") 深部目標姿態(tài)估計的不確定性量化研究
深部目標姿態(tài)估計的不確定性量化研究
NVIDIA 德克薩斯大學,奧斯丁和加州理工學院的研究人員開發(fā)了一種簡單、高效、即插即用的不確定性量化方法,用于六自由度(自由度)物體姿態(tài)估計任務,使用 K 預先訓練的估計器與不同的體系結(jié)構(gòu)和/或訓練數(shù)據(jù)源的集合。
研究人員在 2021 年國際機器人與自動化會議( ICRA 2021 )上發(fā)表了他們的論文“ 用于深部目標姿態(tài)估計的快速不確定性量化( FastUQ ) ”。
FastUQ 主要研究深部目標姿態(tài)估計的不確定性量化問題。在基于深度學習的目標姿態(tài)估計中(參見 NVIDIA DOPE ),一個很大的挑戰(zhàn)是基于深度學習的姿態(tài)估計器 MIG 不能對其姿態(tài)預測過于自信。
例如,下面的兩個圖是操縱任務中來自攝影模型的“番茄醬”對象的姿勢估計結(jié)果。兩個結(jié)果都很有把握,但左一個是不正確的。

解決的另一個挑戰(zhàn)是 sim2real 缺口。通常,基于深度學習的姿態(tài)估計器是從合成數(shù)據(jù)集(由 NVIDIA 的光線跟蹤渲染器 NViSII )中訓練出來的,但是我們希望將這些估計器應用于現(xiàn)實世界并量化不確定性。例如,左圖來自合成 NViSII 數(shù)據(jù)集,右圖來自真實世界。

在本計畫中,我們提出一種基于集合的方法來快速量化基于深度學習的姿態(tài)估計器的不確定性。這一想法在下面兩幅圖中得到了證明,在左邊的圖中,集合中的深層模型彼此不一致,這意味著更多的不確定性;在右圖中,這些模型彼此一致,反映了較少的不確定性。
這項研究絕對是跨學科的,由 NVIDIA 的不同研究團隊共同努力解決:
由 Anima Anandkumar 領導的人工智能算法團隊和西雅圖的 NVIDIA 人工智能機器人研究實驗室正在研究不確定性量化方法
Jan Kautz 領導的學習和感知研究團隊負責訓練深部物體姿態(tài)估計模型,并從 NVIDIA 的光線跟蹤渲染器 NViSII 提供真實感合成數(shù)據(jù)
為了訓練深度估計和生成高保真的真實感合成數(shù)據(jù)集,團隊使用 NVIDIA V100GPU 和 NVIDIA OptiX ( C ++ / CUDA 后端)進行加速。
FastUQ 是一種新的用于深部目標姿態(tài)估計的快速不確定性量化方法,具有高效、即插即用的特點,支持一類通用的姿態(tài)估計任務。這項研究在自主駕駛和一般自主性方面具有潛在的重大影響,包括更穩(wěn)健和安全的感知,以及不確定性感知控制和規(guī)劃。
關于作者
Yuke Zhu 是 NVIDIA 人工智能算法團隊的研究員。他獲得了碩士和博士學位。斯坦福大學的學位。他的博士學位。論文圍繞閉合感知 - 動作回路,使機器人智能更具普遍性,更適用于控制較少的環(huán)境。他的研究處于機器人學、機器學習和計算機視覺的交叉點。他開發(fā)了感知和控制的計算方法,產(chǎn)生了智能機器人的行為。通過他的工作,他渴望教會機器人理解周圍的視覺世界并與之互動。他的專業(yè)知識得到了各種新聞媒體、領先科技機構(gòu)和獎項機構(gòu)的關注。他的作品曾多次獲得獎項和提名,包括 ICRA 2019 年最佳會議論文獎。他的作品曾被麻省理工學院技術(shù)評論和斯坦福新聞等媒體報道。
審核編輯:郭婷
-
機器人
+關注
關注
213文章
29537瀏覽量
211759 -
NVIDIA
+關注
關注
14文章
5258瀏覽量
105861 -
人工智能
+關注
關注
1804文章
48788瀏覽量
246949
發(fā)布評論請先 登錄
應用分享 | 精準生成和時序控制!AWG在確定性三量子比特糾纏光子源中的應用
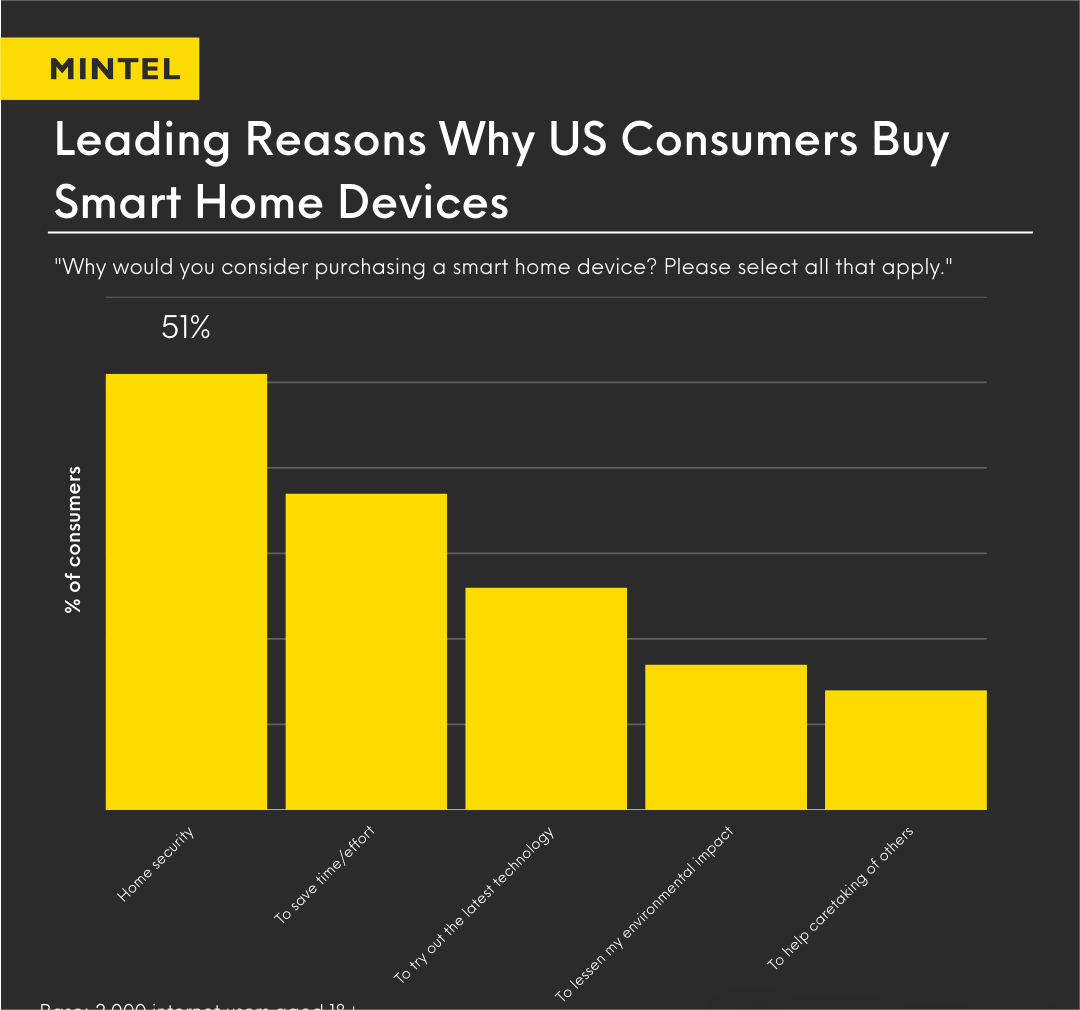
從科幻到現(xiàn)實:智能家居如何重塑我們的生活方式?
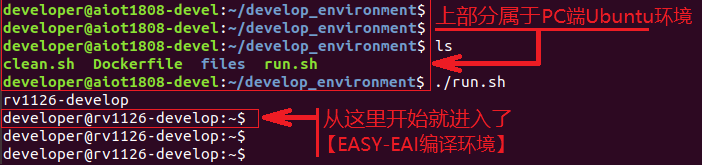
基于RV1126開發(fā)板的人臉姿態(tài)估計算法開發(fā)
優(yōu)刻得:與DeepSeek模型適配,業(yè)績貢獻存不確定性
字節(jié)豆包大模型團隊成立AGI長期研究團隊Seed Edge
字節(jié)跳動啟動AGI長期研究計劃Seed Edge
今日看點丨字節(jié)啟動 Seed Edge,加碼 AGI 研究;SemiQ推出1700 V SiC MOSFET系列
AFE5808A串并變換之后數(shù)據(jù)錯位,輸出結(jié)果具有不確定性,為什么?
全球首張!賽思時鐘系統(tǒng)賦能山東省確定性網(wǎng)絡,夯實數(shù)字未來新基座
科技云報到:數(shù)字化轉(zhuǎn)型,從不確定性到確定性的關鍵路徑

