 嵌入式案例 用RT-Thread和STM32實現機器人驅動控制模型算法
嵌入式案例 用RT-Thread和STM32實現機器人驅動控制模型算法
概述
機器人運動系統式一套高復雜性、高耦合性、驅動力小于機體物理自由度的非線性系統,為了實現機器人在空間中穩定的運動姿態控制,本設計把機器人運動系統在空間中的運動形式等效成了旋轉倒立擺模型,基于該模型的運動特點,分別設計了速度閉環控制算法和角度閉環控制算法,通過雙閉環控制算法來實現對空間中旋轉倒立擺的穩定控制。
開發環境
硬件:該設計硬件依托于ART-PI開發平臺,主控芯片采用STM32H750高性能單片機,同時采用TB6612芯片作為旋轉倒立擺的核心動力驅動,采用霍爾傳感器作為速度采集,采用高精度電位器作為擺臂角度采集傳感器,采用OLED屏幕來進行參數的顯示,與實時調整。
RT-Thread版本:RT-Thread版本采用4.0.2
開發工具及版本:mdk5.32版本
RT-Thread使用情況概述
本設計采用rt-thread 4.0.2 master版本,用到了該操作系統的全內核、FinSH控制臺交互,SPI驅動、ADC驅動、編碼器驅動、PWM驅動等相關系統驅動,并且編寫了雙閉環PID控制算法。
軟件框架說明
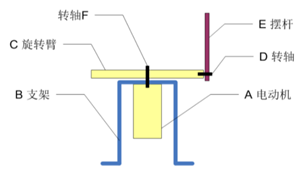
本設計硬件平臺基于ART-PI,核心部分已經固定,針對旋轉倒立擺機械部分,其結構如下圖所示:
軟件模塊說明
本設計最關鍵的部分是PID算法的實現,針對倒立擺的運動特點,進行了優化與調整,PID算法的實現基于經典控制理論中線性控制的理論基礎:
在工程實際中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節[6]。PID控制器問世至今已有近70年歷史,它以其結構簡單、穩定性好、工作可靠、調整方便而成為工業控制的主要技術之一。當被控對象的結構和參數不能完全掌握,或得不到精確的數學模型時,控制理論的其它技術難以采用時,系統控制器的結構和參數必須依靠經驗和現場調試來確定,
在積分控制中,控制器的輸出與輸入誤差信號的積分成正比關系。對一個自動控制系統,如果在進入穩態后存在穩態誤差,則稱這個控制系統是有穩態誤差的或簡稱有差系統。為了消除穩態誤差,在控制器中必須引入“積分項”。積分項對誤差取決于時間的積分,隨著時間的增加,積分項會增大。這樣即便誤差很小,積分項也會隨著時間的增加而加大,它推動控制器的輸出增大使穩態誤差進一步減小,直到等于零。因此,比例加積分(PI)控制器,可以使系統在進入穩態后無穩態誤差。
微分(D)控制
在微分控制中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關系。自動控制系統在克服誤差的調節過程中可能會出現振蕩甚至失穩。其原因是由于存在有較大慣性組件(環節)或有滯后組件,具有抑制誤差的作用,其變化總是落后于誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時,抑制誤差的作用就應該是零。
這就是說,在控制器中僅引入“比例”項往往是不夠的,比例項的作用僅是放大誤差的幅值,而目前需要增加的是“微分項”,它能預測誤差變化的趨勢,這樣,具有比例微分的控制器,就能夠提前使抑制誤差的控制作用等于零,甚至為負值,從而避免了被控量的嚴重超調。所以對有較大慣性或滯后的被控對象,比例微分(PD)控制器能改善系統在調節過程中的動態特性。
演示效果
比賽感悟
本次比賽基本是利用業余時間一點一點完成,中間遇到了一些困難,主要問題出現在對芯片的底層配置上,不過通過對比手冊介紹與仿真,都能初步解決。得益于RT-Thread操作系統完善的內核管理,調試交互,驅動設計、使得在設計中少走了很多彎路,加快了開發速度,推薦大家都來嘗試使用該系統,真的很好。
原文標題:【RT-Thread作品秀】基于嵌入式操作系統的機器人驅動控制模型算法設計與實現
文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
-
嵌入式
+關注
關注
5094文章
19183瀏覽量
307798 -
機器人
+關注
關注
211文章
28658瀏覽量
208495 -
算法
+關注
關注
23文章
4630瀏覽量
93376 -
STM32
+關注
關注
2272文章
10925瀏覽量
357654 -
RT-Thread
+關注
關注
31文章
1305瀏覽量
40402
原文標題:【RT-Thread作品秀】基于嵌入式操作系統的機器人驅動控制模型算法設計與實現
文章出處:【微信號:cirmall,微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于RT-Thread和STM32的數碼相框設計方案

RT-Thread全球嵌入式電子設計大賽

基于rt-thread嵌入式操作系統的小Demo制作過程記錄
【原創精選】RT-Thread征文精選技術文章合集
嵌入式實時操作系統RT-Thread的特點與體系結構及移植方法詳細說明
RT-Thread Studio驅動SD卡

【嵌入式AI入門日記】將 AI 模型移植到 RT-Thread 上(1)
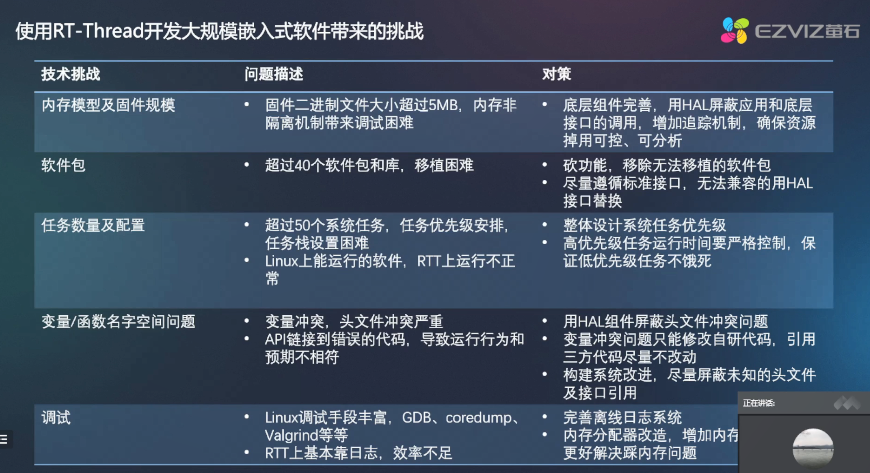
RT-Thread全球技術大會:使用RT-Thread開發大規模嵌入式軟件帶來的挑戰與好處
RT-Thread學習筆記 RT-Thread的架構概述

RT-Thread文檔_RT-Thread 潘多拉 STM32L475 上手指南
新書上架|嵌入式系統原理及應用——基于STM32和RT-Thread
【好書推薦】RT-Thread設備驅動開發指南
新書發布——《RT-Thread嵌入式實時操作系統內核、驅動和應用開發技術》





 工商網監
工商網監
評論