 CAN總線系統架構在車聯網領域中的應用
CAN總線系統架構在車聯網領域中的應用
在汽車行業引入新技術是一項風險和成本密集型工作。特別是在車聯網領域,這通常意味著在經過驗證的機制、功能的增長和由于更先進的總線系統而增加的帶寬之間取得平衡。過去幾年實現的可靠性始終是標準,在任何情況下都不得冒險。最近對網絡測試的需求大幅增加,這代表了新一代汽車硬件和軟件組件批準過程中的重要一步。
迄今為止,CAN 總線已被證明是一種高效且穩健的通信媒介。憑借靈活的數據 (FD) 速率理念以及由此增加的帶寬,CAN 總線系統架構的存在理由得到了顯著擴展。日志中的變化、更高的數據長度和各種比特率需要新的或經過調整的測試用例和測試系統。
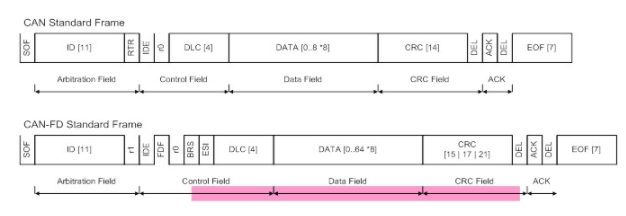
【圖1 | CAN幀布局]
網絡測試
測試總線參與者的網絡功能的方法在各個原始設備制造商的規范和測試標準中定義。
除了總線物理特性之外,還要測試各種控制器參數,例如比特率和掃描時間。通過評估總線通信,對照數據定義(例如 ID《 DLC、循環時間、計數器的信號測試和校驗和)測試控制單元的傳輸消息。
典型的測試用例包括確定工作電壓限制、功耗和發射啟動,以及以脈沖和斜坡形式對工作電壓故障的反應。
測試 CAN 錯誤管理是 CAN 控制單元測試中的一項重要測試任務。為了檢查總線關閉處理,控制單元的傳輸消息被中斷,并且在等待階段評估發送和等待階段、重新初始化和接收準備情況。網絡管理的測試用例符合所使用的網絡管理類型(OSEK-NM、NMHigh、AutoSAR)并檢查狀態轉換和喚醒原因,例如維護空閑總線和定時。車載診斷的測試復合體包含例如傳輸日志測試、CAN 錯誤管理(監控開始、電壓閾值、消息故障、信號錯誤、總線關閉)和診斷服務檢查。
CAN FD接口測試
CAN FD本質上是對日志級別的擴展。這就是為什么經典 CAN 的測試規范中的大多數點也適用于 CAN FD。下面簡要說明幾個需要額外執行的特性或測試用例。
兼容性
CAN FD 與 CAN 完全兼容,即每個 CAN FD 控制器都可以發送和接收經典 CAN 幀。但是,僅支持 CAN 標準的控制器無法解碼 CAN FD 幀。
在 CAN FD 驗收測試中,無論通過控制單元發送或接收的幀類型如何,都必須始終正確確認 (ACK)。由于錯誤識別的不規則性而導致的錯誤幀不得出現在總線上。
數據長度
最大應用程序數據長度從 8 個字節增加到 64 個字節。必須為所有發送的消息檢查這些值。這以與經典 CAN 相同的方式發生,在不同條件下進行跟蹤記錄和分析,并根據數據定義中的規范進行后續測試。不正確的數據長度會導致接收者的功能受限,因此必須在相應的測試用例中進行模擬以識別故障。
比特率
CAN 總線上無故障通信的重要參數是比特率。與經典 CAN 不同,CAN FD 以靈活的比特率工作,即在一幀內具有不同的傳輸速度。在仲裁階段,數據以高達 1 Mbit/s 的速度發送。在數據階段,它 以高達 10 Mbit/s 的速度發送。例如,典型的組合是 500 和 2000 kbit/s。基于硬件的解決方案適用于傳輸端測試。這使得可以在一幀或多幀中同時并連續地測量兩種比特率。高分辨率、CAN FD 觸發示波器也適用于幀的說明性測量。
比特率開關 (BRS)
幀控制字段中的新 BRS 位表示以高比特率(隱性比特)或低比特率(顯性比特)發送。通過跟蹤記錄和分析,將控制單元發送的幀與制造商規范或數據定義進行比較和評估。通常,必須始終以高比特率發送所有 FD 幀。
在接收端,控制單元不能區分快幀和慢幀。為此,單個或所有 FD 接收消息在特定時間段內既快又慢地發送。這既不能導致總線上的錯誤幀,也不能出現額外的錯誤存儲器條目。
錯誤狀態指示器 (ESI)
CAN FD 中的 ESI 位顯示 CAN FD 控制器的當前錯誤狀況。顯性值指示錯誤主動,隱性值錯誤被動。
