") 多傳感器融合技術(shù)的應用方案
多傳感器融合技術(shù)的應用方案

“INDEMIND:隨著機器人的應用領(lǐng)域不斷拓展,對機器人的環(huán)境感知能力的要求也在不斷提升,而要解決環(huán)境感知問題,傳感器技術(shù)則是最重要的應用支撐技術(shù)之一,它對于機器人的意義亦如人眼對于人,但與人眼不同的是,它的構(gòu)成主要由傳感器和算法組成,并伴隨著機器人發(fā)展,已從單傳感器向多傳感器融合迭代。”
由于機器人不斷滲透到各行各業(yè),面對的外部環(huán)境越來越復雜,對機器人的精度、穩(wěn)定性、智能化提出了新的要求,而單傳感器或采用多個(種)傳感器卻僅是從多個側(cè)面孤立地獲取目標信息的方式,前者不僅效率較低下,且獲取的信息量有限,而后者不斷增加傳感器的做法,更會增加系統(tǒng)的復雜度,對平臺算力要求提高,且割斷了各傳感器信息間的內(nèi)在聯(lián)系,丟失了信息經(jīng)有機組合后可能蘊含的深層有效信息,造成信息資源浪費,甚至可能導致決策失誤。
在多重因素影響下,發(fā)展多傳感器融合技術(shù)便表現(xiàn)出了它的必然性。事實上,多傳感器融合技術(shù)從字面上可知并非另辟蹊徑,而是在采用多個(種)傳感器的基礎(chǔ)上,進一步開拓和完善而來,原理是借助算法對感知相關(guān)要素信息的冗余或互補信息進行分析、建模、解算、融合、估計和補償,最終輸出更為準確、豐富、可靠的信息。
多傳感器融合技術(shù)的應用,對于系統(tǒng)的容錯能力、信息精度、信息的可信度&豐富度都有了明顯提升,這對于機器人的意義無比重要。目前,市面上多傳感器融合技術(shù)多是以激光雷達為主導的技術(shù)方案,并根據(jù)架構(gòu)組成,又主要分為兩種。
一種是以單線激光雷達主導+IMU+里程計或其它傳感器的融合方案,采用松/緊耦合方式,有著簡單、成熟的技術(shù)優(yōu)勢,是市面上較為常見的融合技術(shù)方案,然而這類方案的缺點在于,一是環(huán)境適應能力較差,對于環(huán)境特征單一的長走廊等場景,誤差較高,容易偏離路徑,二是重定位能力差,運行過程中一旦丟失位置,難以重新定位。
另一種是以多線激光雷達為主導的融合方案,與其它傳感器采用松/緊耦合方式組合,得益于多線激光雷達,可獲取到環(huán)境物體的三維信息,使得這類方案的環(huán)境感知能力得到顯著提升,且在功能表現(xiàn)上,同樣有著激光雷達精度高和穩(wěn)定性高的特點,然而需要提到的是,多線激光雷達在保留了傳統(tǒng)優(yōu)勢的同時,也有著激光雷達類似的局限性,且一旦出現(xiàn)故障,會導致整個系統(tǒng)宕機,目前這類方案主要應用于大多數(shù)商用機器人,不過其高昂的成本也讓大多數(shù)企業(yè)難以承受。
因此,在此背景下,行業(yè)一方面在進一步完善激光雷達方案的同時,另一方面也在探索視覺方案。目前,以視覺為主導的融合技術(shù)方案,在市面上雖然還相對較少,但隨著計算機視覺技術(shù)多年來的發(fā)展,已經(jīng)有了成熟方案,INDEMIND的多傳感器融合技術(shù)便是其中之一。
與激光雷達方案不同,INDEMIND多傳感器融合技術(shù)在實現(xiàn)上,設計了以視覺傳感器為主導的標準化、模塊化的多傳感器融合架構(gòu),通過遵循INDEMIND的標準定義接口,可快速加入IMU、里程計、激光、GNSS等多種傳感器,實現(xiàn)“積木式”加裝,結(jié)合雙目立體視覺技術(shù),能夠?qū)崿F(xiàn)高精度、高穩(wěn)定性、低成本的3D環(huán)境感知,走出了不同于激光雷達方案的All IN ONE新路徑。
眾多周知,信息量豐富是視覺的優(yōu)勢,但也導致對算力要求的大幅提升。由于需要處理的環(huán)境信息量巨大,對于平臺的算力要求極高,同時視覺受環(huán)境光線影響嚴重,如何解決這些難題,是走通視覺方案的關(guān)鍵。
因此,INDEMIND在研發(fā)過程中,對它們進行了長期針對性解決。
? 降低算力要求
算法&硬件優(yōu)化:采用增量優(yōu)化的方式,分段處理,并在區(qū)段間建立先驗信息,有效降低了平臺計算壓力,提高計算效率。
硬件加速:在硬件上,對于視覺處理采用neon加速、GPU加速、DSP加速等方式,提升計算性能,降低算力要求。
? 提高性能
傳感器更豐富:基于INDEMIND多傳感器融合架構(gòu),可融合超過4種以上的傳感器,通過緊耦合方式組合,對于環(huán)境的容忍度更高,能夠保障在部分傳感器出現(xiàn)異常的同時,系統(tǒng)仍能保持正常運行,提高魯棒性。
誤差補償:為了提升精度,INDEMIND對系統(tǒng)中的視覺、IMU、里程計等每個傳感器都進行了實時誤差建模、估計及補償,能夠有效保障在實時運行過程中的精度和穩(wěn)定性。
野值判定與剔除:由于傳感器較多,視覺、激光、里程計、IMU等不同傳感器產(chǎn)生的噪點,對于系統(tǒng)的穩(wěn)定性和精度影響較大,因此,INDEMIND對于各個傳感器的數(shù)據(jù),進行了野值判定及剔除,進一步增進系統(tǒng)對于原始傳感器數(shù)據(jù)的容錯能力,提升最終的穩(wěn)定性和精度。
與此同時,基于INDEMIND立體視覺技術(shù),可獲取豐富的3D環(huán)境信息,配合上層決策,對于實現(xiàn)智能避障、路徑規(guī)劃、人機交互提供了必要的前提條件。
目前,經(jīng)過長期驗證,搭載INDEMIND多傳感器融合技術(shù)的測試機器人,定位精度可達厘米級,<5cm(RMS),達到激光融合方案的同等精度水平。在智能避障方面,能夠?qū)崿F(xiàn)三維立體避障,精度<1%,結(jié)合INDEMIND智能決策引擎技術(shù),可實現(xiàn)策略化避障,提升安全決策水平。同時,在交互方面,基于智能決策引擎技術(shù),能夠根據(jù)指令實現(xiàn)目標跟蹤、指定區(qū)域作業(yè)等多種個性化功能,提升機器人人機、物機交互能力。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2565文章
52973瀏覽量
767209 -
測試
+關(guān)注
關(guān)注
8文章
5695瀏覽量
128817 -
機器人
+關(guān)注
關(guān)注
213文章
29728瀏覽量
212813
發(fā)布評論請先 登錄
Melexis壓力傳感器技術(shù)的應用領(lǐng)域
AGV機器人如何實現(xiàn)毫秒級避障?深度解析多傳感器融合的核心技術(shù)