計及多重不確定性的規(guī)模化電動汽車接入配電網(wǎng)調(diào)度方法及解決方案
破局不確定性,SENSOR CHINA 2024解鎖產(chǎn)業(yè)發(fā)展新機遇

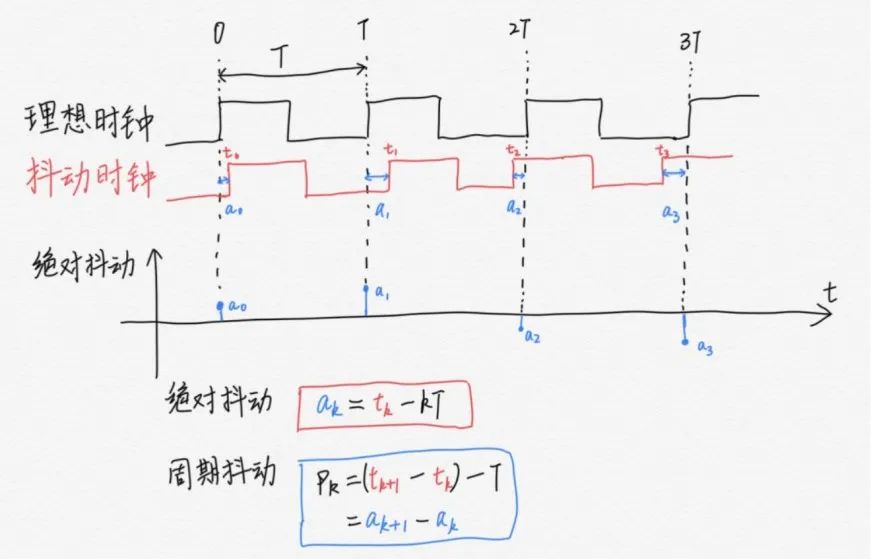
抖動的概念和類型 量化時域抖動、隨機抖動和頻域抖動的方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論