") OpenHarmony HDF 驅(qū)動框架概述及加載過程分析
OpenHarmony HDF 驅(qū)動框架概述及加載過程分析
OpenHarmony系統(tǒng)
HDF驅(qū)動框架概述
OpenAtom OpenHarmony(以下簡稱“OpenHarmony”)系統(tǒng) HDF 驅(qū)動框架采用 C 語言面向?qū)ο?a target="_blank">編程模型構(gòu)建,通過平臺解耦、內(nèi)核解耦,來達到兼容不同內(nèi)核,統(tǒng)一平臺底座的目的,從而幫助開發(fā)者實現(xiàn)驅(qū)動一次開發(fā),多系統(tǒng)部署的效果。
為了達成這個目標, OpenHarmony 系統(tǒng) HDF 驅(qū)動框架提供了:
操作系統(tǒng)適配層(OSAL,Operating System Abstraction Layer):對內(nèi)核操作相關接口進行統(tǒng)一封裝,屏蔽不同系統(tǒng)操作接口。
平臺驅(qū)動接口:提供 Board 部分驅(qū)動(例如,I2C/SPI/UART 總線等平臺資源)支持,同時對 Board 硬件操作進行統(tǒng)一的適配接口抽象,方便開發(fā)者只需開發(fā)新硬件抽象接口,即可獲得新增 Board 部分驅(qū)動支持。
驅(qū)動模型:面向器件驅(qū)動,提供常見的驅(qū)動抽象模型,主要達成兩個目的。
1)提供標準化的器件驅(qū)動模型,開發(fā)者無需獨立開發(fā),通過配置即可完成驅(qū)動部署。
2)提供驅(qū)動模型抽象,屏蔽驅(qū)動與不同系統(tǒng)組件間的交互,使得驅(qū)動更具備通用型。
為了進一步簡化 OpenHarmony 系統(tǒng)驅(qū)動開發(fā),OpenHarmony 系統(tǒng) HDF 驅(qū)動框架支持多種驅(qū)動加載方式:
支持驅(qū)動動態(tài)加載和靜態(tài)加載,解除驅(qū)動代碼和框架間的直接代碼依賴,使得驅(qū)動程序可以獨立編譯和部署;
支持按需動態(tài)加載方式,避免設備驅(qū)動全量加載,可有效降低系統(tǒng)資源的占用。
本文主要分析 OpenHarmony 系統(tǒng)驅(qū)動加載過程,在正式介紹之前,首先了解 OpenHarmony 系統(tǒng)驅(qū)動架構(gòu)的組成、工作原理和機制,從而了解驅(qū)動加載的細節(jié)。
OpenHarmony系統(tǒng)
HDF驅(qū)動框架介紹
OpenHarmony 系統(tǒng) HDF 驅(qū)動框架組成
OpenHarmony 系統(tǒng) HDF 驅(qū)動框架主要由驅(qū)動基礎框架、驅(qū)動程序、驅(qū)動配置文件和驅(qū)動接口這四個部分組成。
1) HDF 驅(qū)動基礎框架提供統(tǒng)一的硬件資源管理,驅(qū)動加載管理以及設備節(jié)點管理等功能。驅(qū)動框架采用的是主從模式設計,由 Device Manager 和 Device Host 組成。
Device Manager 提供了統(tǒng)一的驅(qū)動管理,Device Manager 啟動時根據(jù) Device Information 提供驅(qū)動設備信息加載相應的驅(qū)動 Device Host,并控制 Host 完成驅(qū)動的加載。
Device Host 提供驅(qū)動運行的環(huán)境,同時預置 Host Framework 與 Device Manager 進行協(xié)同,完成驅(qū)動加載和調(diào)用。根據(jù)業(yè)務的需求 Device Host 可以有多個實例。
