以是各種數(shù)據(jù)類型如浮點(diǎn)型、整形等)的n-維的數(shù)據(jù)結(jié)構(gòu)。我們可以認(rèn)為tensor包含了數(shù)據(jù)和元數(shù)據(jù)(metadata),元數(shù)據(jù)用來描述tensor的大小、其包含內(nèi)部數(shù)據(jù)的類型、存儲的位置(CPU內(nèi)存或是CUDA顯存?)
也有一些你可能不太熟悉的元數(shù)據(jù):步長(the stride),步長實(shí)際上是PyTorch的一個亮點(diǎn),所以值得花點(diǎn)時間好好討論一下它。
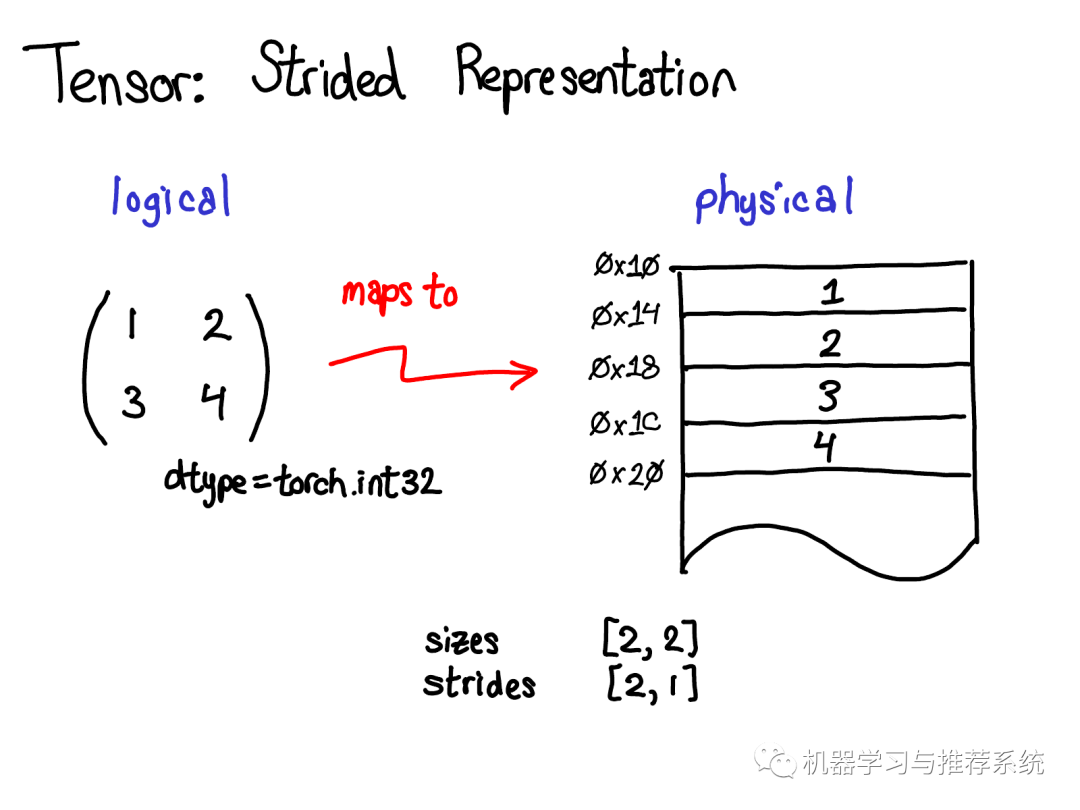
Tensor是一個數(shù)學(xué)概念。當(dāng)用計算機(jī)表示數(shù)學(xué)概念的時候,通常我們需要定義一種物理存儲方式。最常見的表示方式是將Tensor中的每個元素按照次序連續(xù)的在內(nèi)存中鋪開(這是術(shù)語contiguous的來歷),將每一行寫到相應(yīng)內(nèi)存位置里。如上圖所示,假設(shè)tensor包含的是32位的整數(shù),因此每個整數(shù)占據(jù)一塊物理內(nèi)存,每個整數(shù)的地址都和上下相鄰整數(shù)相差4個字節(jié)。為了記住tensor的實(shí)際維度,我們需要將tensor的維度大小記錄在額外的元數(shù)據(jù)中。 那么,步長在物理表示中的作用是什么呢?
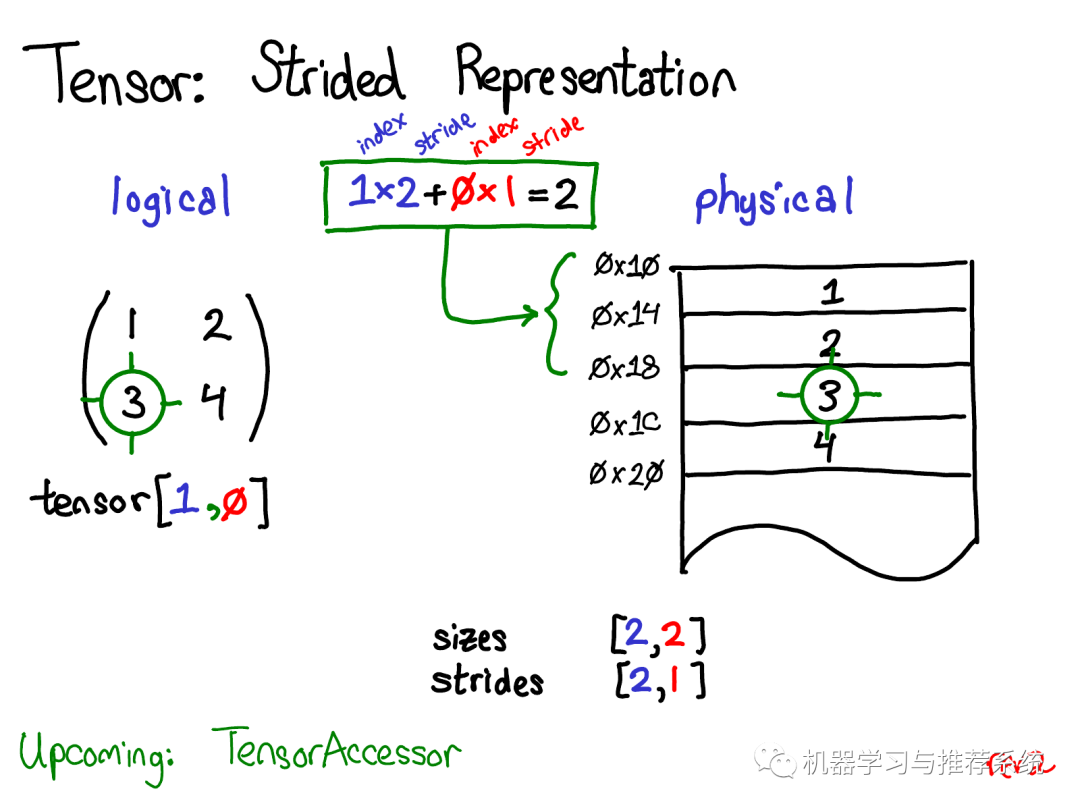
假設(shè)我想要訪問位于tensor [1, 0]位置處的元素,如何將這個邏輯地址轉(zhuǎn)化到物理內(nèi)存的地址上呢?步長就是用來解決這樣的問題:當(dāng)我們根據(jù)下標(biāo)索引查找tensor中的任意元素時,將某維度的下標(biāo)索引和對應(yīng)的步長相乘,然后將所有維度乘積相加就可以了。在上圖中我將第一維(行)標(biāo)為藍(lán)色,第二維(列)標(biāo)為紅色,因此你能夠在計算中方便的觀察下標(biāo)和步長的對應(yīng)關(guān)系。
求和返回了一個0維的標(biāo)量2,而內(nèi)存中地址偏移量為2的位置正好儲存了元素3。 (在后面的演講中,我會討論TensorAccessor,一個方便的類來處理下標(biāo)到地址的計算。當(dāng)你使用TensorAccessor而不是原始的指針的時候,這個類能隱藏底層細(xì)節(jié),自動幫助你完成這樣的計算) 步長是實(shí)現(xiàn)PyTorch視圖(view)的根基。例如,假設(shè)我們想要提取上述tensor的第二行:
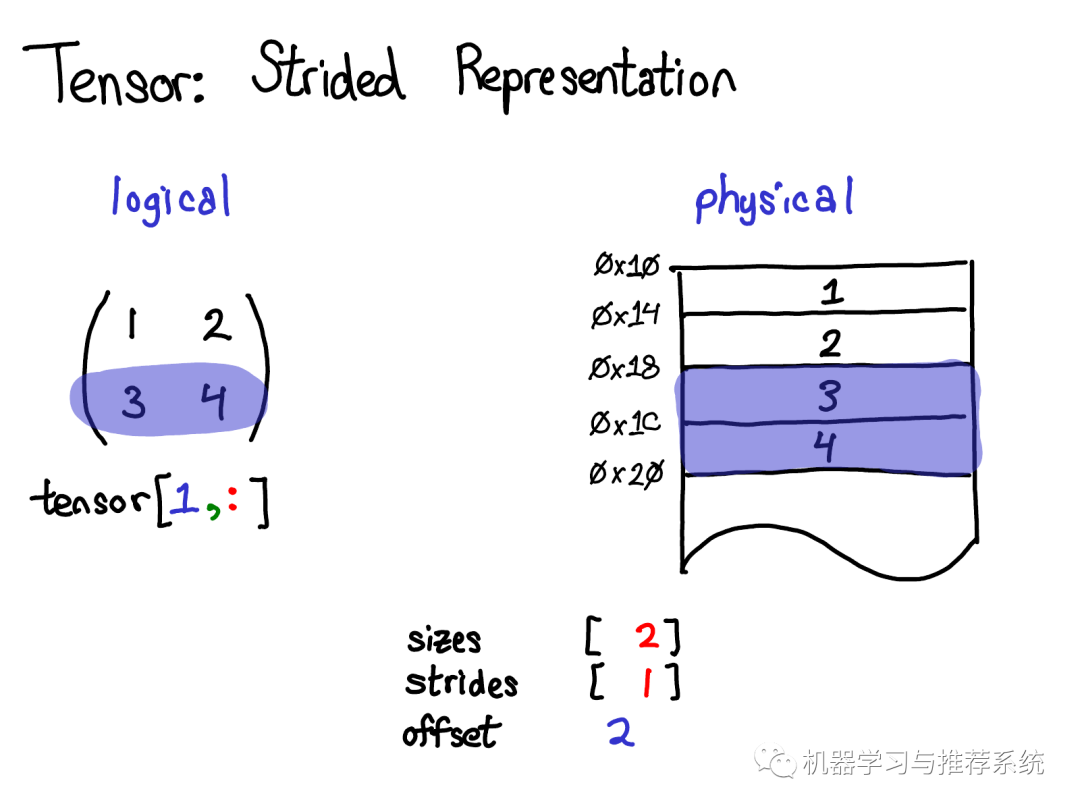
使用高級索引技巧,我只需要寫成tensor[1, :] 來獲取這一行。重要的事情是:這樣做沒有創(chuàng)建一個新的tensor;相反,它只返回了原tensor底層數(shù)據(jù)的另一個視圖。這意味著如果我編輯了這個視圖中的數(shù)據(jù),變化也會反應(yīng)到原tensor上。在這個例子中,不難看出視圖是怎么做的:3和4存儲在連續(xù)的內(nèi)存中,我們所要做的是記錄一個偏移量(offset),用來表示新的視圖的數(shù)據(jù)開始于原tensor數(shù)據(jù)自頂向下的第二個。(每一個tensor都會記錄一個偏移量,但是大多數(shù)時候他們都是0,我在圖片中忽略了這樣的例子)
來自于演講的問題:如果我給一個tensor生成了一個視圖,我怎樣釋放掉原tensor的內(nèi)存? 回答:你必須要復(fù)制一份這個視圖,以切斷和原tensor物理內(nèi)存的關(guān)系。除此之外,別無選擇。順便提一下,如果你之前寫過Java,拿到一個字符串的子字符串有相似的問題,因?yàn)槟J(rèn)情況下不會產(chǎn)生數(shù)據(jù)的復(fù)制,因此子字符串關(guān)聯(lián)著(可能非常大的)原字符串。這個問題在Java 7u6被修復(fù)了。
一個更有趣的例子是假設(shè)我想要拿第一列的數(shù)據(jù):
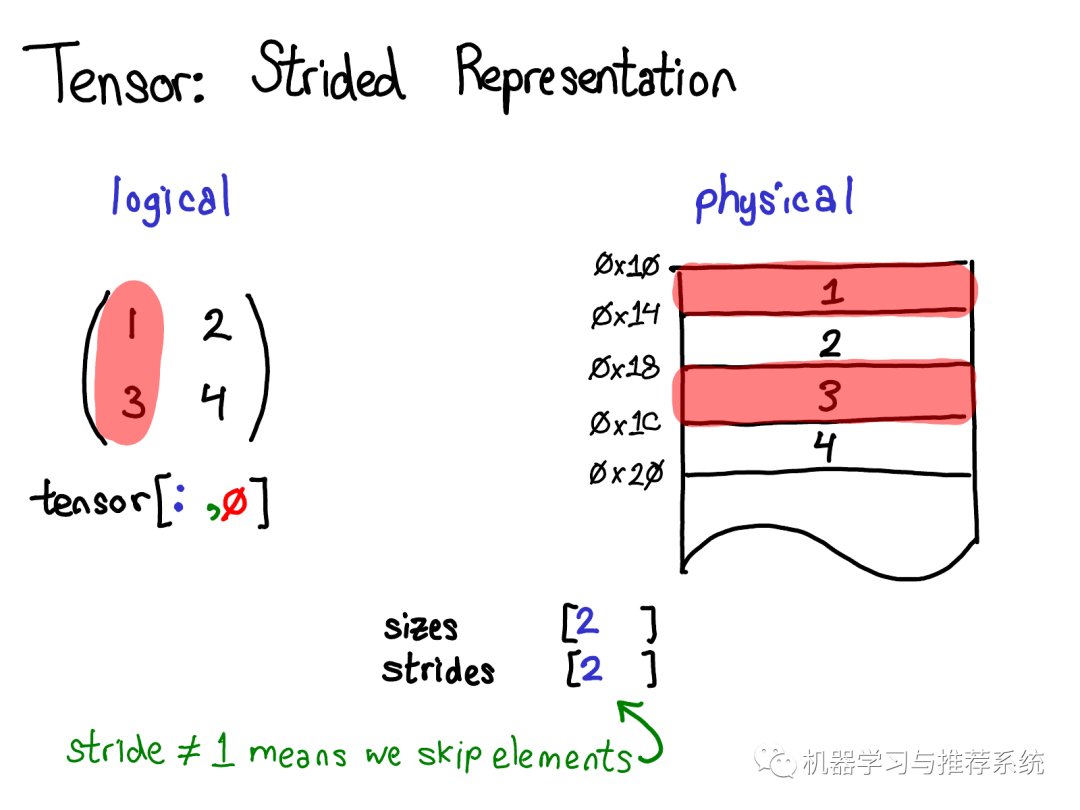
物理內(nèi)存中處于第一列的元素是不連續(xù)的:每個元素之間都隔著一個元素。這里步長就有用武之地了:我們將步長指定為2,表示在當(dāng)前元素和下一個你想訪問的元素之間, 你需要跳躍2個元素(跳過1個元素)。 步長表示法能夠表示所有tensor上有趣的視圖,如果你想要進(jìn)行一些嘗試,見步長可視化。 讓我們退一步想想如何實(shí)現(xiàn)這種機(jī)制(畢竟,這是一個關(guān)于內(nèi)部機(jī)制的演講)。要取得tensor上的視圖,我們得對tensor的的邏輯概念和tensor底層的物理數(shù)據(jù)(稱為存儲 storage)進(jìn)行解耦:
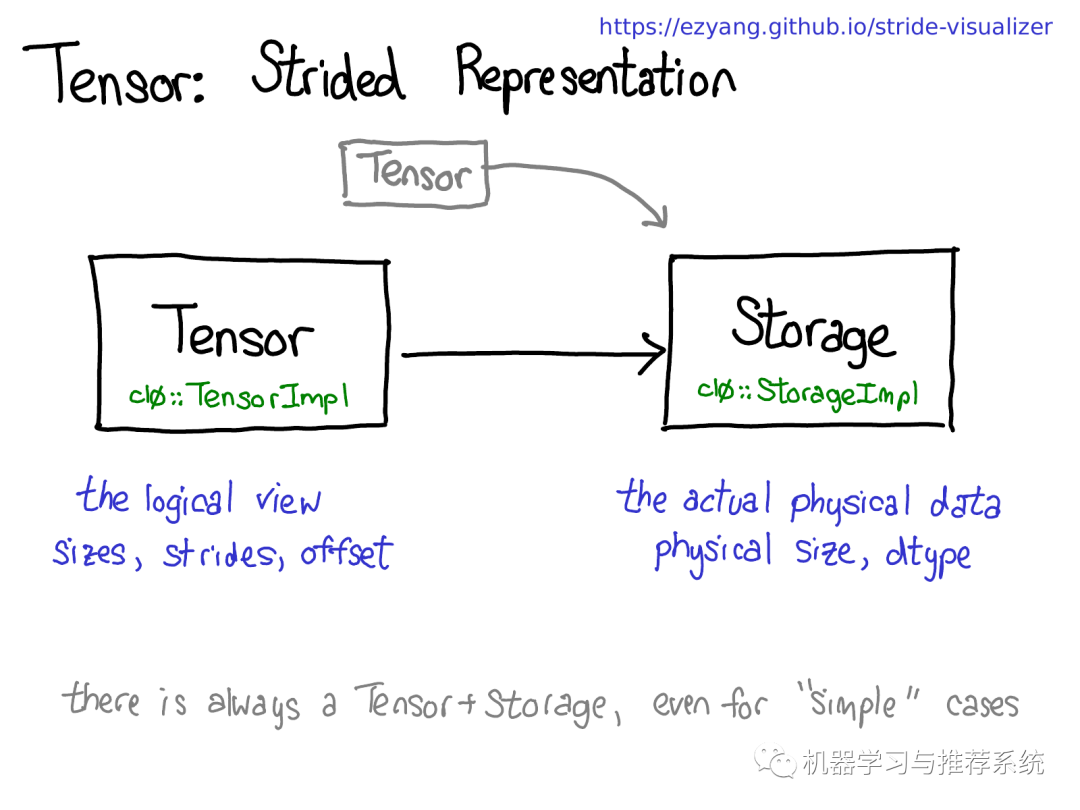
一個存儲可能對應(yīng)多個tensor。存儲定義了tensor的數(shù)據(jù)類型和物理大小,而每個tensor記錄了自己的大小(size),步長(stride)和偏移(offset),這些元素定義了該tensor如何對存儲進(jìn)行邏輯解釋。 值得注意的是即使對于一些不需要用到存儲的"簡單"的情況(例如,通過torch.zeros(2,2)分配一個內(nèi)存連續(xù)的tensor),總是存在著Tensor-Storage對。
順便提一下,我們也對改進(jìn)這樣的模型很感興趣。相比于有一個獨(dú)立的存儲,只基于現(xiàn)有tensor定義一個視圖。這有一點(diǎn)點(diǎn)復(fù)雜,但是優(yōu)點(diǎn)是可以更加直接的表示連續(xù)tensor,而不需要tensor到存儲的轉(zhuǎn)化。這樣的變化將會使PyTorch的內(nèi)部表示更加像Numpy。
我們對于tensor的數(shù)據(jù)布局(data layout)做了相當(dāng)多的討論,(有人會說,如果你能夠?qū)?shù)據(jù)底層表示搞清楚,剩下的一切就順理成章了)。但是我覺得還是有必要簡要的探討一下tensor上的操作(operations)是如何實(shí)現(xiàn)的。抽象來說,當(dāng)你調(diào)用torch.mm的時候,會產(chǎn)生兩種分派(dispatch):
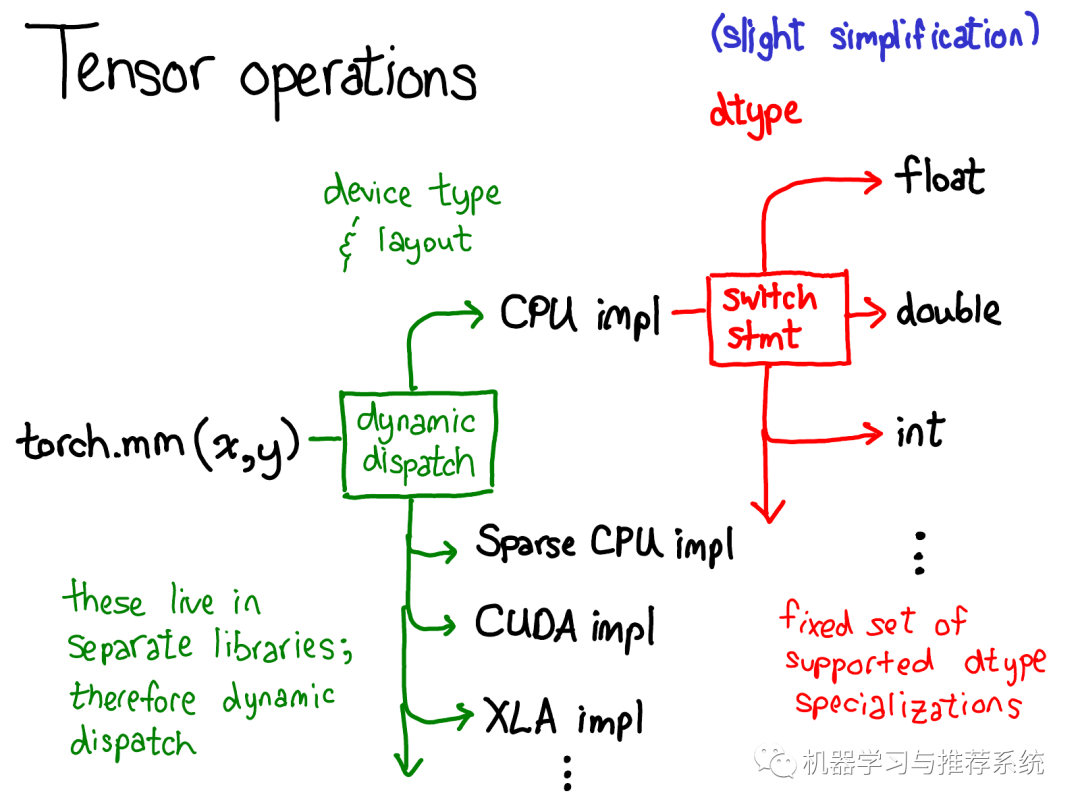
第一種分派基于設(shè)備類型(device type)和tensor的布局(layout of a tensor),例如這個tensor是CPU tensor還是CUDA tensor;或者,這個tensor是基于步長的(strided) tensor 還是稀疏tensor。這是一種動態(tài)分派的過程:使用一個虛函數(shù)調(diào)用實(shí)現(xiàn)(虛函數(shù)的細(xì)節(jié)將在教程的后半部分詳述)。這種動態(tài)分派是必要的因?yàn)轱@然CPU和GPU實(shí)現(xiàn)矩陣乘法的方式不同。
這種分派是動態(tài)的因?yàn)閷?yīng)的kernels(理解為具體的實(shí)現(xiàn)代碼)可能存在于不同的庫中(e.g. libcaffe2.so 或 libcaffe2_gpu.so),如果你想要訪問一個沒有直接依賴的庫,你就得動態(tài)的分派你的函數(shù)調(diào)用到這些庫中。 第二種分派基于tensor的數(shù)據(jù)類型(dtype)。這種依賴可以通過簡單的switch語句解決。稍稍思考,這種分派也是有必要的:CPU 代碼(或者GPU代碼)實(shí)現(xiàn)float類型矩陣乘法和int類型矩陣乘法也會有差異,因此每種數(shù)據(jù)類型(dtype)都需要不同的kernels。 如果你想要理解operators在PyTorch中是如何調(diào)用的,上面這張圖也許最應(yīng)該被記住。當(dāng)講解代碼的時候我們會再回到這張圖。
Layout/Device/Dtype

既然我們一直在討論Tensor,我還想花點(diǎn)時間討論下tensor擴(kuò)展(extension)。畢竟,日常生活中遇到的tensor大部分都并不是稠密的浮點(diǎn)數(shù)tensor。很多有趣的擴(kuò)展包括XLA tensors,quantized tensors,或者M(jìn)KL-DNN tensors。作為一個tensor library我們需要考慮如何融合各種類型的tensors。
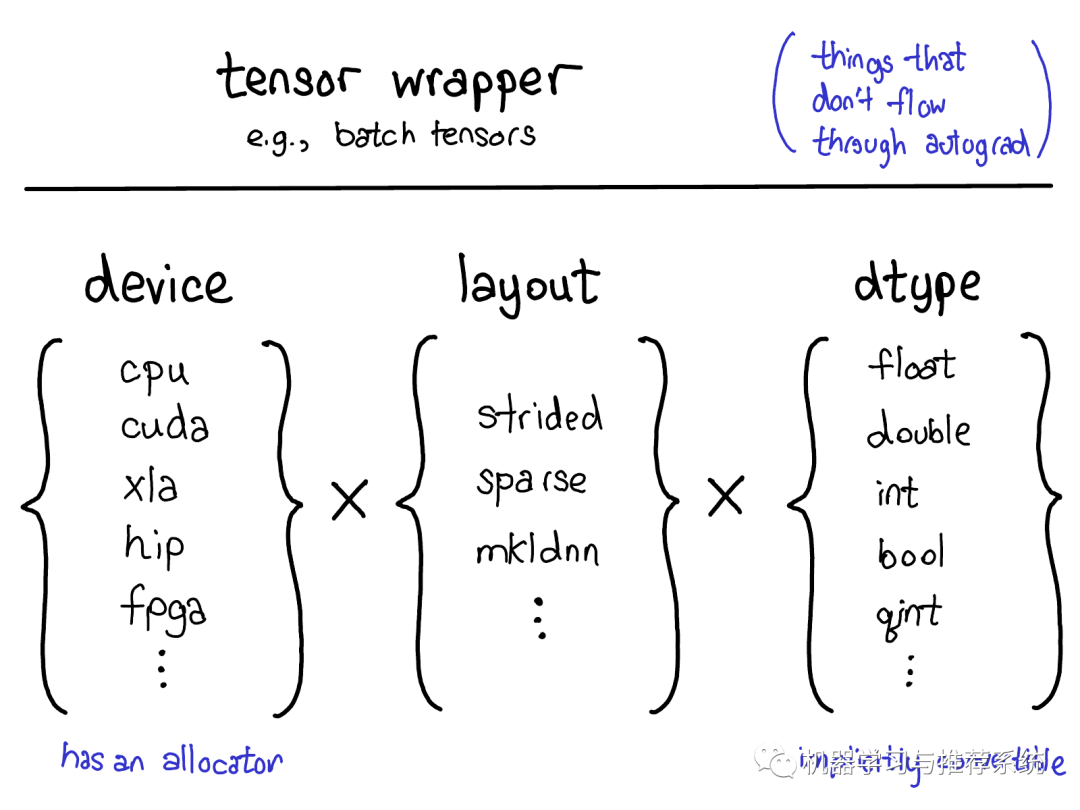
目前來說PyTorch的擴(kuò)展模型提供了4種擴(kuò)展方法。首先,能夠唯一確定Tensor類型的"三要素"是:
設(shè)備類型(The device) 設(shè)備類型描述了tensor的到底存儲在哪里,比如在CPU內(nèi)存上還是在NVIDIA GPU顯存上,在AMD GPU(hip)上還是在TPU(xla)上。不同設(shè)備的特征是它們有自己的存儲分配器(allocator),不同設(shè)備的分配器不能混用。
內(nèi)存布局(The layout) 描述了我們?nèi)绾谓忉屵@些物理內(nèi)存。常見的布局是基于步長的tensor(strided tensor)。稀疏tensor有不同的內(nèi)存布局,通常包含一對tensors,一個用來存儲索引,一個用來存儲數(shù)據(jù);MKL-DNN tensors 可能有更加不尋常的布局,比如塊布局(blocked layout),這種布局難以被簡單的步長(strides)表達(dá)。
