") 簡(jiǎn)析如何獲取單片機(jī)代碼運(yùn)行時(shí)間的方法
簡(jiǎn)析如何獲取單片機(jī)代碼運(yùn)行時(shí)間的方法
前言
單片機(jī)編程者需要知道自己的程序需要花費(fèi)多長(zhǎng)時(shí)間、while周期是多少、delay延時(shí)是否真如函數(shù)功能描述那樣精確延時(shí)。
很多時(shí)候,我們想知道這些參數(shù),但是由于懶惰或者沒有簡(jiǎn)單的辦法,將這件事推到“明天”。筆者提出了一種簡(jiǎn)便的測(cè)試方法,可以解決這些問題。
測(cè)試代碼的運(yùn)行時(shí)間的兩種方法:
使用單片機(jī)內(nèi)部定時(shí)器,在待測(cè)程序段的開始啟動(dòng)定時(shí)器,在待測(cè)程序段的結(jié)尾關(guān)閉定時(shí)器。為了測(cè)量的準(zhǔn)確性,要進(jìn)行多次測(cè)量,并進(jìn)行平均取值。
借助示波器的方法是:在待測(cè)程序段的開始階段使單片機(jī)的一個(gè)GPIO輸出高電平,在待測(cè)程序段的結(jié)尾階段再令這個(gè)GPIO輸出低電平。用示波器通過檢查高電平的時(shí)間長(zhǎng)度,就知道了這段代碼的運(yùn)行時(shí)間。顯然,借助于示波器的方法更為簡(jiǎn)便。
以下內(nèi)容為這兩種方案的實(shí)例,以STM32為測(cè)試平臺(tái)。如果讀者是在另外的硬件平臺(tái)上測(cè)試,實(shí)際也不難,思路都是一樣的,自己可以編寫對(duì)應(yīng)的測(cè)試代碼。
借助示波器方法的實(shí)例
Delay_us函數(shù)使用STM32系統(tǒng)滴答定時(shí)器實(shí)現(xiàn):
#include “systick.h”
/* SystemFrequency / 1000 1ms中斷一次
* SystemFrequency / 100000 10us中斷一次
* SystemFrequency / 1000000 1us中斷一次
*/
#define SYSTICKPERIOD 0.000001
#define SYSTICKFREQUENCY (1/SYSTICKPERIOD)
/**
* @brief 讀取SysTick的狀態(tài)位COUNTFLAG
* @param 無
* @retval The new state of USART_FLAG (SET or RESET)。
*/
static FlagStatus SysTick_GetFlagStatus(void)
{
if(SysTick-》CTRL&SysTick_CTRL_COUNTFLAG_Msk)
{
return SET;
}
else
{
return RESET;
}
}
/**
* @brief 配置系統(tǒng)滴答定時(shí)器 SysTick
* @param 無
* @retval 1 = failed, 0 = successful
*/
uint32_t SysTick_Init(void)
{
/* 設(shè)置定時(shí)周期為1us */
if (SysTick_Config(SystemCoreClock / SYSTICKFREQUENCY))
{
/* Capture error */
return (1);
}
/* 關(guān)閉滴答定時(shí)器且禁止中斷 */
SysTick-》CTRL &= ~ (SysTick_CTRL_ENABLE_Msk | SysTick_CTRL_TICKINT_Msk);
return (0);
}
/**
* @brief us延時(shí)程序,10us為一個(gè)單位
* @param
* @arg nTime: Delay_us( 10 ) 則實(shí)現(xiàn)的延時(shí)為 10 * 1us = 10us
* @retval 無
*/
void Delay_us(__IO uint32_t nTime)
{
/* 清零計(jì)數(shù)器并使能滴答定時(shí)器 */
SysTick-》VAL = 0;
SysTick-》CTRL |= SysTick_CTRL_ENABLE_Msk;
for( ; nTime 》 0 ; nTime--)
{
/* 等待一個(gè)延時(shí)單位的結(jié)束 */
while(SysTick_GetFlagStatus() != SET);
}
/* 關(guān)閉滴答定時(shí)器 */
SysTick-》CTRL &= ~ SysTick_CTRL_ENABLE_Msk;
}
檢驗(yàn)Delay_us執(zhí)行時(shí)間中用到的GPIO(gpio.h、gpio.c)的配置:
#ifndef __GPIO_H
#define __GPIO_H
#include “stm32f10x.h”
#define LOW 0
#define HIGH 1
/* 帶參宏,可以像內(nèi)聯(lián)函數(shù)一樣使用 */
#define TX(a) if (a)
GPIO_SetBits(GPIOB,GPIO_Pin_0);
else
