 KUKA機器人帶FDS擰緊設備的TCP校準應用
KUKA機器人帶FDS擰緊設備的TCP校準應用
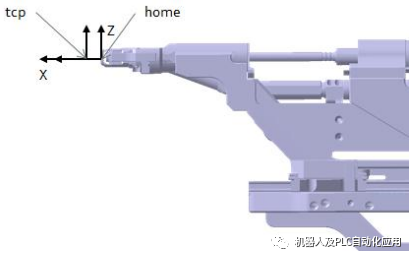
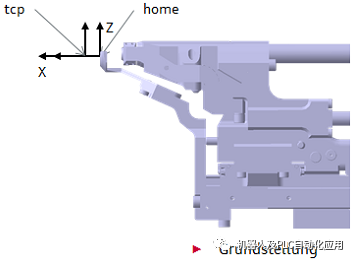
起始位置:
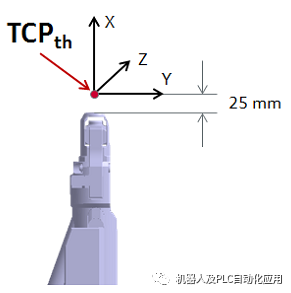
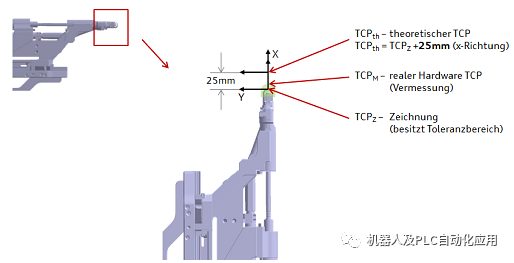
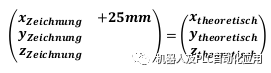
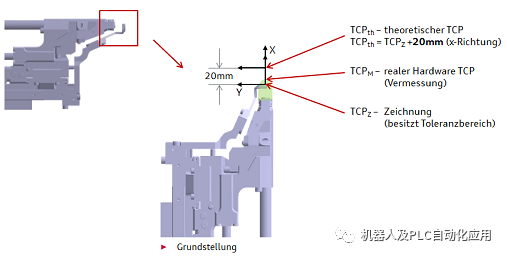
TCP理論:
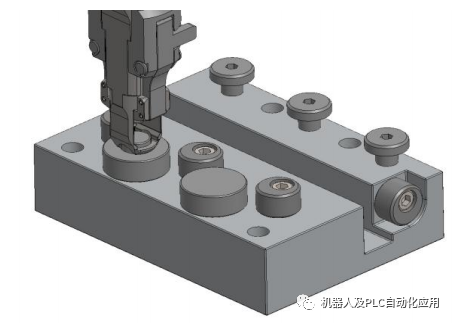
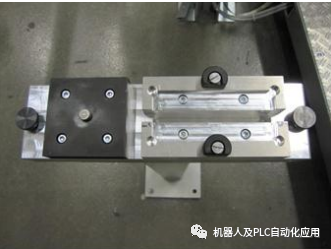
集成鐘形螺絲刀測試單元:
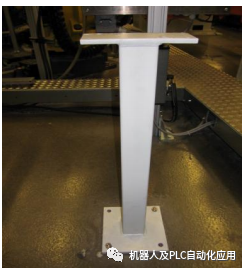
機械要求:
創建一個堅固的支架(高度約 60 厘米)。根據系統規格,支架也可以設計不同。但是,組裝應始終水平進行。
2. 將測試單元安裝在支架上。將偏心輪設置為測試面板的寬度,必要時旋轉止動塊。
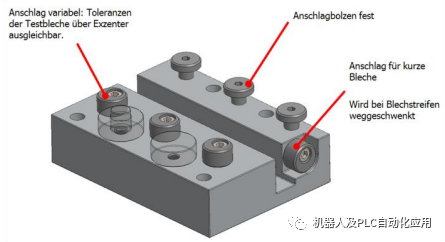
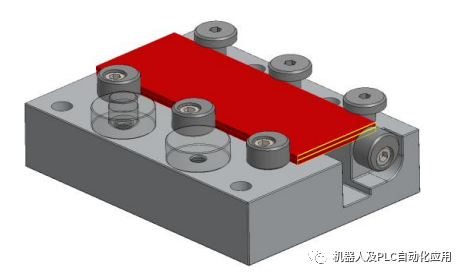
3. 插入托盤。設備準備好測試螺釘連接。