數(shù)據(jù)類型(The dtype) 數(shù)據(jù)類型描述tensor中的每個元素如何被存儲的,他們可能是浮點(diǎn)型或者整形,或者量子整形。
如何你想要增加一種PyTorch tensor類型(順便說下,請聯(lián)系我們?nèi)绻阏娴南胍鲞@個!這個目前來說不是那么容易的事情),你應(yīng)該想想你要擴(kuò)展上面提到的哪一個決定張量類型的因素("三要素")。目前為止,并不是所有的組合都有對應(yīng)的kernel(比如FPGA上稀疏量子張量的計算就沒有現(xiàn)成的kernel),但是原則上來說大部分的組合都可能是道理的,因此至少在一定程度上我們支持它們。
還有一種方法可以用來擴(kuò)展Tensor,即寫一個tensor的wrapper類,實(shí)現(xiàn)你自己的對象類型(object type)。聽起來很顯然,但是很多人卻在該用wrapper擴(kuò)展的時候卻選擇了擴(kuò)展上述三種要素。wrapper類擴(kuò)展的一個非常好的優(yōu)點(diǎn)是開發(fā)非常簡單。 什么時候我們應(yīng)該寫一個tensor wrapper或者擴(kuò)展PyTorch tensor?一個至關(guān)重要的測試是在反向自動求導(dǎo)的過程中你是否需要傳遞該tensor。
例如通過這樣的測試,我們就可以知道應(yīng)該通過擴(kuò)展PyTorch的方式實(shí)現(xiàn)稀疏tensor,而不是建立一個包含索引tensor和值tensor的Python對象(wrapper方式):因?yàn)楫?dāng)在一個包含Embedding的網(wǎng)絡(luò)上做優(yōu)化的時候,我們希望生成的梯度也是稀疏的。
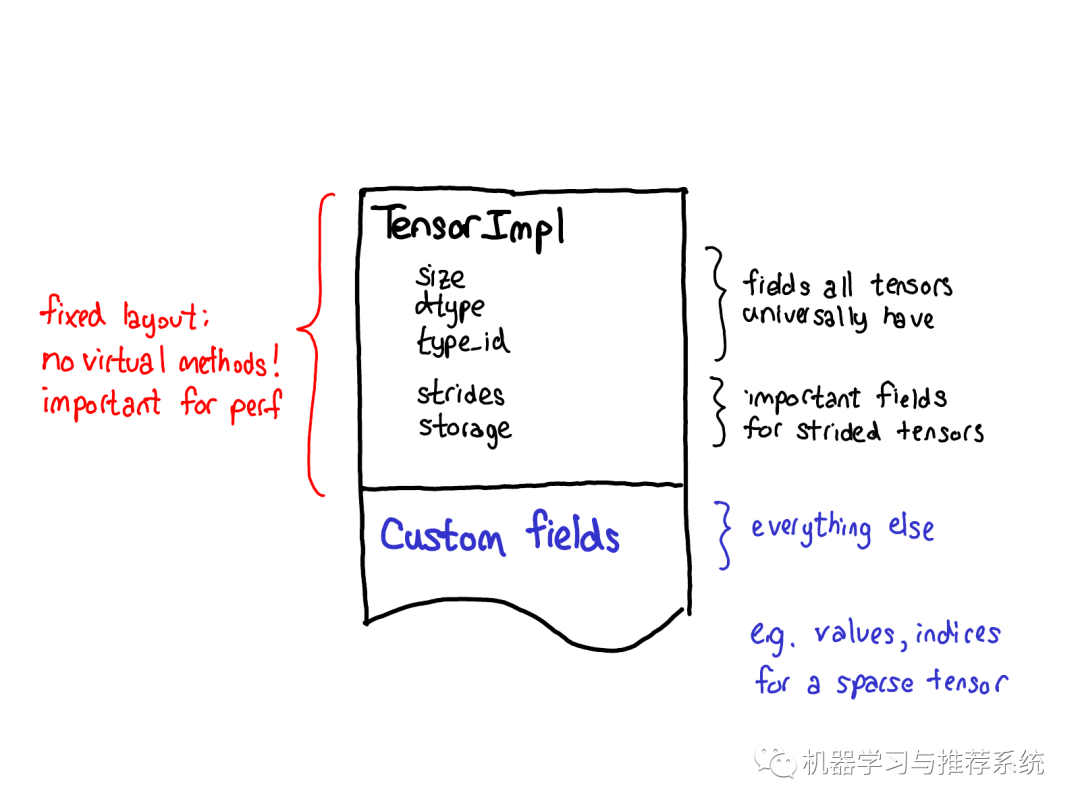
我們關(guān)于tensor擴(kuò)展的哲學(xué)也對tensor自身的數(shù)據(jù)布局產(chǎn)生著一定的影響。我們始終希望tensor結(jié)構(gòu)能有個固定的布局:我們不希望一些基礎(chǔ)的operator(這些operator經(jīng)常被調(diào)用),如size of tensor需要一個虛分派 (virtual dispatches)。因此當(dāng)你觀察Tensor實(shí)際的布局的時候(定義在 TensorImpl 結(jié)構(gòu)體中),一些被我們認(rèn)為是所有類型tensor都會有的字段定義在前面,隨后跟著一些strided tensors特有的字段(我們也認(rèn)為它們很重要),最后才是特定類型tensor的獨(dú)有字段,比如稀疏tensor的索引和值。
Autograd
上面講述的都是tensor相關(guān)的東西,不過如果Pytorch僅僅提供了Tensor,那么它不過是numpy的一個克隆。PyTorch 發(fā)布時一個區(qū)別性的特征是提供了自動微分機(jī)制(現(xiàn)在我們有了其他很酷的特性包括TorchScript;但是當(dāng)時,自動微分是僅有的區(qū)別點(diǎn)) 自動微分到底做了什么呢?自動微分是訓(xùn)練神經(jīng)網(wǎng)絡(luò)的一種機(jī)制:
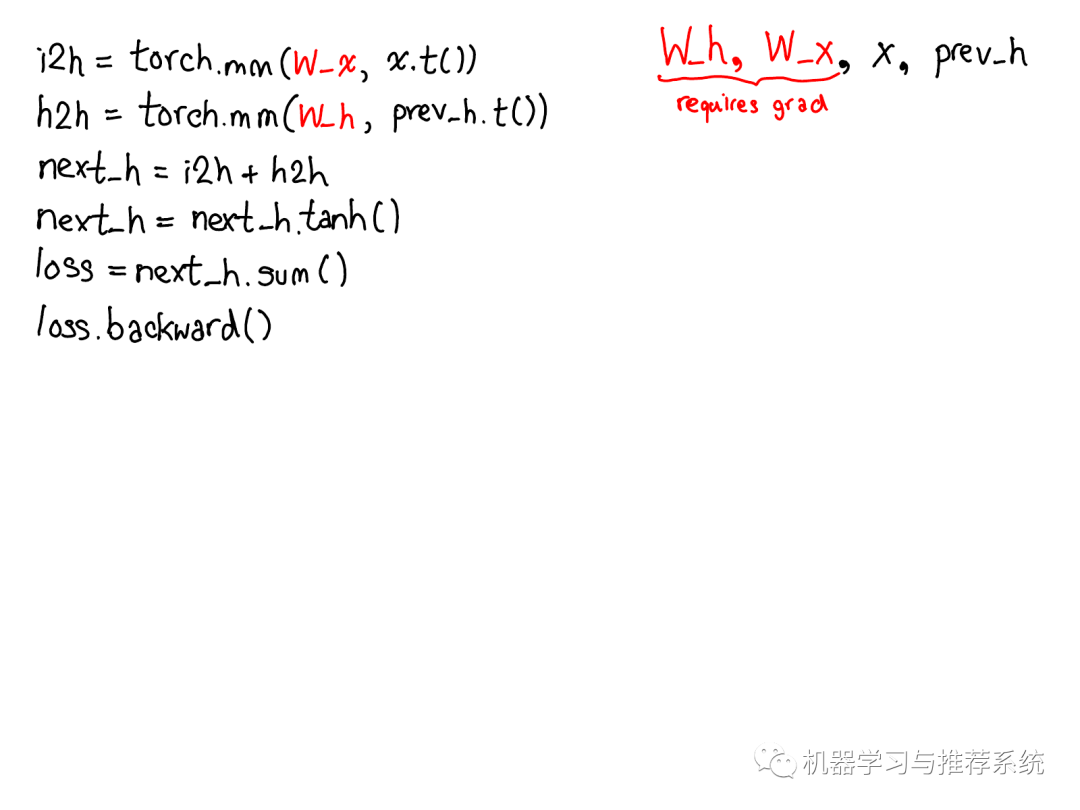
…下面這張圖補(bǔ)充了計算loss的gradients所需要的代碼:
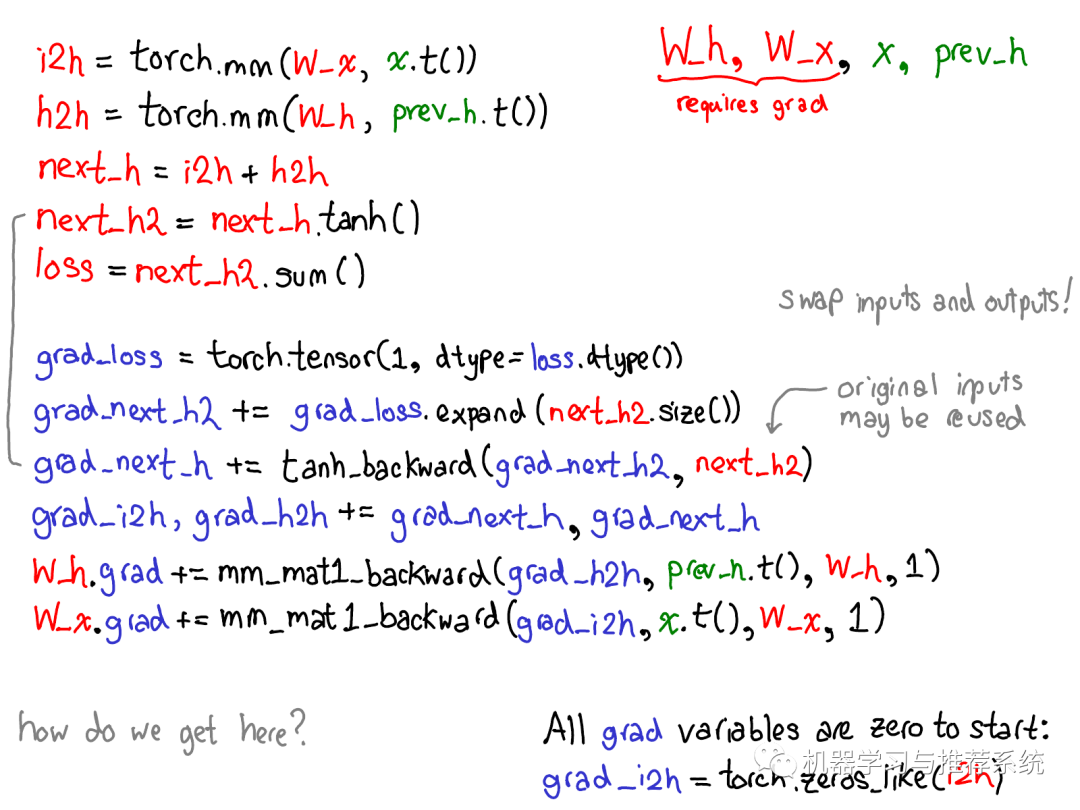
請花一點(diǎn)時間學(xué)習(xí)上面這張圖。有一些東西需要展開來講;下面列出了哪些東西值得關(guān)注:
首先請忽略掉那些紅色和藍(lán)色的代碼。PyTorch實(shí)現(xiàn)了reverse-mode automatic differentiation (反向模式自動微分),意味著我們通過反向遍歷計算圖的方式計算出梯度。注意看變量名:我們在紅色代碼區(qū)域的最下面計算了loss;然后,在藍(lán)色代碼區(qū)域首先我們計算了grad_loss。loss 由 next_h2計算而來,因此我們計算grad_next_h2。嚴(yán)格來講,這些以grad_開頭的變量其實(shí)并不是gradients;他們實(shí)際上是Jacobian矩陣左乘了一個向量,但是在PyTorch中我們就叫它們grad,大部分人都能理解其中的差異。
即使代碼結(jié)構(gòu)相同,代碼的行為也是不同的:前向(forwards)的每一行被一個微分計算代替,表示對這個前向操作的求導(dǎo)。例如,tanh操作符變成了tanh_backward操作符(如上圖最左邊的綠線所關(guān)聯(lián)的兩行所示)。前向和后向計算的輸入和輸出顛倒過來:如果前向操作生成了next_h2,那么后向操作取grad_next_h2作為輸入。