說明Device Host 顧名思義就是驅(qū)動宿主,提供驅(qū)動運行的環(huán)境。當驅(qū)動部署在用戶態(tài)時,Device Host 可以由獨立的進程進行承載,當驅(qū)動在部署在內(nèi)核態(tài)時,Device Host 僅表示邏輯隔離。Device Host 的劃分原則:Device Host 屬于一類設備聚合,如 Camera,Audio,Display 等。驅(qū)動程序是部署在一個 Device Host 還是部署在不同的 Device Host,主要考慮驅(qū)動程序之間是否存的業(yè)務耦合性,如果兩個驅(qū)動程序之間存在依賴,可以考慮將這部分驅(qū)動程序部署在統(tǒng)一 Host。
2) 驅(qū)動程序?qū)崿F(xiàn)驅(qū)動具體的功能,每個驅(qū)動由一個或者多個驅(qū)動程序組成,每個驅(qū)動程序都對應著一個 Driver Entry。Driver Entry 主要完成驅(qū)動的初始化和驅(qū)動接口綁定功能。
3) 驅(qū)動配置文件.hcs 主要由設備信息(Device Information)和設備資源(Device Resource)組成。Device Information 完成設備信息的配置。如配置接口發(fā)布策略,驅(qū)動加載的方式等。Device Resource 完成設備資源的配置。如 GPIO 管腳、寄存器等資源信息的配置。4) 驅(qū)動接口 HDI(Hardware Driver Interface )提供標準化的接口定義和實現(xiàn),驅(qū)動框架提供 IO Service 和 IO Dispatcher 機制,使得不同部署形態(tài)下驅(qū)動接口趨于形式一致。驅(qū)動接口主要存在以下幾種實現(xiàn):
當驅(qū)動以內(nèi)核組件部署時,客戶端程序訪問驅(qū)動程序需要通過 system call 方式調(diào)用,驅(qū)動接口通過 IO Service 請求將消息通過 system call 方式調(diào)用到內(nèi)核,并將消息分發(fā)到 IO Dispatcher 處理。
當驅(qū)動以用戶態(tài)服務形式部署時,客戶端進程訪問驅(qū)動進程需要通過 IPC 方式通信,IO Service 完成 IPC 通信的客戶端消息請求封裝,IO Dispatcher 完成驅(qū)動服務端消息請求封裝,客戶端消息通過 IPC 通信到達服務端并分發(fā)給 IO Dispatcher 處理。
當驅(qū)動部署在 RTOS(Real-Time Operating System)輕量化操作系統(tǒng)時,驅(qū)動接口和驅(qū)動程序之間采用的是 Function Call 方式調(diào)用,因此驅(qū)動接口僅提供定義,驅(qū)動接口實現(xiàn)由驅(qū)動程序提供。
HDF 驅(qū)動框架工作原理
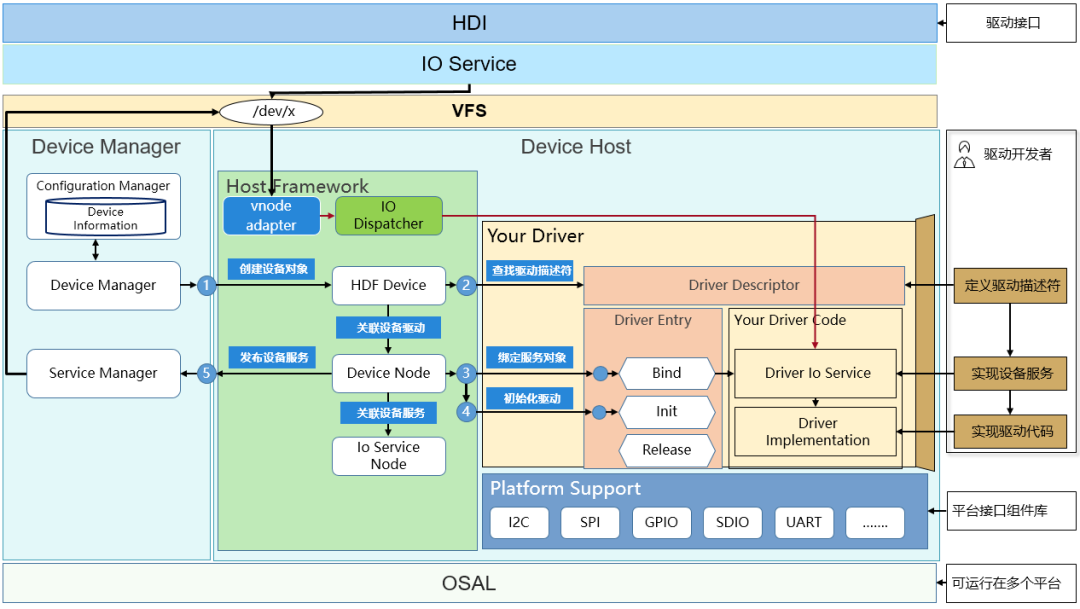
圖2 驅(qū)動框架工作原理
Device Manager 提供了統(tǒng)一的驅(qū)動加載管理機制和驅(qū)動接口發(fā)布機制。
當 Device Host 環(huán)境加載完成時,Device Manager 根據(jù) Device Information 信息,請求 Host 加載相應的驅(qū)動程序,Device Host 在收到請求時,進行以下操作:
1.根據(jù)請求加載設備信息,查找并加載指定路徑下驅(qū)動鏡像或從指定段地址(section)查找驅(qū)動程序入口。
2.查找驅(qū)動設備描述符,匹配對應的設備驅(qū)動。
3.當驅(qū)動匹配成功時,加載指定驅(qū)動程序鏡像。
4.Host Framework 在驅(qū)動程序鏡像加載成功后,調(diào)用驅(qū)動程序(Driver Entry)的綁定接口和初始化接口,實現(xiàn)與驅(qū)動程序的服務對象綁定,同時初始化設備驅(qū)動程序。
5.當 Device Information 配置中的服務策略要求對外暴露驅(qū)動接口時,驅(qū)動框架就將驅(qū)動程序的服務對象添加到對外發(fā)布的服務對象列表中,外部客戶端程序就可以通過此列表來查詢并訪問相應的服務接口。
驅(qū)動接口工作機制
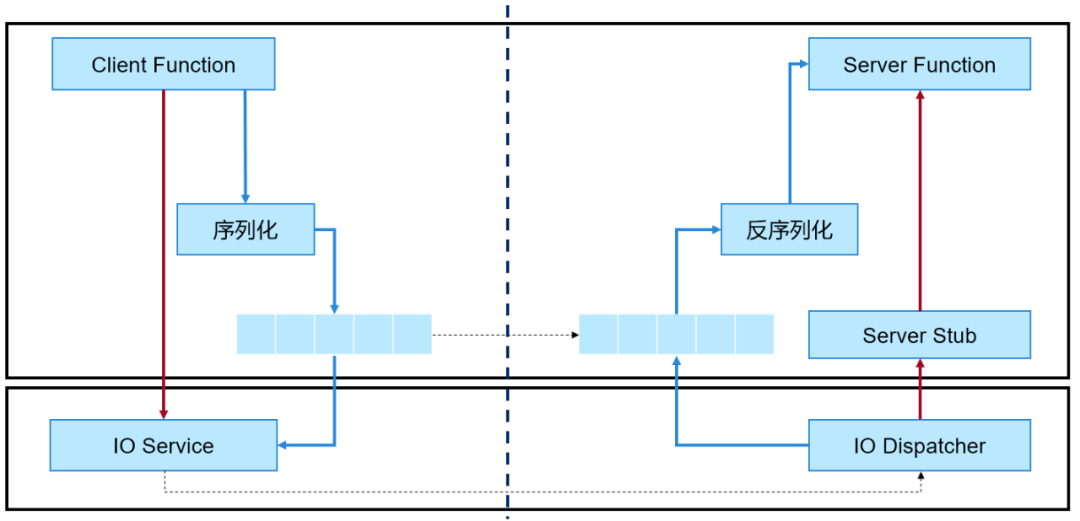
圖3 驅(qū)動接口工作機制
對于驅(qū)動接口實現(xiàn)而言:
當驅(qū)動部署在內(nèi)核態(tài)時,驅(qū)動接口部署在用戶態(tài),驅(qū)動實現(xiàn)在內(nèi)核態(tài),驅(qū)動接口和驅(qū)動實現(xiàn)之間通過 syscall 調(diào)用方式實現(xiàn)調(diào)用交互。
當驅(qū)動部署在用戶態(tài)時,驅(qū)動接口和驅(qū)動實現(xiàn)分別部署在兩個進程中。驅(qū)動接口和驅(qū)動實現(xiàn)之間通過 IPC 調(diào)用方式實現(xiàn)調(diào)用交互。
為了使客戶端和服務端驅(qū)動調(diào)用方式基本一致,驅(qū)動框架提供 IO Service 和 IO Dispatcher 機制屏蔽了調(diào)用消息傳遞方式的差異。
驅(qū)動接口實現(xiàn)統(tǒng)一采用遠程調(diào)用的方式實現(xiàn),客戶端驅(qū)動接口函數(shù)將請求序列化成內(nèi)存數(shù)據(jù),通過驅(qū)動框架提供的 IO Service 將消息發(fā)送到服務端處理,服務端在收到請求消息時通過 IO Dispatcher 機制將消息分發(fā)給消息處理函數(shù)處理,處理函數(shù)將反序列化內(nèi)存數(shù)據(jù)解析成相應的請求。這樣的做到好處是,開發(fā)者只需重點關注接口的定義,無需過多的關注如何實現(xiàn)不同平臺上接口適配。
驅(qū)動加載過程分析
OpenHarmony 系統(tǒng)驅(qū)動根據(jù)驅(qū)動程序部署的不同方式,存在兩種驅(qū)動加載方式:
動態(tài)加載方式:采用傳統(tǒng)的 so(共享庫)加載方式,驅(qū)動程序通過指定 Symbol 方式找到驅(qū)動函數(shù)入口進行加載。
靜態(tài)加載方式:采用將驅(qū)動程序通過 Scatter 編譯到指定的 Section,再通過訪問指定 Section 對應的地址,找到驅(qū)動函數(shù)入口進行加載。
下面結(jié)合一個 Sample 示例代碼,講解驅(qū)動加載過程,重點分析靜態(tài)加載方式下內(nèi)核態(tài)驅(qū)動加載過程。
實現(xiàn)驅(qū)動程序初始化接口在 HDF 驅(qū)動框架中,HdfDriverEntry 對象被用來描述一個驅(qū)動實現(xiàn)。