GPIO_ResetBits(GPIOB,GPIO_Pin_0)
void GPIO_Config(void);
#endif
#include “gpio.h”
/**
* @brief 初始化GPIO
* @param 無
* @retval 無
*/
void GPIO_Config(void)
{
/*定義一個(gè)GPIO_InitTypeDef類型的結(jié)構(gòu)體*/
GPIO_InitTypeDef GPIO_InitStructure;
/*開啟LED的外設(shè)時(shí)鐘*/
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
在main函數(shù)中檢驗(yàn)Delay_us的執(zhí)行時(shí)間:
#include “systick.h”
#include “gpio.h”
/**
* @brief 主函數(shù)
* @param 無
* @retval 無
*/
int main(void)
{
GPIO_Config();
/* 配置SysTick定時(shí)周期為1us */
SysTick_Init();
for(;;)
{
TX(HIGH);
Delay_us(1);
TX(LOW);
Delay_us(100);
}
}
示波器的觀察結(jié)果:
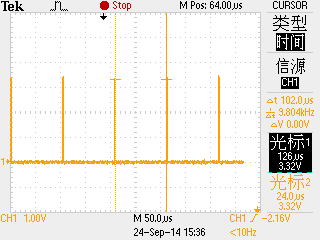
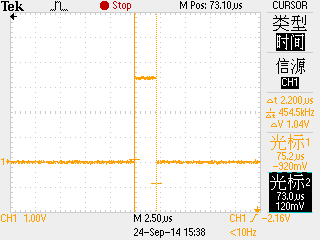
可見Delay_us(100),執(zhí)行了大概102us,而Delay_us(1)執(zhí)行了2.2us。
更改一下main函數(shù)的延時(shí)參數(shù):
int main(void)
{
/* LED 端口初始化 */
GPIO_Config();
/* 配置SysTick定時(shí)周期為1us */
SysTick_Init();
for(;;)
{
TX(HIGH);
Delay_us(10);
TX(LOW);
Delay_us(100);
}
}
示波器的觀察結(jié)果:
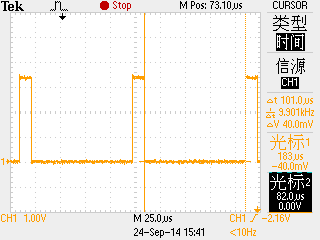
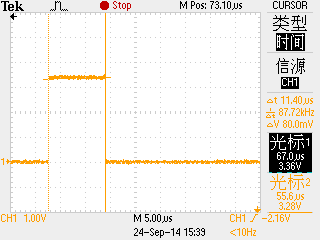
可見Delay_us(100),執(zhí)行了大概101us,而Delay_us(10)執(zhí)行了11.4us。
結(jié)論:此延時(shí)函數(shù)基本上還是可靠的。
使用定時(shí)器方法的實(shí)例
至于使用定時(shí)器方法,軟件檢測(cè)程序段的執(zhí)行時(shí)間,程序?qū)崿F(xiàn)思路見STM32之系統(tǒng)滴答定時(shí)器:
http://www.cnblogs.com/amanlikethis/p/3730205.html
筆者已經(jīng)將檢查軟件的使用封裝成庫(kù),使用方法在鏈接文章中也有介紹。我們這里只做一下簡(jiǎn)要的實(shí)踐活動(dòng)。
Delay_us函數(shù)使用STM32定時(shí)器2實(shí)現(xiàn):
#include “timer.h”
/* SystemFrequency / 1000 1ms中斷一次
* SystemFrequency / 100000 10us中斷一次
* SystemFrequency / 1000000 1us中斷一次
*/
#define SYSTICKPERIOD 0.000001
#define SYSTICKFREQUENCY (1/SYSTICKPERIOD)
/**
* @brief 定時(shí)器2的初始化,,定時(shí)周期1uS
* @param 無
* @retval 無
*/
void TIM2_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
/*AHB = 72MHz,RCC_CFGR的PPRE1 = 2,所以APB1 = 36MHz,TIM2CLK = APB1*2 = 72MHz */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = SystemCoreClock/SYSTICKFREQUENCY -1;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ARRPreloadConfig(TIM2, ENABLE);
/* 設(shè)置更新請(qǐng)求源只在計(jì)數(shù)器上溢或下溢時(shí)產(chǎn)生中斷 */
TIM_UpdateRequestConfig(TIM2,TIM_UpdateSource_Global);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
}
/**
* @brief us延時(shí)程序,10us為一個(gè)單位
* @param
* @arg nTime: Delay_us( 10 ) 則實(shí)現(xiàn)的延時(shí)為 10 * 1us = 10us
* @retval 無
*/
void Delay_us(__IO uint32_t nTime)