概述之,自動微分做了下圖所示的計算,不過實(shí)質(zhì)上沒有生成執(zhí)行這些計算所需的代碼。PyTorch 自動微分不會做代碼到代碼的轉(zhuǎn)換工作(即使PyTorch JIT確實(shí)知道如何做符號微分(symbolic differentiation))。
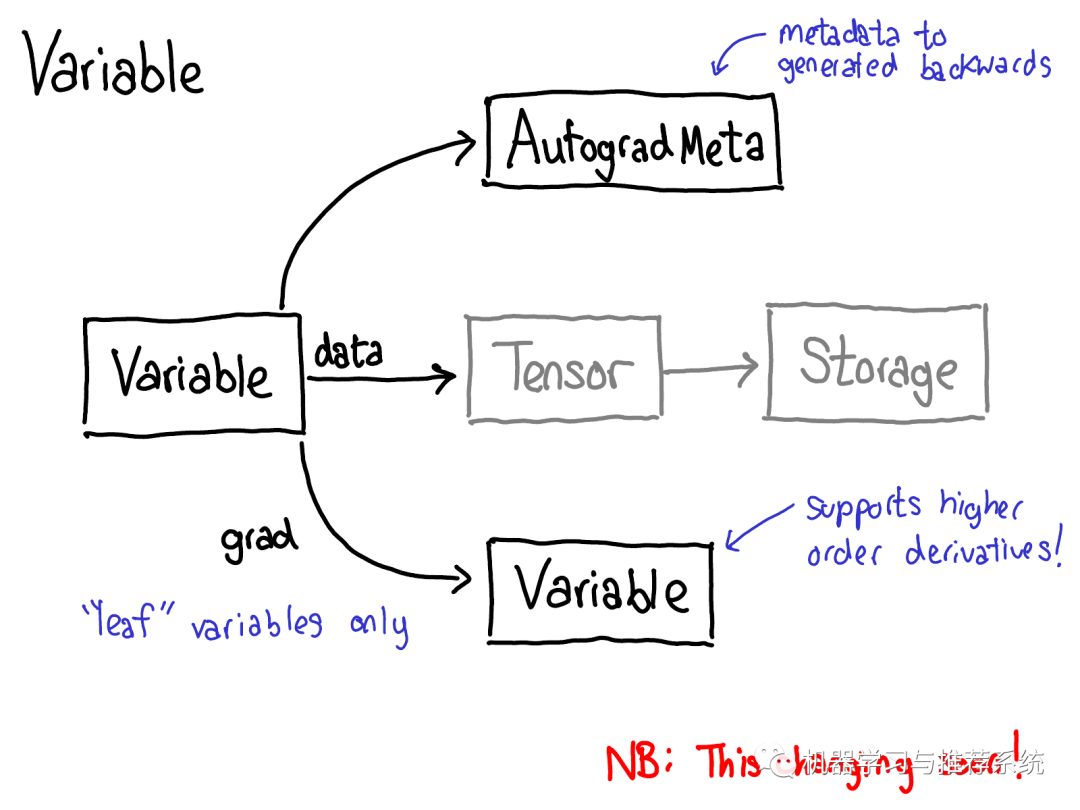
為了實(shí)現(xiàn)這個,當(dāng)我們在tensor上調(diào)用各種operations的時候,一些元數(shù)據(jù)(metadata)也需要被記錄下來。讓我們調(diào)整一下tensor數(shù)據(jù)結(jié)構(gòu)的示意圖:現(xiàn)在不僅僅單單一個tensor指向storage,我們會有一個封裝著這個tensor和更多信息(自動微分元信息(AutogradeMeta))的變量(variable)。這個變量所包含的信息是用戶調(diào)用loss.backward()執(zhí)行自動微分所必備的。 順便我們也更新下分派的圖:
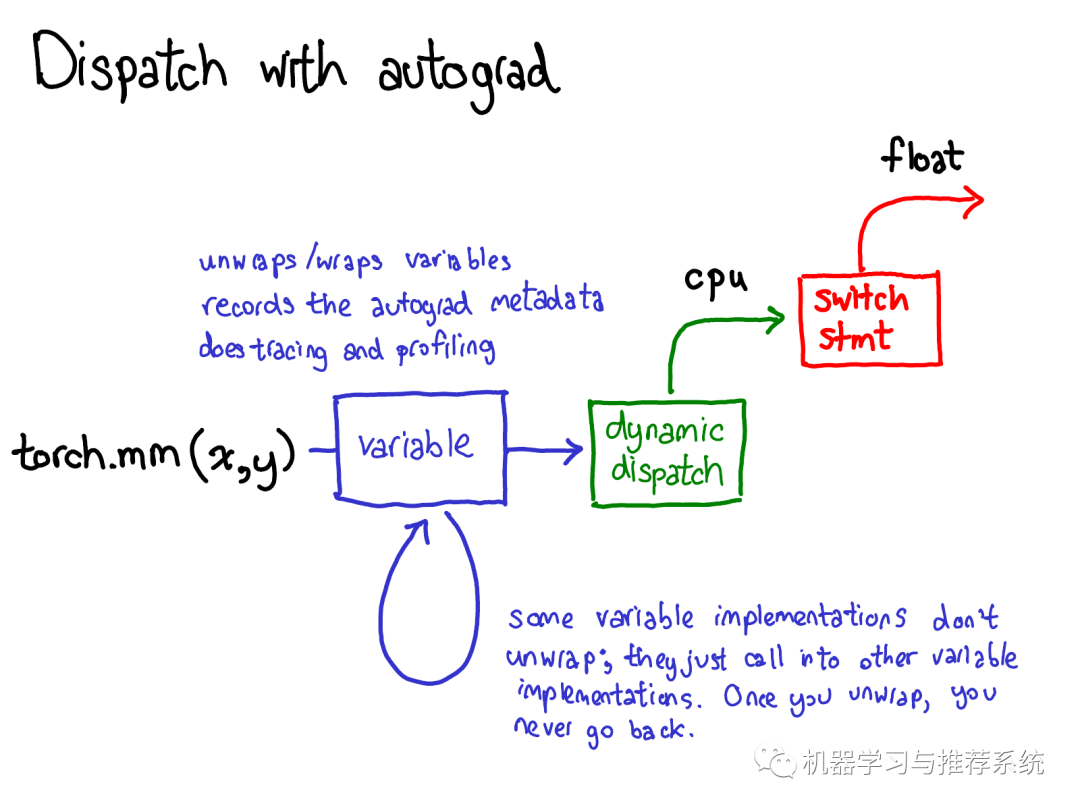
在將計算分派到CPU或者CUDA的具體實(shí)現(xiàn)之前,變量也要進(jìn)行分派,這個分派的目的是取出變量內(nèi)部封裝的分派函數(shù)的具體實(shí)現(xiàn)(上圖中綠色部分),然后再將結(jié)果封裝到變量里并且為反向計算記錄下必要的自動微分元信息。 當(dāng)然也有其他的實(shí)現(xiàn)沒有unwrap操作;他們僅僅調(diào)用其他的變量實(shí)現(xiàn)。你可能會花很多時間在變量的調(diào)用棧中跳轉(zhuǎn)。然后,一旦某個變量unwrap并進(jìn)入了非變量的tensor域,變量調(diào)用棧就結(jié)束了,你不會再回到變量域,除非函數(shù)調(diào)用結(jié)束并且返回。
Mechanics
到此我們已經(jīng)討論了足夠的概念了,現(xiàn)在來看看具體的代碼實(shí)現(xiàn)。
PyTorch的源碼包含許多文件目錄,CONTRIBUTING 文件里給這些目錄做了詳細(xì)的解釋,不過實(shí)話說,你只需要關(guān)注4個目錄:
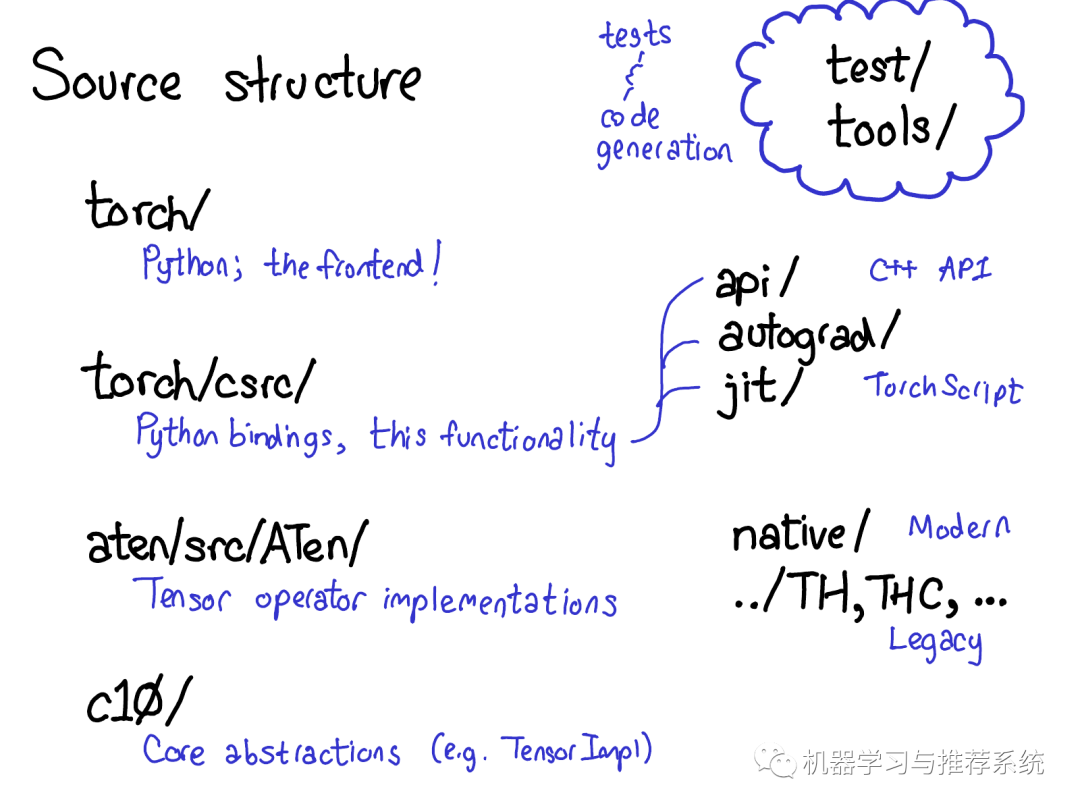
首先,torch/包含了你最熟悉的部分:你在代碼中引入并使用的Python 模塊(modules),這里都是Python代碼,容易修改起來做各種小實(shí)驗(yàn),然后,暗藏在這些表層代碼的下面是:
torch/csrc/,這部分C++代碼實(shí)現(xiàn)了所謂的PyTorch前端(the frontend of PyTorch)。具體來說,這一部分主要橋接了Python邏輯的C++的實(shí)現(xiàn),和一些PyTorch中非常重要的部分,比如自動微分引擎(autograd engine)和JIT編譯器(JIT compiler)。
aten/,是"A Tensor Library"的縮寫,是一個C++庫實(shí)現(xiàn)了Tensor的各種operations。如果你需要查找一些實(shí)現(xiàn)kernels的代碼,很大幾率上他們在aten/文件夾里。ATen 內(nèi)對operators的實(shí)現(xiàn)分成兩類,一種是現(xiàn)代的C++實(shí)現(xiàn)版本,另一種是老舊的C實(shí)現(xiàn)版本,我們不提倡你花太多的時間在C實(shí)現(xiàn)的版本上。
c10/ ,是一個來自于Caffe2 和 A”Ten“的雙關(guān)語(Caffe 10),其中包含了PyTorch的核心抽象,Tensor和Storage數(shù)據(jù)結(jié)構(gòu)的實(shí)際實(shí)現(xiàn)部分。
有如此多的地方看源碼,我們也許應(yīng)該精簡一下目錄結(jié)構(gòu),但目前就是這樣。如果你做一些和operators相關(guān)的工作,你將花大部分時間在aten上。
Operator call stack
下面我們來看看實(shí)踐中這些分離的代碼分別用在那些地方:
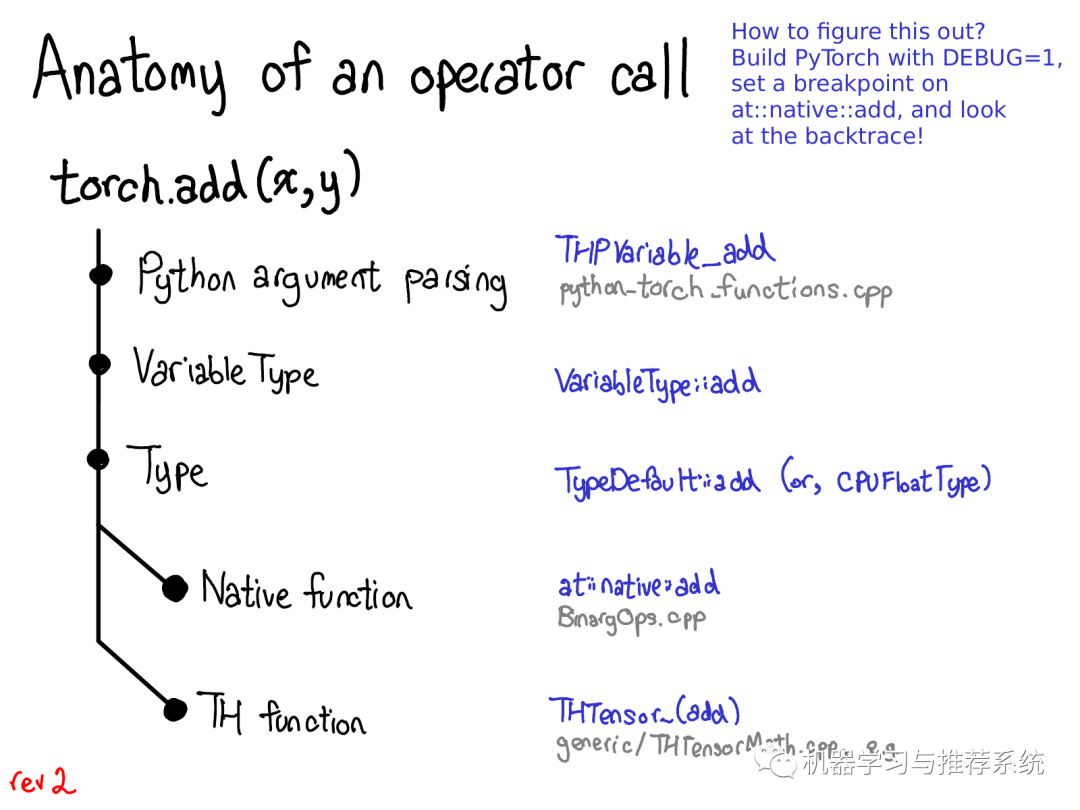
(譯注:下面這一部分需要對C++的機(jī)制有相當(dāng)?shù)牧私猓热缣摵瘮?shù)調(diào)用等等,我添加了一些自己的理解,盡力翻譯得易懂一些,但是不保證完全正確,原文鏈接供參考) 當(dāng)你調(diào)用一個函數(shù)比如torch.add的時候,會發(fā)生哪些事情?如果你記得我們之前討論過的分派機(jī)制,你的腦海中會浮現(xiàn)一個基本的流程:
我們將會從Python 代碼轉(zhuǎn)到 C++代碼(通過解析Python調(diào)用的參數(shù)) (譯注:解析調(diào)用參數(shù)下面代碼中有例子)
處理變量分派(VariableType到Type),順便說一下,這里的Type和程序語言類型沒有關(guān)系,只是在分派中我們這么叫它) (譯注:這一部分博文中沒有討論,下面作者也澄清了這是個疏忽,所以忽略就好了)
處理 設(shè)備類型/布局 分派(Type) (譯注:這一部分討論)
找到實(shí)際上的kernel,可能是一個現(xiàn)代的函數(shù)(modern native funciton),可能是一個老舊的函數(shù)(legacy TH funciton, TH 后面會解釋) (譯注:現(xiàn)代的函數(shù)指C++代碼,老舊的多指C代碼,后面有詳細(xì)討論。)
每一個步驟具體對應(yīng)到一些代碼。讓我們剖析這一部分代碼:
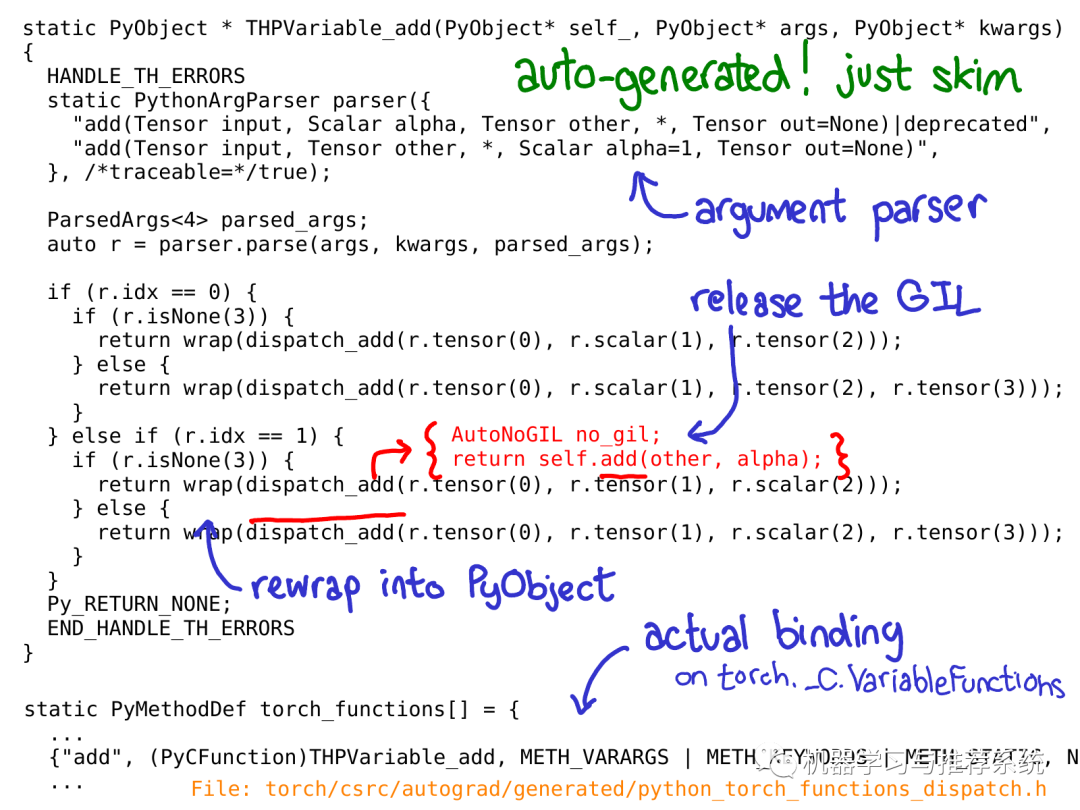
上面的C++代碼展示了分派具體怎樣實(shí)現(xiàn)的,我們以一個C實(shí)現(xiàn)的Python function為例子 (譯注:即下面的THPVariable_add, 以TH開頭的大都是C代碼,后文會介紹),這種實(shí)現(xiàn)在Python代碼中我們會通過類似這樣語句調(diào)用: torch._C.VariableFunctions.add.THPVariable_add。 要強(qiáng)調(diào)的是上面這段代碼是自動生成的。你不會在GitHub repository中搜索到它們,因此你必須得從源碼構(gòu)建PyTorch才能查看到它們。另一個重要的事實(shí)是,你不需要深入地了解這段代碼干了什么;簡單的掃一遍代碼并且對大概的思路有個了解就足夠了。
如上圖,我用藍(lán)色標(biāo)注了一些最重要的部分:如你所見,PythonArgParser class 用來從Python (譯注:Python add方法)的 args和kwargs中生成C++ parser對象,(譯注:通過parser對象的parse方法可以得到一個r對象,r里封裝了左操作數(shù)r.tensor(0),操作符r.scalar(1)和右操作數(shù)r.tensor(1),見上面的代碼) 然后我們調(diào)用dispatch_add函數(shù)(上圖紅色所示),它釋放了Python的全局解釋器鎖(global interpreter lock) 然后調(diào)用一個一般方法作用到C++ tensor self上(譯注:self tensor是C++ Tensor類的對象,C++ Tensor類見下面這張圖)。當(dāng)這個方法返回時,我們重新將Tensor封裝回Python object。 (到此為止,ppt上有個疏漏:我應(yīng)該向你展示關(guān)于Variable dispatch的代碼。目前還沒修復(fù)這個部分。你可以想象奇妙的魔法發(fā)生后,我們到了...)
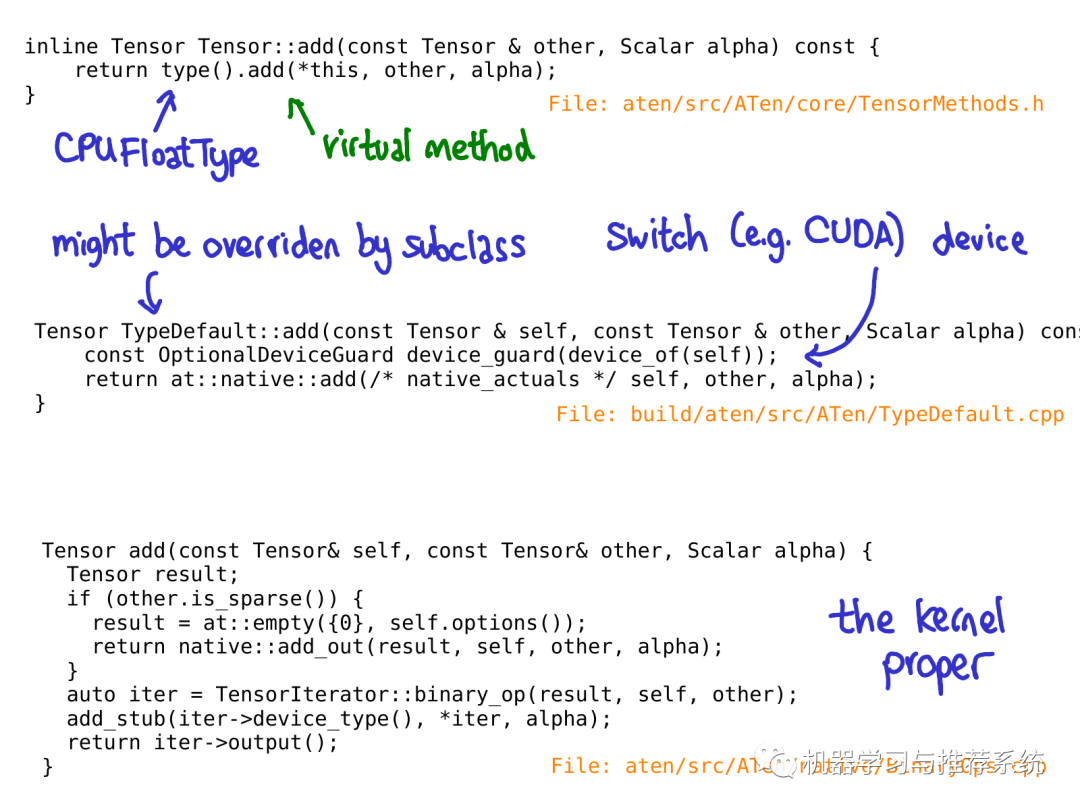
當(dāng)我們調(diào)用C++ Tensor類的add方法時候,虛分派還未發(fā)生。然而,一個內(nèi)聯(lián)(inline)函數(shù)會在"Type"對象上調(diào)用一個虛函數(shù)(譯注:Type對象指代碼中的type()返回的對象,虛函數(shù)指add方法)。這個方法才是真正的虛函數(shù)(這就是為什么我之前說Type是一個媒介,作用是引出虛調(diào)用)。在這個例子里,這個虛函數(shù)調(diào)用被分派到TypeDefault的類的add實(shí)現(xiàn)上,原因是我們提供了一個add的實(shí)現(xiàn),這種實(shí)現(xiàn)在任何一種設(shè)備類型上(包括CPU和CUDA)都一致(譯注:所以叫TypeDefault);假如我們對不同的設(shè)備有具體的實(shí)現(xiàn),可能會調(diào)用類似于CPUFloatType::add這樣的函數(shù),意味著虛函數(shù)add最后將實(shí)際的add操作分派到的CPU上浮點(diǎn)數(shù)相加的具體kernel代碼上。
根據(jù)預(yù)期,這個PPT很快將會過時了,Roy Li正在做一些替代Type分派的工作,這些工作將會使PyTorch對于移動設(shè)備支持的更好。
值得一提的是,所有的代碼,直到對于具體kernel的調(diào)用,都是自動生成的。
這里有點(diǎn)繞,所以一旦你對執(zhí)行流程的大方向有一定的了解,我建議你直接跳到kernels的部分。
Tools for writing kernels
PyTorch為kernels編寫者提供了許多實(shí)用的工具。在這一節(jié)里,我們將會簡要了解他們之中的一部分。但是首先,一個kernel包含哪些東西?
