 深度解讀機器人互鎖及工位的釋放信號的編寫
深度解讀機器人互鎖及工位的釋放信號的編寫

所有夾具和機器人的釋放安全信號是A/E80-57,通過PLC順序塊控制機器人工作,如上件,焊接,下件。
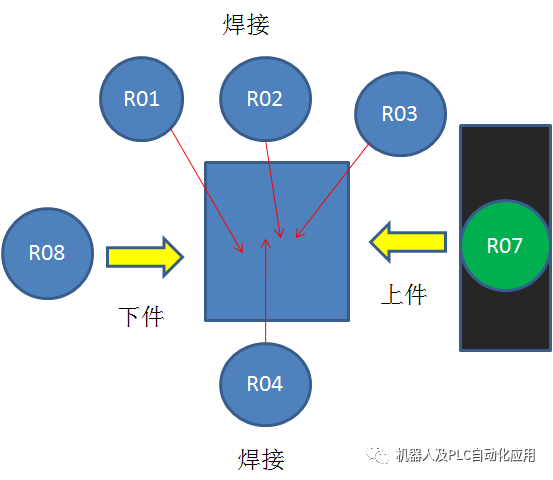
這時我們需要編寫焊接機器人之間的互鎖信號,以及上件機器人與焊接機器人之間的互鎖信號,以及下件機器人與焊接機器人的互鎖
因此一個機器人在進入程序第一步準備工作時會先釋放所有機器人之間的互鎖信號,讓后釋放和工位之間的安全信號,最后等待PLC如許進入工位焊接的釋放信號。
------機器人之間的互鎖信號-------
6: A47 = EIN
7: A48 = EIN
8: A49 = EIN
9: A50 = EIN
10: A51 = EIN
11: A52 = EIN
12: A53 = EIN
13: A54 = EIN
14: A55 = EIN
15: A56 = EIN
------機器人與PLC工位之間的防撞信號
17: A80 = EIN
18: A77 = EIN
19: A74 = EIN
20: A71 = EIN
21: A68 = EIN
等待PLC釋放機器人開始工作
22: WARTE BIS E80 & E77 & E74 & E68
一旦PLC釋放機器人開始工作,機器人會關閉與PLC的安全信號
23: A80 = AUS
24: A77 = AUS
25: A74 = AUS
26: A68 = AUS
機器人不論是否在防撞區都會等待等待防撞信號,這是大眾標準處于安全作出的考慮。
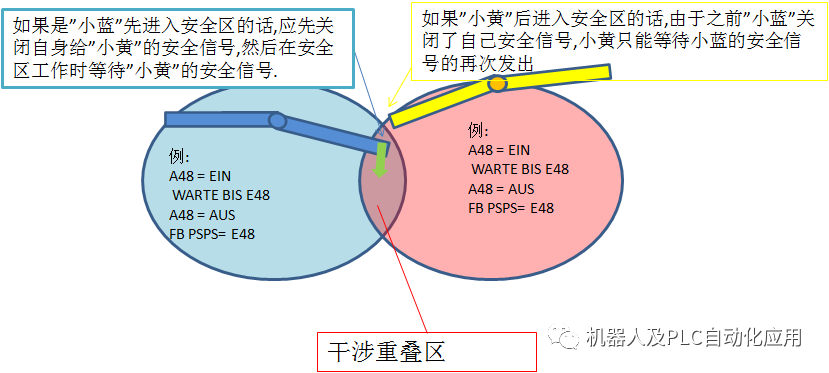
3: -- 在進入兩機器人工作重疊區時需要關閉防撞區,通過PLC程序--
4: A91 = EIN
5: SPSMAKRO20 = EIN
-- 在進入兩機器人工作重疊區時需要關閉防撞區,通過PLC程序–
7: A94 = EIN
8: SPSMAKRO20 = EIN 用來關閉機器人之間的防撞信號使其他機器人不能進入。
這時會增加等待機器人之間的互鎖信號,因為你在進入重疊工作區時,需要相對應機器人釋放出相應的安全信號,否則機器人在重疊區內將等待互鎖信號。
FB PSPS = M30 & M95 & E51 & E52 & E68 & E74 & E77 & E80
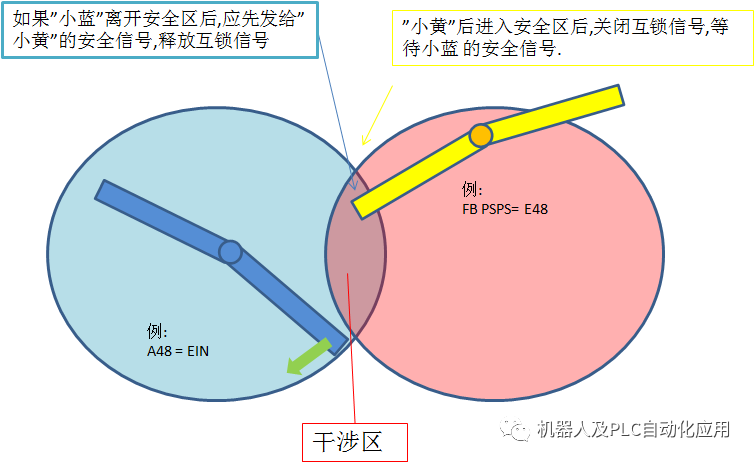
離開重疊干涉區后會發出之前關閉的互鎖信號,潤許相對機器人進入,同時可以不再等待與`對應機器人之間的互鎖信號
5: A50 = EIN 發出釋放信號
不再等待之前的互鎖信號
FB PSPS = M30 & M95 & E51 & E52 & E68& E71 & E74 & E77 & E80
機器人結束工作后會釋放與工位的安全信號,和機器人之間的互鎖信號。
機器人于工位之間的安全信號釋放
4: A80 = EIN
5: A77 = EIN
6: A74 = EIN
7: A68 = EIN
8: -- 機器人之間的互鎖信號釋放--
9: A51 = EIN
10: A52 = EIN
編輯:jq
-
機器人
+關注
關注
213文章
29726瀏覽量
212810 -
plc
+關注
關注
5036文章
13906瀏覽量
474428 -
焊接機器人
+關注
關注
16文章
332瀏覽量
15370
原文標題:機器人互鎖及工位的釋放信號編寫
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
明遠智睿SSD2351開發板:語音機器人領域的變革力量
從機械應答到深度交互,移遠通信如何讓機器人“靈魂覺醒”?

盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
工業機器人工作站的建設意義
工業機器人市場釋放回暖信號
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】+初品的體驗
從市場角度對機器人的基本解讀






 工商網監
工商網監
評論