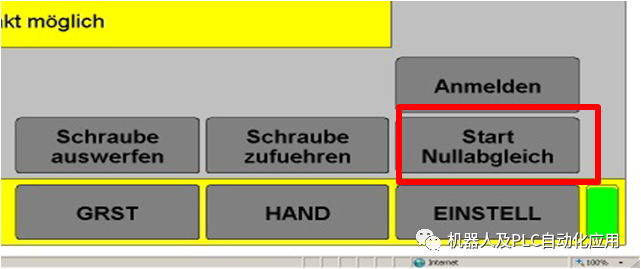
4.調整運行
- 將機器人放置在行駛區域上方以進行調整運行
- 觸發調整運行
- 控件接受所選(停靠)工具的當前工具數據
5.檢查TCP
- 將機器人放置在行駛區域上方以進行 TCP 測試
- 彈出螺絲
- 擴展壓緊裝置
- 目視檢查壓緊裝置的窗口是否在行駛面上的螺栓中心,必要時進行修正
起始位置:
創建 UP 107 進行深度調整。
SPSMAKRO541 = EIN 噴釘
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=0 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: -- 開始進行深度校驗 --
4: SPSMAKRO542 = EIN
5: WARTE BIS E23
6: A23 = EIN
UP - 名稱:“平衡深度”
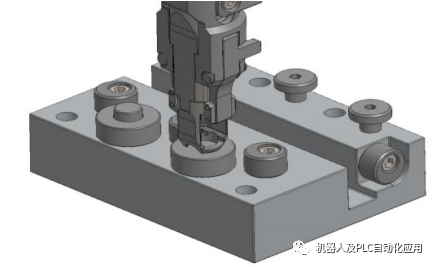
將螺釘頭移動到測試單元的紅色位置之一。
保存所選點上方 20mm 的位置。
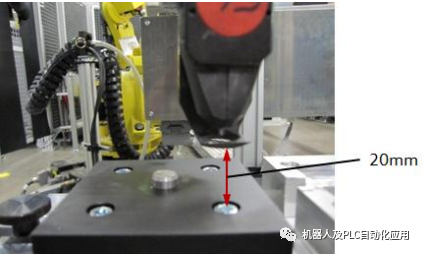
然后由處理裝置執行實際的深度調整。起始位置可用作開始和結束位置。
2. 創建 UP 108 用于試擰。
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS !E16 & E23
4: TECH3_ FDS Zange = Nr1 ProgNr = 5Fzg-Typ = 81 Weg = 0 [1/10 mm] PktNr_SPS = 5 EIN
5: SPSMAKRO540 = EIN擰緊
6: WARTE BIS E23
7: A23 = EIN
8: FB PSPS = M30 & M140 & E77 & E80
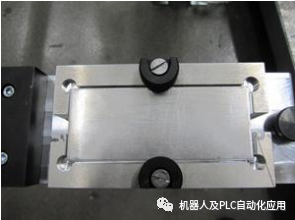
UP——名稱:“試螺紋連接”
靠近第一個點20mm的距離擰緊,至于深度調節。然后發送到程序號 29(用于所有 4 個螺釘連接)并調用螺釘宏。測試表通常在螺絲刀的控制柜中。
3. 為快速檢查 TCP 創建 UP 109。
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=0 SPSTrig=0[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: -- 噴釘--
4: SPSMAKRO541 = EIN
5: WARTE BIS E23
6: A23 = EIN
7: FB PSPS = M30 & M140 &F985
PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=0 SPSTrig=0[1/100s] P
1: FB PSPS = M30 & M140 & F985
-- TCP 位置 --
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=0 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS E17
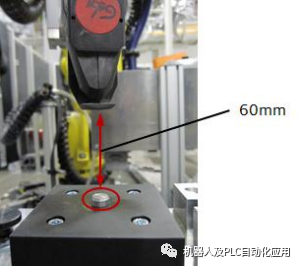
UP - 名稱:“TCP 螺絲刀”
將帶有固定板的螺絲刀插入底板的螺栓上并精確居中。然后在 X 方向上移動負 60mm 并接受這一點。以后檢查 TCP 時,螺絲刀將被驅動到這個編程點。然后關閉螺絲刀的壓縮空氣。無壓螺絲刀現在用手朝螺栓方向引導。
因此,可以在沒有崩潰風險的情況下檢查 TCP 的位置!
4. 創建 UP 110 進行精確測量。
UP - 名稱:“測量螺絲刀”
所需的測試尖端安裝在螺絲刀頭上。必要的轉換時間約為 5 分鐘。
在內卡蘇爾姆的 AUDI AG,測試探針不在現場,但在維護 D3/D4 期間必須在倉庫中挑選。這與提款單一起記錄。這在其他 AUDI AG 地點可能會有不同的處理方式。

兩個尖端必須完全在彼此之上驅動,這一點被接管。無需進一步編程。
審核編輯 :李倩
-
TCP
+關注
關注
8文章
1398瀏覽量
80454 -
KUKA機器人
+關注
關注
4文章
144瀏覽量
9500
原文標題:KUKA機器人帶FDS 擰緊設備的TCP校準應用
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例

盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
EtherCAT轉Modbus TCP:機器人產業的“語言”之困






 工商網監
工商網監
評論