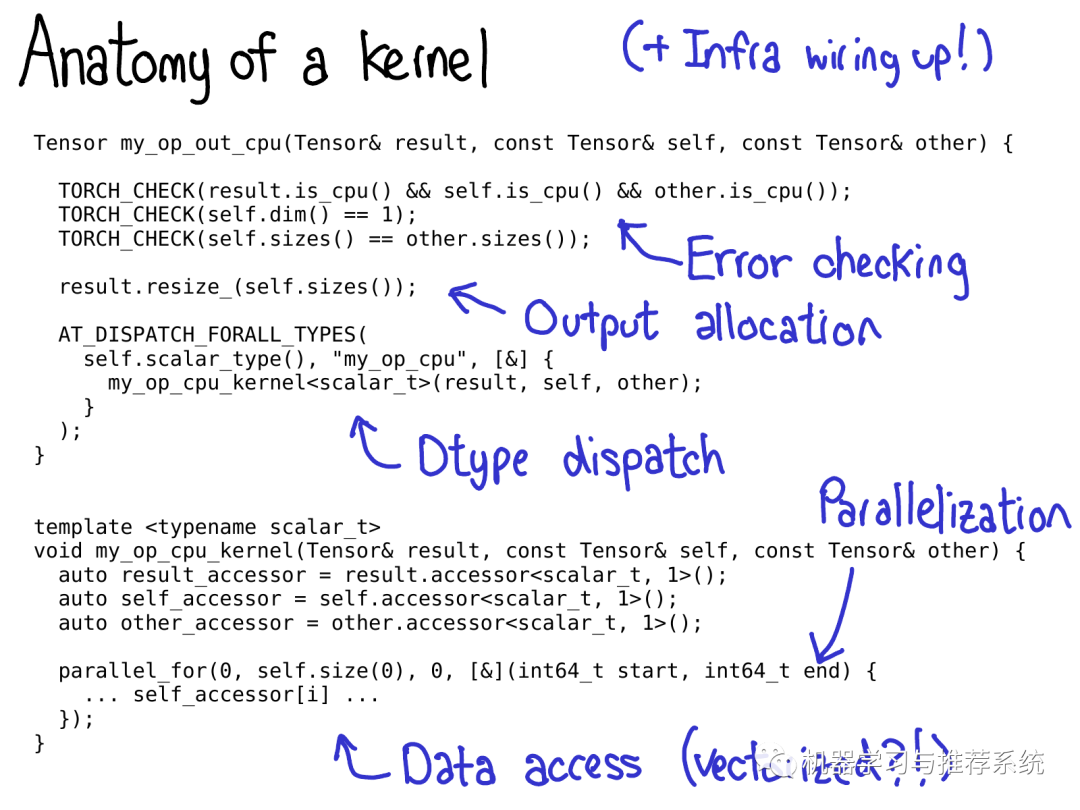
我們通常上認(rèn)為一個kernel包含如下部分:
首先,我們?yōu)閗ernel寫了一些元數(shù)據(jù)(metadata),這些元數(shù)據(jù)驅(qū)動了代碼生成,讓你不用寫一行代碼就可以在Python中調(diào)用kernel。
一旦你訪問了kernel,意味著你經(jīng)過了設(shè)備類型/布局類型的虛函數(shù)分派流程。首先你要寫的一點(diǎn)是錯誤檢測(error checking),以保證輸入tensors有正確的維度。(錯誤檢測非常重要!千萬別跳過它們!)
然后,一般我們會給輸出tensor分配空間,以將結(jié)果寫入進(jìn)去
接下來是編寫合適的kernel。到這里,你應(yīng)該做數(shù)據(jù)類型分派(第二種分派類型dtype),以跳轉(zhuǎn)到一個為特定數(shù)據(jù)類型編寫的kernel上。(通常你不用太早做這個,因?yàn)榭赡軙a(chǎn)生一些重復(fù)的代碼,比如說一些邏輯在任何case上都適用)
許多高效的kernel需要一定程度上的并行,因此你需要利用多核(multi-CPU)系統(tǒng)。(CUDA kernels 暗含著并行的邏輯,因?yàn)樗?a target="_blank">編程模型是建立在大量的并行體系上的)
最后,你需要訪問數(shù)據(jù)并做希望做的計算!
在接下來的PPT里,我會帶你了解PyTorch提供的一些工具幫助你實(shí)現(xiàn)上述步驟。
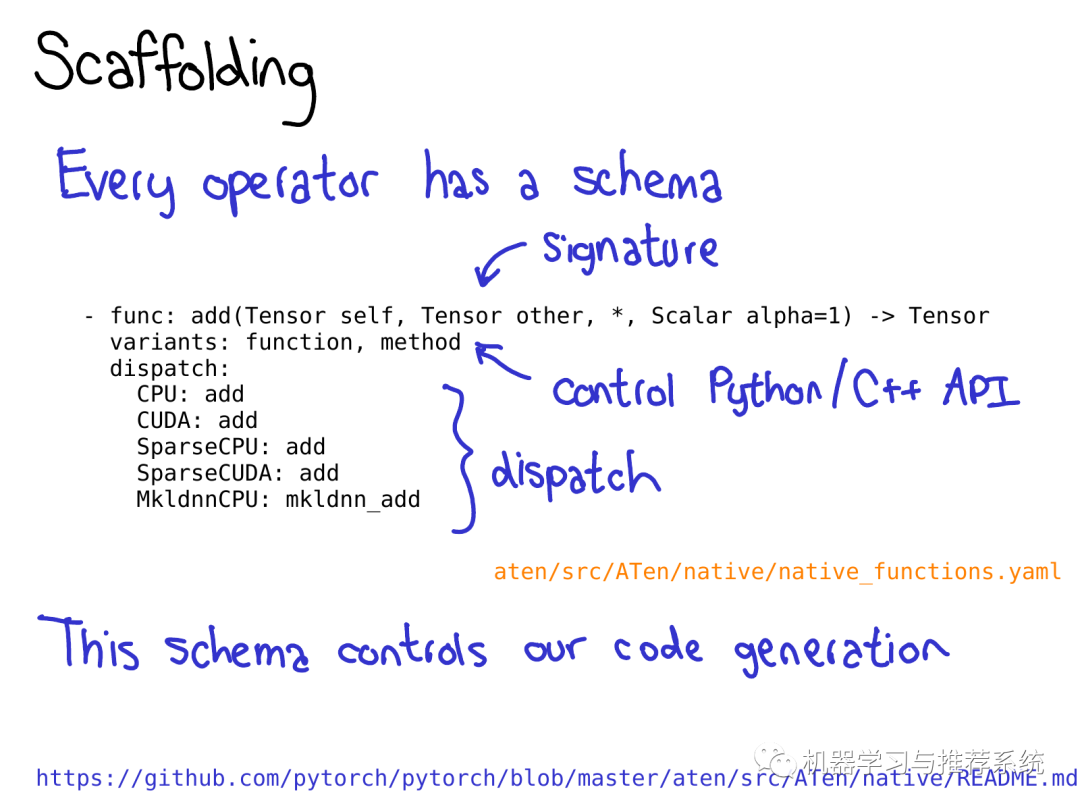
為了充分利用PyTorch帶來的代碼生成機(jī)制,你需要為operator寫一個schema。這個schema需要給定你定義函數(shù)的簽名(signature),并且控制是否我們生成Tensor方法(比如 t.add())以及命名空間函數(shù)(比如at::add())。你也需要在schema中指明當(dāng)一個設(shè)備/布局的組合給定的時候,operator的哪一種實(shí)現(xiàn)需要被調(diào)用。具體格式細(xì)節(jié)查看README in native
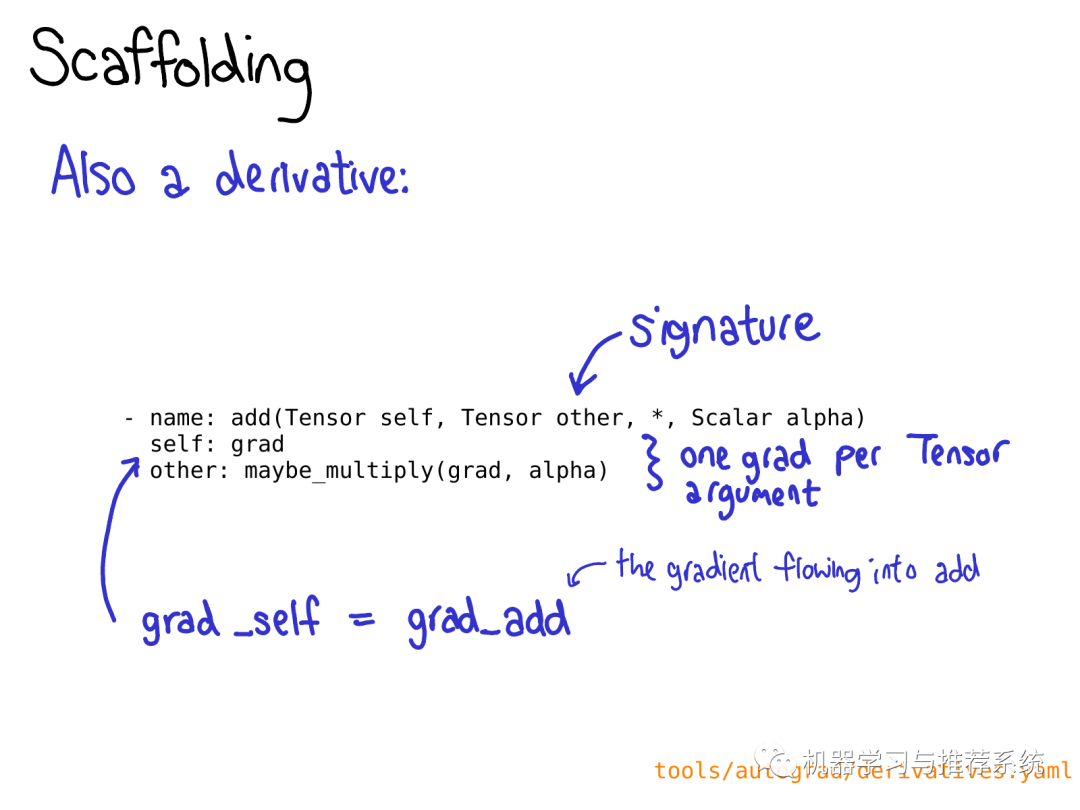
你也可能要在 derivatives.yaml 定義operation的求導(dǎo)操作。
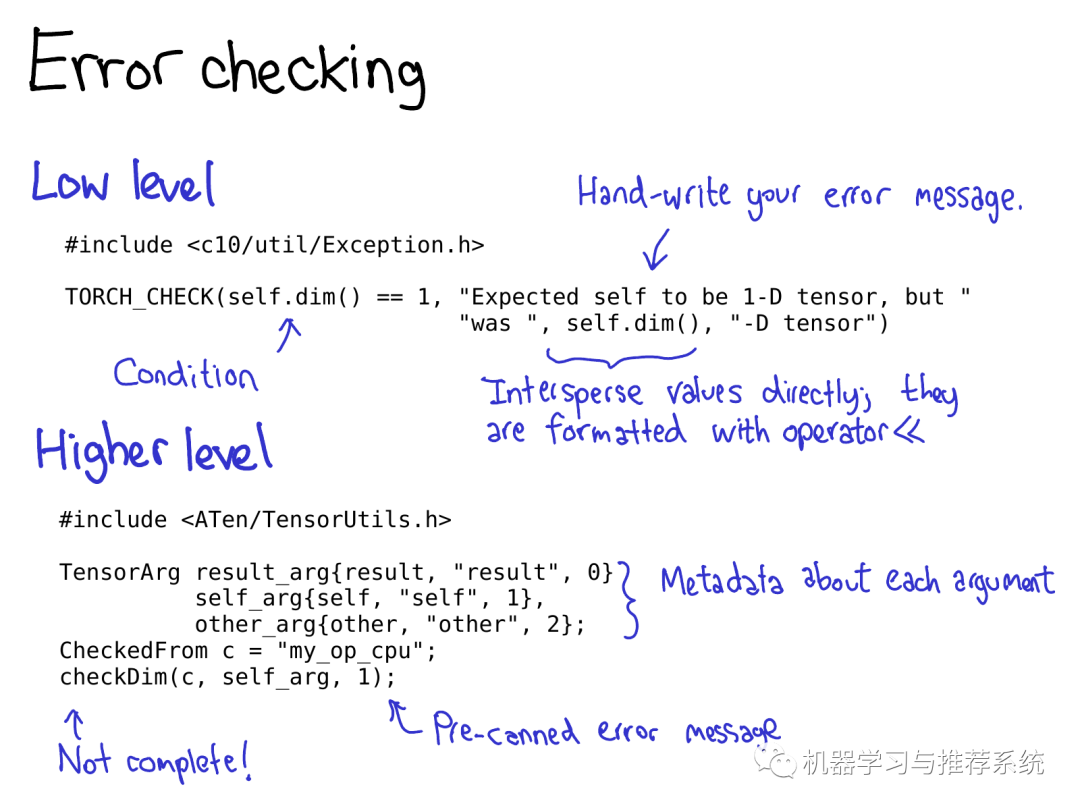
錯誤檢測既能通過底層API也能通過高層API來實(shí)現(xiàn)。底層API如宏(macro):TORCH_CHECK,輸入一個boolean表達(dá)式,跟著一個字符串,如果根據(jù)Boolean表達(dá)式判斷結(jié)果為false,這個宏就會輸出字符串。這個宏比較好的地方是你能將字符串和非字符串?dāng)?shù)據(jù)混合起來輸出,所有的變量都通過他們實(shí)現(xiàn)的<<操作符格式化,PyTorch中大多數(shù)重要的數(shù)據(jù)類型都預(yù)定義了<<操作符。
(譯注:這是C++中字符格式輸出的方式,即通過重載<<操作符) 高層API能夠幫你避免寫重復(fù)的錯誤提示。它的工作方式是首先你將每個Tensor封裝進(jìn)TensorArg中,TensorArg包含這個Tensor的來源信息(比如,通過它的參數(shù)名)。然后它提供了一系列封裝好的函數(shù)來做各種屬性的檢測;比如,checkDim()用來檢測是否tensor的維度是一個固定的數(shù)。如果它不是,這個函數(shù)會基于TensorArg中的元數(shù)據(jù)提供一個可讀性好的錯誤提示。
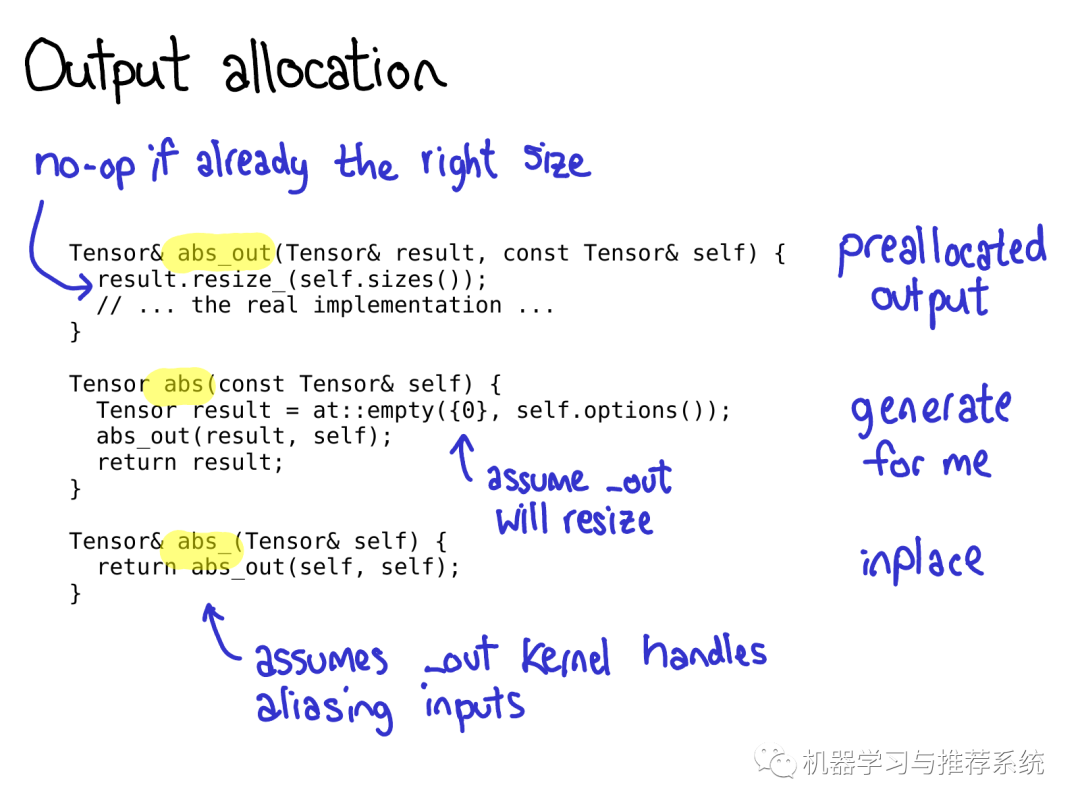
Pytorch中編寫operator的另一件值得注意的事情是,通常對一個operator,你需要編寫三種版本:abs_out這個版本把輸出存儲在(out= 這個關(guān)鍵字參數(shù)中),abs_這個版本會就地修改輸入,abs這個是常規(guī)版本(返回輸出,輸入不變)。 在大多數(shù)情況下,我們實(shí)現(xiàn)的是abs_out版本,然后通過封裝的方式實(shí)現(xiàn)abs和abs_,但是也有給每個函數(shù)實(shí)現(xiàn)一個單獨(dú)版本的時候。