求助,關(guān)于傳感器融合庫的使用問題求解
融合視覺傳感器廠商銳思智芯完成B輪融資
ADI傳感器進軍人形機器人等,多款方案受關(guān)注

康謀應用 | 基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng)

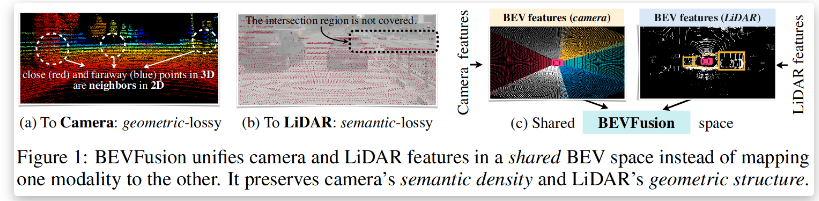
BEVFusion —面向自動駕駛的多任務多傳感器高效融合框架技術(shù)詳解
如何利用傳感器融合改進工業(yè) 4.0 生產(chǎn)的流程和物流
京瓷發(fā)布全球首款“攝像頭-激光雷達”融合傳感器
雨量水位數(shù)據(jù)采集終端機RTU:多傳感器融合,水文監(jiān)測數(shù)據(jù)遠程查看
多傳感器融合在自動駕駛中的應用趨勢探究

智能馬桶腳感方案 TOF傳感器選型推薦
精密制造的革新:光譜共焦傳感器與工業(yè)視覺相機的融合
常用遙感傳感器中成像的傳感器是什么
藍牙數(shù)據(jù)模塊多連接方案讓傳感器更加智能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論