因此,在有關 CAN FD 錯誤管理的測試用例中,除了對達到 busoff 的反應的常見測試用例外,還必須強制執行和評估另外兩個錯誤條件。為此,需要一個靈活、可配置的壓力和觸發模塊,它可以中斷任何 CAN 和 CAN FD 消息。
比特率切換
從慢比特率切換到快比特率發生在 BRS 位的采樣點,從快比特率切換到慢比特率在 CRC 定界符的采樣點或直接在識別錯誤后進行。因此,錯誤幀總是以標稱(慢)比特率發送。碼率切換必須測試發送端和接收端的故障識別。
掃描時間
CAN FD 控制器在明確定義的時間點確定每個發送或接收位的值。此值必須根據制造商規范進行配置。由于比特率切換,CAN FD 有兩種不同的掃描時間。
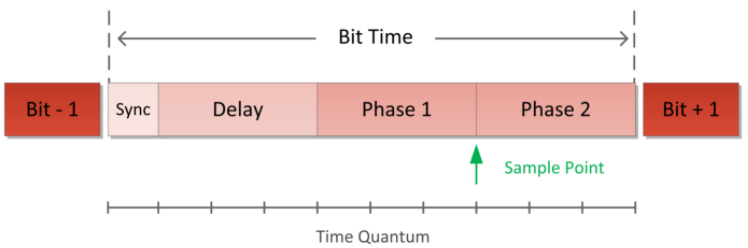
【圖2 | CAN位時序]
可以借助各種方法確定掃描時間,包括根據專利 DE102009039200 A1 的方法。
對于 CAN FD,需要顯著提高幀生成精度并調整信號生成以測量所有可能幀類型的掃描時間(CAN/CAN FD、標準/擴展、ISO/非 ISO) 。
硬件
要執行的控制單元測試的類型和范圍決定了所需的硬件資源。
為了能夠確定與控制單元的通信的安全性和容錯性,必須將各個通信參數移動到允許的公差范圍的限制范圍內并超出該范圍。
休息總線控制器
CAN 或 CAN FD 的通信矩陣可以選擇定義為 DBC、FIBEX 或 AUTOSAR 系統描述格式。G?PEL 61 系列電子平臺的 restbus 控制器具有模塊化且因此可擴展的測試資源概念。這使得對各個測試對象的靈活調整成為可能。
對于 CAN FD 通信,TJA1044GT 收發器與集成的 BOSCH CAN FD IP 內核結合使用,并允許高達 10 Mbit/s 的比特率。針對 CAN FD 相應擴展了 restbus 模擬(基于幀或根據 AUTOSAR)、傳輸和診斷日志或網絡管理的功能。
壓力、觸發和分析模塊
使用壓力、觸發和分析模塊 Basic CON 4055,可以專門操作和分析 CAN/CAN FD 通信。這為進行精確的日志測試創造了機會。Basic CON 4055 可以中斷任何 CAN/CAN FD 消息,并在四個可配置端口上為此提供 250 多個獨立的消息觸發器,以及用于外部資源使用的觸發器輸入和輸出。
分析功能還包括 CAN/CAN FD 通信的比特率測量。對于 CAN FD,可以選擇同時測量兩種比特率(仲裁和數據階段)。
該模塊用于當前的接口和網絡測試儀。
信號發生器
掃描時間的確定涉及根據 DE102009039200 A1 的過程中數據鏈路層中的錯誤處理。此處使用的發送器必須能夠生成修改后的 CAN/CAN FD 消息。消息的處理通過數據區域中單個位的部分反轉來進行。
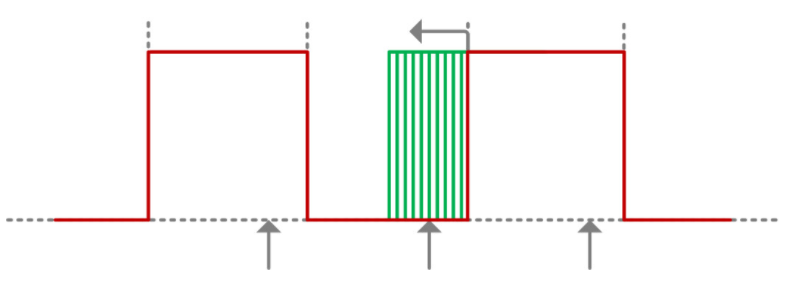
【圖4 | 掃描時間確定原理圖解】
然后 CAN/CAN FD 參與者通過錯誤電報對識別的 CRC 錯誤做出反應。
為了精確地進行百分之一的測定,使用了信號發生器,它可以以相應的分辨率、精度和速度發送測試信號。
概括
對于CAN FD,大部分汽車廠商的測試規范仍然有效,不受限制。在某些測試用例中需要升級,而另一些則是全新添加的。現有的測試系統將在硬件和軟件領域進行調整和升級。在硬件上,這主要影響 restbus 控制器和壓力和觸發模塊,而在軟件上,則影響 CAN FD 日志的完整集成。
作者:Steffen Rauh,Andreas Schmidt
審核編輯:郭婷
-
控制器
+關注
關注
112文章
16458瀏覽量
179506 -
觸發器
+關注
關注
14文章
2008瀏覽量
61360 -
信號發生器
+關注
關注
28文章
1480瀏覽量
109042
發布評論請先 登錄
相關推薦
CAN總線技術的未來趨勢
如何使用Arduino實現CAN總線通信


【CAN總線知識】深度解析CAN-FD與CAN協議的差別







 工商網監
工商網監
評論