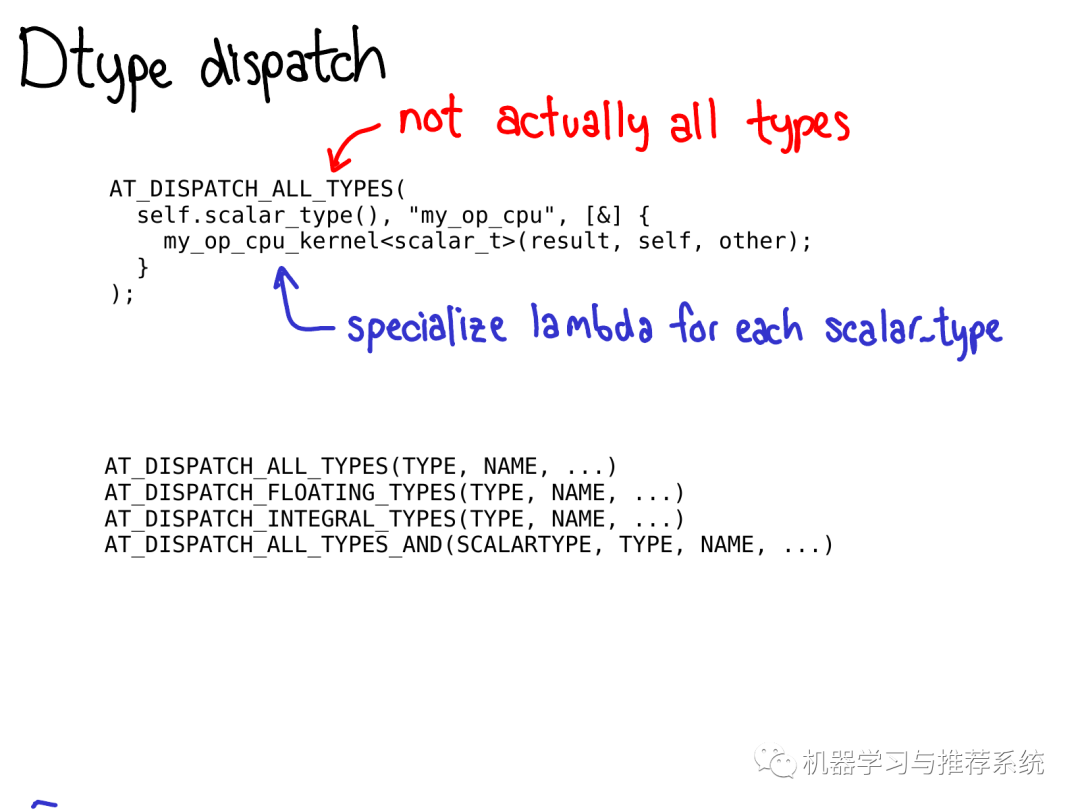
為了做數(shù)據(jù)類型分派(dtype dispatch),你應(yīng)當(dāng)使用AT_DISPATCH_ALL_TYPES宏。這個宏的輸入?yún)?shù)是Tensor的type,和一個可以分派各種的type類型的lambda表達(dá)式,通常情況下,這個lambda表達(dá)式會調(diào)用一個模板幫助函數(shù)(templated helper function,譯注:也是C++中的概念,C++泛型會討論到模板函數(shù))。 這個宏不僅"做分派工作",它也決定了你的kernel將會支持哪些數(shù)據(jù)類型。嚴(yán)格來說,這個宏有幾個不同的版本,這些版本可以讓你選擇處理哪些特定的dtype子集。大多數(shù)情況下,你會使用AT_DISPATCH_ALL_TYPES,但是一定要留心當(dāng)你只想要分派到特定類型的場景。關(guān)于在特定場景如何選擇宏詳見Dispatch.h
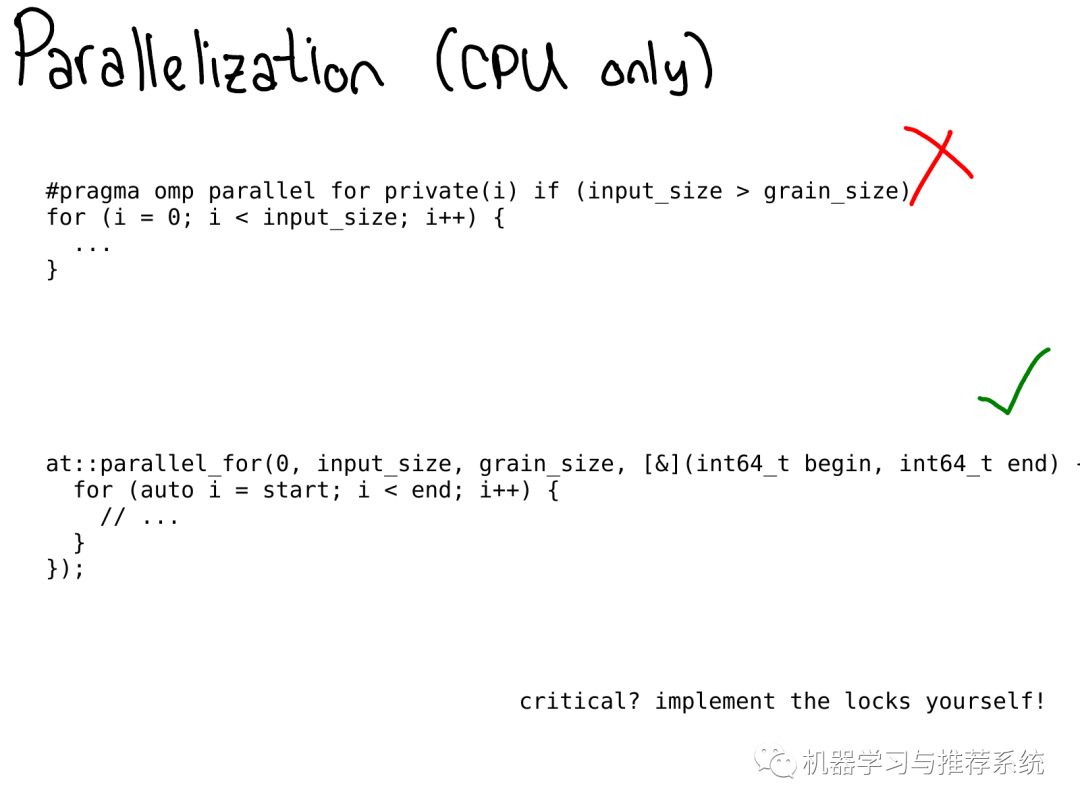
在CPU上, 你經(jīng)常想要并行化你的代碼。在之前,OpenMP 原語(pragmas) 經(jīng)常被用來做并行化的工作。
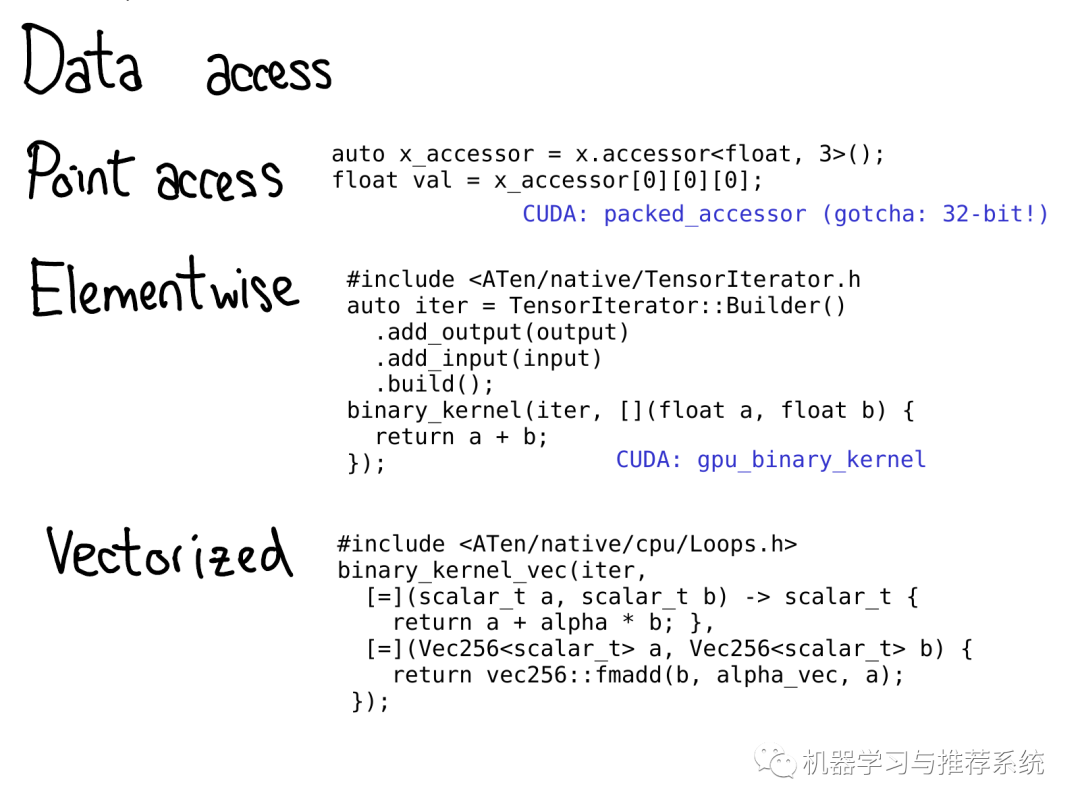
在我們需要訪問數(shù)據(jù)的時候,PyTorch提供了不少選擇。
如果你僅僅想拿到存儲在特定位置的數(shù)值,你應(yīng)該使用TensorAccessor。tensor accessor類似于tensor,但是它將維度(dimensionality)和數(shù)據(jù)類型(dtype)硬編碼(hard codes)成了模板參數(shù)(template parameters 譯注:代碼里的x.accessor
Tensor accessors能夠正確的處理步長(stride),因此當(dāng)你做些原始指針(raw pointer)訪問的時候你應(yīng)當(dāng)盡量用它們 (不幸的是,一些老舊的代碼并沒有這樣)。PyTorch里還有一個PackedTensorAccessor類,被用來在CUDA加載過程中傳輸accessor,因此你能夠在CUDA kernel 內(nèi)訪問accessors。(小提示:TensorAccessor默認(rèn)是64-bit索引的,在CUDA中要比32-bit索引要慢很多)
如果你編寫的operator需要做一些規(guī)律性的數(shù)據(jù)訪問,比如,點(diǎn)乘操作,強(qiáng)烈建議你用高層API比如TensorIterator。這個幫助類自動幫你處理了廣播(broadcasting)和類型提升(type promotion),非常方便。(譯注:廣播和類型提升可以參考numpy相關(guān)的描述)
為了在CPU上執(zhí)行得盡量快,也許你需要使用向量化的CPU指令(vectorized CPU instructions)來編寫kernel。我們也提供了工具!Vec256 類表示一個向量,并提供了一系列的方法以對其向量化的操作(vectorized operations)。幫助函數(shù)比如binary_kernel_vec 讓你更加容易得運(yùn)行向量化的操作,以處理原始的CPU指令不容易處理的向量化的場景。同時,這個類還負(fù)責(zé)針對不同的指令集編譯不同的kernel,然后在運(yùn)行時對你CPU所支持的指令集做測試,以使用最合適的kernel。
Legacy code
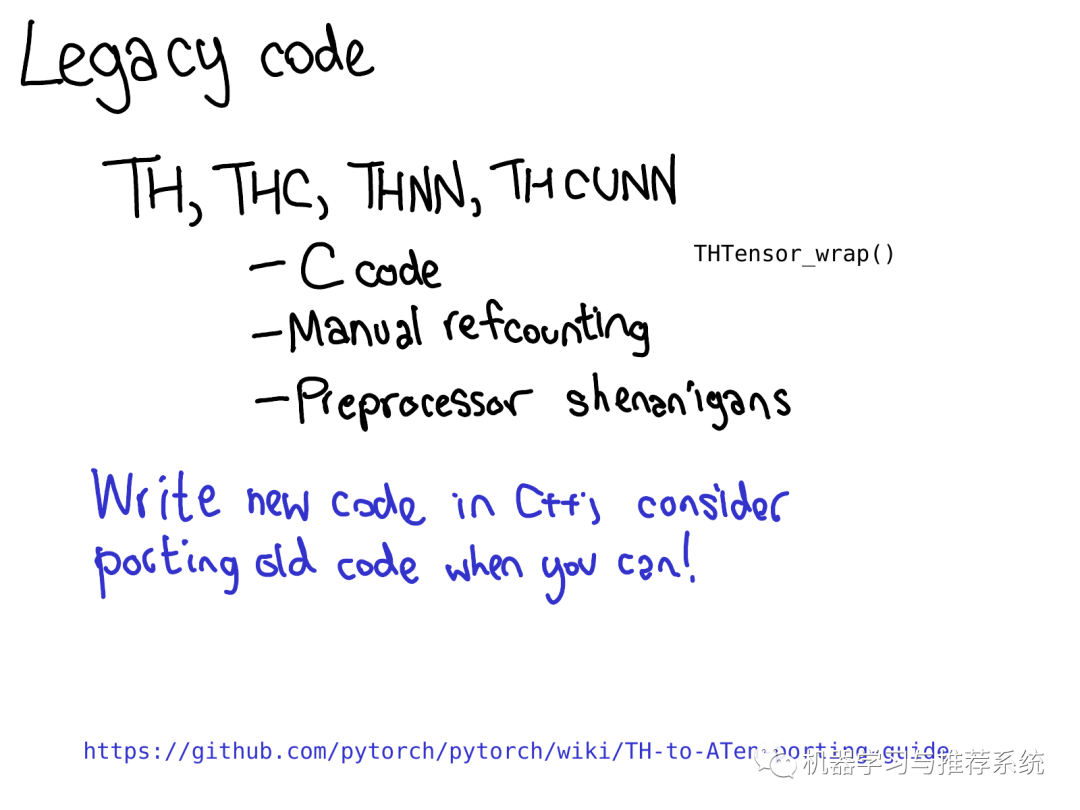
PyTorch 中的許多kernel仍然由古老的TH類型的代碼實(shí)現(xiàn)(順便說一下,TH代表TorcH。縮寫固然很好,但是太常見了,如果你看到了TH,就把它當(dāng)做老舊的就好了)。下面詳細(xì)解釋下什么是老舊的TH類型:
它由C代碼編寫,沒有(或者極少)用到C++
它是由手動引用計數(shù)的(當(dāng)不再使用某個tensor的時候,通過手工調(diào)用THTensor_free方法來減少引用計數(shù))
它存在于 generic/文件夾中,意味著我們需要通過定義不同的#define scalar_t來多次編譯。
這些代碼是很"瘋狂"的,我們也不愿意維護(hù)它們,所以請不要再向里面添加?xùn)|西了。你可以做的更有意義的事情是,如果你喜歡編程但是不熟悉關(guān)于kernel的編寫,你可以嘗試著移植這些TH函數(shù)到ATen里面去。