struct HdfDriverEntry { int32_t moduleVersion; const char *moduleName; int32_t (*Bind)(struct HdfDeviceObject *deviceObject); int32_t (*Init)(struct HdfDeviceObject *deviceObject); void (*Release)(struct HdfDeviceObject *deviceObject);};
編寫一個簡單的驅(qū)動,首先需要實現(xiàn)驅(qū)動程序 (Driver Entry)入口中的三個主要接口:
Bind 接口:實現(xiàn)驅(qū)動接口實例化綁定,如果需要發(fā)布驅(qū)動接口,會在驅(qū)動加載過程中被調(diào)用,實例化該接口的驅(qū)動服務并和 DeviceObject 綁定。
Init 接口:實現(xiàn)驅(qū)動的初始化,返回錯誤將中止驅(qū)動加載流程。
Release 接口:實現(xiàn)驅(qū)動的卸載,在該接口中釋放驅(qū)動實例的軟硬件資源。
int SampleDriverBind(struct HdfDeviceObject *deviceObject){ HDF_LOGE(“SampleDriverBind enter!”); static struct IDeviceIoService testService = { .Dispatch = SampleServiceDispatch, .Open = NULL, .Release = NULL, }; deviceObject-》service = &testService; return HDF_SUCCESS;}
int SampleDriverInit(struct HdfDeviceObject *deviceObject){ HDF_LOGE(“SampleDriverInit enter”); return HDF_SUCCESS;}
void SampleDriverRelease(struct HdfDeviceObject *deviceObject){ HDF_LOGE(“SampleDriverRelease enter”); return;}
struct HdfDriverEntry g_sampleDriverEntry = { .moduleVersion = 1, .moduleName = “sample_driver”, .Bind = SampleDriverBind, .Init = SampleDriverInit, .Release = SampleDriverRelease,};
HDF_INIT(g_sampleDriverEntry);
導出驅(qū)動程序入口符號實現(xiàn)驅(qū)動程序初始化后,需要將驅(qū)動程序入口通過驅(qū)動聲明宏導出,這樣驅(qū)動框架才能在啟動時識別到驅(qū)動程序的存在,驅(qū)動才能被加載:
#define HDF_INIT(module) HDF_DRIVER_INIT(module)
這里將 HDF_INIT 宏展開:
#define HDF_SECTION __attribute__((section(“.hdf.driver”)))#define HDF_DRIVER_INIT(module) const size_t USED_ATTR module##HdfEntry HDF_SECTION = (size_t)(&(module))
下面是其實現(xiàn)原理:
可以看到 HDF_INIT 宏是定義了一個“驅(qū)動模塊名+HdfEntry”的符號放到“.hdf.driver”所在 section,該符號指向的內(nèi)存地址即為驅(qū)動程序入口結(jié)構(gòu)體的地址。這個特殊的 section 將用于開機啟動時查找設備驅(qū)動。
添加設備配置
在設備對應的 device_info.hcs 添加 sample 驅(qū)動的配置:
sample_host :: host { hostName = “sample_host”; sample_device :: device { device0 :: deviceNode { policy = 2; priority = 100; preload = 1; permission = 0664; moduleName = “sample_driver”; serviceName = “sample_service”; } }}
在配置中定義的 device 將在加載過程中產(chǎn)生一個設備實例,通過 moduleName 字段指定設備對應的驅(qū)動名稱,從而將設備與驅(qū)動關聯(lián)起來,其中,設備與驅(qū)動可以是一對多的關系,即可以實現(xiàn)一個驅(qū)動支持多個同類型設備。
驅(qū)動啟動過程我們添加的驅(qū)動是如何被執(zhí)行的呢?簡單來說,在系統(tǒng)啟動時,驅(qū)動框架先啟動,通過解析配置文件獲取到設備列表,通過讀取“.hdf.drivers”段讀取到驅(qū)動程序(Driver Entry)列表,然后遍歷設備列表與驅(qū)動程序列表進行匹配,并加載匹配成功的驅(qū)動。驅(qū)動框架有兩大核心管理者:
DeviceManager 負責設備的管理,包括設備加載、卸載和查詢等設備相關功能。
DeviceServiceManager 負責管理設備發(fā)布的接口服務,提供接口服務的發(fā)布、查詢等功能。
驅(qū)動加載主要由 DeviceManager 主導,首先 DeviceManager 要解析配置文件中的 Host 列表,根據(jù) Host 列表中的信息來實例化對應的 Host 對象。Host 解析配置文件獲取到關聯(lián)的設備列表,遍歷設備列表去獲取與之匹配的驅(qū)動程序名稱,然后基于驅(qū)動程序名稱遍歷前面提到的.hdf.driver section 獲得驅(qū)動程序地址。
下面介紹具體過程。
獲取設備列表
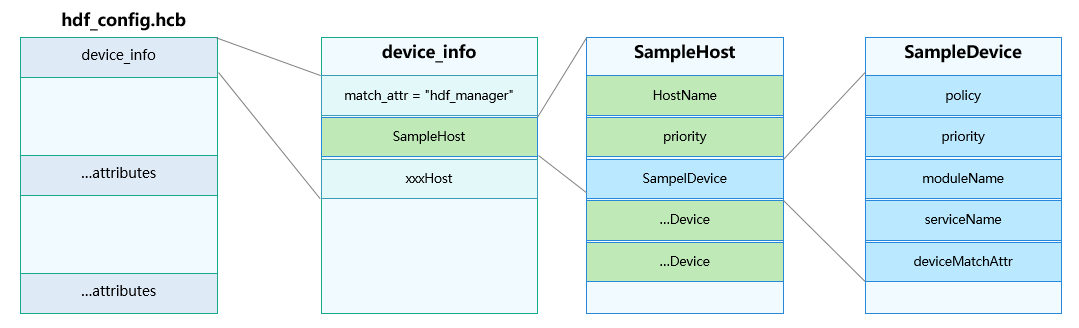
圖5 設備列表結(jié)構(gòu)
配置文本編譯后會變成二進制格式的配置文件,其中設備相關信息被存放在一個用“hdf_manager”標記的 device_info 配置塊中,host 的內(nèi)容以塊的形式在 device_info 塊中依次排列,host 塊中記錄了 host 名稱、啟動優(yōu)先級和設備列表信息。設備信息中的 moduleName 字段將用于和驅(qū)動程序入口中的 moduleName 進行匹配,從而為設備匹配到正確的驅(qū)動程序。
獲取驅(qū)動程序列表
HDF 驅(qū)動框架通過將驅(qū)動程序入口符號的地址集中存放到一個特殊的 section 來實現(xiàn)對驅(qū)動的索引,這個 section 的開頭和末尾插入了_hdf_drivers_start、_hdf_drivers_end 兩個特殊符號,用于標記這個 section 的范圍,兩個特殊符號之間的數(shù)據(jù)即為驅(qū)動實現(xiàn)指針。
驅(qū)動程序加載流程