{
/* 清零計(jì)數(shù)器并使能滴答定時(shí)器 */
TIM2-》CNT = 0;
TIM_Cmd(TIM2, ENABLE);
for( ; nTime 》 0 ; nTime--)
{
/* 等待一個(gè)延時(shí)單位的結(jié)束 */
while(TIM_GetFlagStatus(TIM2, TIM_FLAG_Update) != SET);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);
}
TIM_Cmd(TIM2, DISABLE);
}
在main函數(shù)中檢驗(yàn)Delay_us的執(zhí)行時(shí)間:
#include “stm32f10x.h”
#include “Timer_Drive.h”
#include “gpio.h”
#include “systick.h”
TimingVarTypeDef Time;
int main(void)
{
TIM2_Init();
SysTick_Init();
SysTick_Time_Init(&Time);
for(;;)
{
SysTick_Time_Start();
Delay_us(1000);
SysTick_Time_Stop();
}
}
怎么去看檢測(cè)結(jié)果呢?用調(diào)試的辦法,打開調(diào)試界面后,將Time變量添加到Watch一欄中。然后全速運(yùn)行程序,既可以看到Time中保存變量的變化情況,其中TimeWidthAvrage就是最終的結(jié)果。
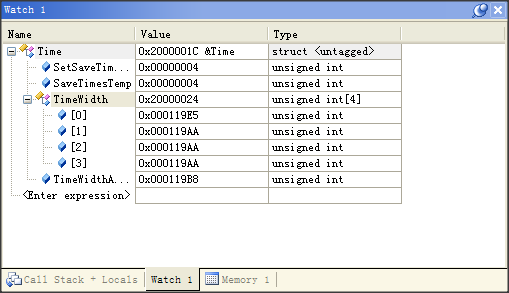
可以看到TimeWidthAvrage的值等于0x119B8,十進(jìn)制數(shù)對(duì)應(yīng)72120,滴答定時(shí)器的一個(gè)滴答為1/72M(s),所以Delay_us(1000)的執(zhí)行時(shí)間就是72120*1/72M (s) = 0.001001s,也就是1ms。驗(yàn)證成功。
備注:定時(shí)器方法輸出檢測(cè)結(jié)果有待改善,你可以把得到的TimeWidthAvrage轉(zhuǎn)換成時(shí)間(以u(píng)s、ms、s)為單位,然后通過串口打印出來,不過這部分工作對(duì)于經(jīng)常使用調(diào)試的人員來說也可有可無。
兩種方法對(duì)比
軟件測(cè)試方法:
操作起來復(fù)雜,由于在原代碼基礎(chǔ)上增加了測(cè)試代碼,可能會(huì)影響到原代碼的工作,測(cè)試可靠性相對(duì)較低。由于使用32位的變量保存systick的計(jì)數(shù)次數(shù),計(jì)時(shí)的最大長(zhǎng)度可以達(dá)到2^32/72M = 59.65 s。
示波器方法
操作簡(jiǎn)單,在原代碼基礎(chǔ)上幾乎沒有增加代碼,測(cè)試可靠性很高。由于示波器的顯示能力有限,超過1s以上的程序段,計(jì)時(shí)效果不是很理想。但是,通常的單片機(jī)程序?qū)崟r(shí)性要求很高,一般不會(huì)出現(xiàn)程序段時(shí)間超過秒級(jí)的情況。
綜合對(duì)比,推薦使用示波器方法。
編輯:jq
-
單片機(jī)
+關(guān)注
關(guān)注
6064文章
44932瀏覽量
647516 -
定時(shí)器
+關(guān)注
關(guān)注
23文章
3289瀏覽量
117342 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4372瀏覽量
64292
原文標(biāo)題:實(shí)用 | 獲取單片機(jī)代碼運(yùn)行時(shí)間的方法
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
基于RK3576的時(shí)間參數(shù)系統(tǒng)操作

獲取具有三個(gè)輸出的自定義模型的輸出張量,運(yùn)行時(shí)錯(cuò)誤是怎么回事?
在Windows上安裝OpenVINO?運(yùn)行時(shí)遇到錯(cuò)誤怎么解決?
運(yùn)行時(shí)OpenVINO?找不到模型優(yōu)化器,為什么?
智能電機(jī)控制裝置如何最大限度地提高恢復(fù)能力和正常運(yùn)行時(shí)間
ups主機(jī)選購(gòu)方法,選擇電池運(yùn)行時(shí)間滿足

如何寫出穩(wěn)定的單片機(jī)代碼
51單片機(jī)的主要邏輯功能部件是什么
影響逆變器電池狀態(tài)的原因,整體運(yùn)行時(shí)間

32位單片機(jī)的電路設(shè)計(jì)技巧分享!
C2000?MCU的運(yùn)行時(shí)堆棧大小監(jiān)測(cè)

單片機(jī)燒錄程序的線比單片機(jī)上的少還能燒錄嗎
單片機(jī)程序燒錄成功為什么不運(yùn)行
直線電機(jī)在運(yùn)行時(shí)噪音大不大





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論