Workflow efficiency
作為總結(jié),我想要討論一些關(guān)于高效擴(kuò)展PyTorch的技巧。如果說龐大的PyTorch C++代碼庫是第一道阻止很多人貢獻(xiàn)代碼到PyTorch的門檻,那么工作效率就是第二道門檻。如果你試著用寫Python的習(xí)慣編寫C++代碼,你將會花費(fèi)大量的時間,因?yàn)橹匦戮幾gPyTorch太耗時了,你需要無盡的時間來驗(yàn)證你的改動是否奏效。 如何高效的改動PyTorch可能需要另一場專門的talk,但是這個PPT總結(jié)了一些常見的"誤區(qū)":
如果你編輯了一個頭文件,尤其是那種包含許多源文件(尤其是包含了CUDA文件),那么你可能會需要一個非常長時間的重新編譯。為了避免這個,盡量保持只修改cpp文件,盡量少修改頭文件!
我們的CI(譯注:應(yīng)該指一個云端的已配置好的環(huán)境,見鏈接)是一個非常好的,不需要任何配置的環(huán)境來測試你的修改是否會奏效。但是在你得到結(jié)果之前估計需要1到2小時。如果你的修改需要大量的實(shí)驗(yàn)驗(yàn)證,把時間花在設(shè)置一個本地開發(fā)環(huán)境上吧。同樣,如果你遇到了一個特別難以debug的問題,在本地環(huán)境中測試它。你可以下載并且使用我們的Docker鏡像 download and run the Docker images locally
如何貢獻(xiàn)的文檔詳述了如何設(shè)置ccache,我們強(qiáng)烈推薦這個,因?yàn)楹芏嗲闆r下它會在你修改頭文件時幫助你節(jié)省重新編譯的時間。它也能幫助你避免一些我們編譯系統(tǒng)的bugs,比如重新編譯了一些不該重新編譯的文件。
我們有大量的C++代碼,推薦你在一個有著充足CPU和RAM資源的服務(wù)器上編譯。強(qiáng)烈不建議你用自己的筆記本編譯CUDA,編譯CUDA是特特特特別慢的,筆記本不具備快速編譯的能力。
Conclusions
總之這份教程帶你快速掃過PyTorch內(nèi)部機(jī)制!許多東西沒有被討論到,但是希望以上的描述和解釋能夠幫助你對代碼的大體結(jié)構(gòu)有個初步的了解。 看完這份教程后你需要去哪里獲得更詳細(xì)的資源?你能夠做哪種類型的貢獻(xiàn)?一個比較好的起點(diǎn)是我們的問題追蹤器(issue tracker)。在今年早些時候,我們開始對問題進(jìn)行標(biāo)注,一個標(biāo)注過的問題意味著至少有一個PyTorch開發(fā)者注意到了它并且做了初始的任務(wù)評估。
通過這些標(biāo)注你能夠知道我們認(rèn)為哪些問題是high priority的,或者你可以查詢屬于特定模塊的問題,例如 autograd ,或者你可以查詢一些我們認(rèn)為不是那么重要的小問題(警告:我們有時也會判斷失誤) 即使你不想立刻開始編程,也有很多有意義的工作比如改善文檔(我喜歡合并文檔的pull請求,它們實(shí)在是太好了),幫助我們復(fù)現(xiàn)其他用戶報告的bug,幫助我們討論問題追蹤中的RFCs(request for comment,請求給出詳細(xì)注釋)。
責(zé)任編輯:xj
原文標(biāo)題:一文搞懂 PyTorch 內(nèi)部機(jī)制
文章出處:【微信公眾號:深度學(xué)習(xí)自然語言處理】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
源碼
+關(guān)注
關(guān)注
8文章
668瀏覽量
30172 -
pytorch
+關(guān)注
關(guān)注
2文章
809瀏覽量
13784
原文標(biāo)題:一文搞懂 PyTorch 內(nèi)部機(jī)制
文章出處:【微信號:zenRRan,微信公眾號:深度學(xué)習(xí)自然語言處理】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
利用Arm Kleidi技術(shù)實(shí)現(xiàn)PyTorch優(yōu)化
PyTorch 2.5.1: Bugs修復(fù)版發(fā)布






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論