Device Manager 遍歷設備列表,當查找到對應驅(qū)動實現(xiàn)時,為設備創(chuàng)建 Device 對象實例,如果設備配置中的 policy 字段為需要對外發(fā)布的驅(qū)動接口(SERVICE_POLICY_CAPACITY),那么驅(qū)動的 Bind 接口將首先被調(diào)用,用于關聯(lián)設備和服務實例。然后驅(qū)動的 Init 接口將被調(diào)用,用于完成驅(qū)動的相關初始化工作。如果驅(qū)動被卸載或者因為硬件等原因 Init 接口返回失敗,Release 將被調(diào)用,用于釋放驅(qū)動申請的各類資源。
總結(jié)
本次和大家分享了 OpenHarmony 系統(tǒng)驅(qū)動的主要設計思想,重點分析了內(nèi)核態(tài)驅(qū)動加載的過程,關于 OpenHarmony 系統(tǒng)驅(qū)動其他內(nèi)容,后續(xù)會有更多技術(shù)文章向大家持續(xù)分享,敬請期待。
編輯:jq
-
uart
+關注
關注
22文章
1270瀏覽量
103356 -
OSAL
+關注
關注
0文章
5瀏覽量
8884 -
HDF框架
+關注
關注
0文章
10瀏覽量
2891 -
OpenHarmony
+關注
關注
28文章
3836瀏覽量
18209
原文標題:OpenHarmony HDF 驅(qū)動框架介紹和驅(qū)動加載過程分析
文章出處:【微信號:HarmonyOS_Dev,微信公眾號:HarmonyOS開發(fā)者】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
迅為RK3568開發(fā)板實操-HDF驅(qū)動配置UART-修改HCS配置
迅為RK3568開發(fā)板驅(qū)動開發(fā)指南helloworld驅(qū)動實驗-驅(qū)動的基本框架
【北京迅為】iTOP-RK3568開發(fā)板鴻蒙OpenHarmony系統(tǒng)南向驅(qū)動開發(fā)實操-HDF驅(qū)動配置UART

北京迅為iTOP-RK3568開發(fā)板OpenHarmony系統(tǒng)南向驅(qū)動開發(fā)實操-HDF驅(qū)動配置LED
北京迅為RK3568開發(fā)板OpenHarmony系統(tǒng)南向驅(qū)動開發(fā)內(nèi)核HDF驅(qū)動框架架構(gòu)
迅為RK3568開發(fā)板篇Openharmony配置HDF控制UART-實操-HDF驅(qū)動配置UART-修改HCS配置
迅為RK3568開發(fā)板篇OpenHarmony實操HDF驅(qū)動控制LED-編寫應用APP
迅為RK3568開發(fā)板篇OpenHarmony實操HDF驅(qū)動控制LED-添加內(nèi)核編譯
迅為RK3568開發(fā)板篇OpenHarmony實操HDF驅(qū)動控制LED-編寫內(nèi)核 LED HDF 驅(qū)動程序
迅為RK3568開發(fā)板篇OpenHarmony配置HDF驅(qū)動控制LED-新增 topeet子系統(tǒng)
迅為RK3568開發(fā)板篇OpenHarmony配置HDF驅(qū)動控制LED-配置創(chuàng)建私有配置文件
迅為RK3568開發(fā)板篇OpenHarmony配置HDF驅(qū)動控制LED-修改HCS硬件配置
OpenHarmony程序分析框架論文入選ICSE 2025





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論