") 第二代的蘋(píng)果采摘開(kāi)發(fā)平臺(tái)已經(jīng)發(fā)布
第二代的蘋(píng)果采摘開(kāi)發(fā)平臺(tái)已經(jīng)發(fā)布
去年史河機(jī)器人發(fā)布了一個(gè)介紹機(jī)器人蘋(píng)果采摘的視頻吸引了很多朋友的關(guān)注:
時(shí)隔一年,第二代的蘋(píng)果采摘開(kāi)發(fā)平臺(tái)已經(jīng)發(fā)布!
此次發(fā)布的蘋(píng)果采摘開(kāi)發(fā)平臺(tái)在上一代的基礎(chǔ)上做了全方位的升級(jí)優(yōu)化,可實(shí)現(xiàn)更加智能的規(guī)劃、識(shí)別、抓取等功能,那它究竟在哪些方面得到了進(jìn)化升級(jí)呢?讓我們先通過(guò)一段實(shí)拍視頻來(lái)一探究竟!
外練筋骨皮—外觀結(jié)構(gòu)上的升級(jí)優(yōu)化
作為定位于科研開(kāi)發(fā)平臺(tái)的產(chǎn)品,MR1000-Xarm外觀上的升級(jí)優(yōu)化不是 “徒有其表”,而是以用戶體驗(yàn)感為出發(fā)點(diǎn),通過(guò)提升客戶使用時(shí)的操作便利性、安全性來(lái)達(dá)到助力科研、高校的客戶快速開(kāi)啟研究項(xiàng)目的目的。
用一句話形容此次外觀上的升級(jí),那便是:一體化設(shè)計(jì),配置更豐富,布局更合理。
史河蘋(píng)果采摘機(jī)器人的本質(zhì)是復(fù)合機(jī)器人,從下圖可以看到,自主研發(fā)的高性能底盤(pán)、工控系統(tǒng)、定位系統(tǒng)、雷達(dá)、六軸機(jī)械臂、3D視覺(jué)、電動(dòng)夾持器等部件都有配備,可以說(shuō)是堆料十足,配置拉滿,而一體化設(shè)計(jì)理念的運(yùn)營(yíng)使得各個(gè)部件都井井有條地分布在各自應(yīng)該“待”的地方,整體布局看起來(lái)簡(jiǎn)潔干練,頗有商用機(jī)器人的風(fēng)度。
當(dāng)然這只是我們看到的,對(duì)于用戶來(lái)說(shuō),他們更關(guān)心的是這些升級(jí)的亮點(diǎn)對(duì)他們來(lái)說(shuō)有哪些用處。
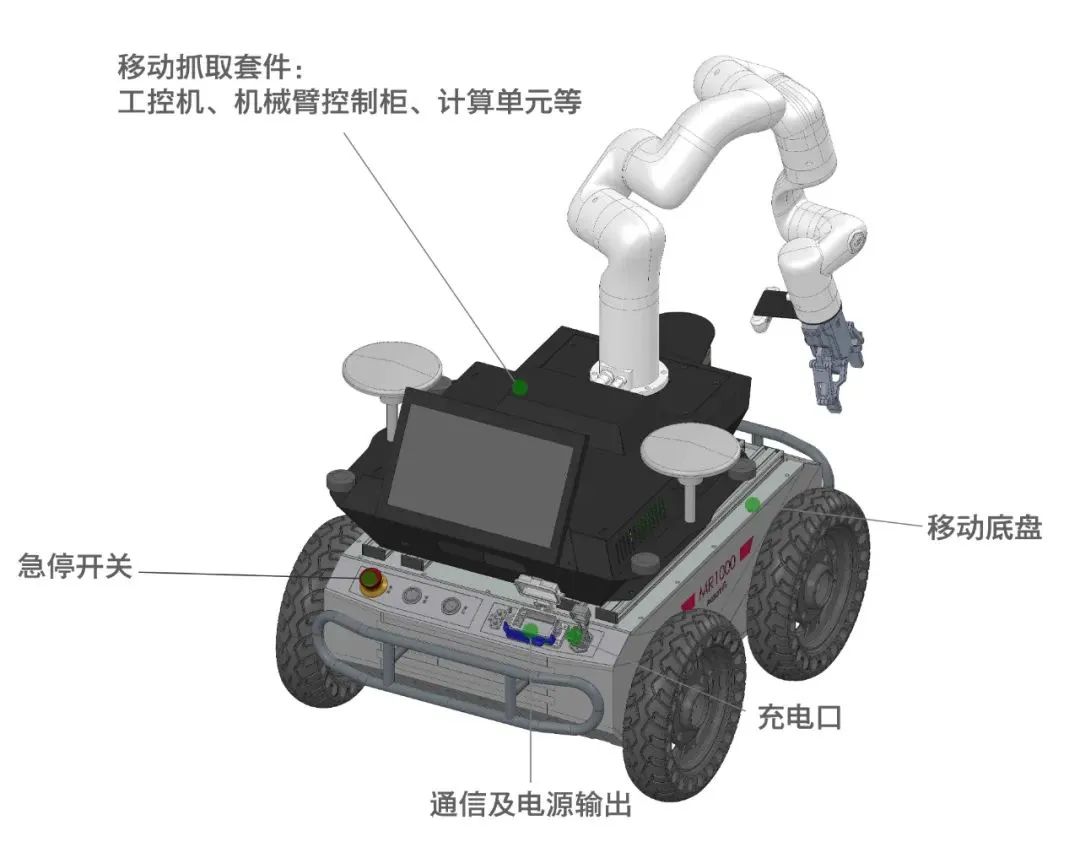
以此次升級(jí)配備的高清顯示屏為例,它的配備是為了響應(yīng)眾多用戶的呼聲,解決沒(méi)有屏幕不方便調(diào)試的問(wèn)題。配備一個(gè)顯示屏并不難,難的是它應(yīng)該以什么姿態(tài)被安裝在什么位置。
通過(guò)圖片可以看到顯示屏以一定的傾斜角度安裝在機(jī)器人系統(tǒng)的后方,這點(diǎn)與傳統(tǒng)顯示屏安裝在產(chǎn)品正前方不同。工程師為何如此設(shè)計(jì)呢?
答案很簡(jiǎn)單:這種安裝方式可以避免因用戶操作失誤而導(dǎo)致底盤(pán)突然加速前進(jìn)時(shí)被傷的危險(xiǎn)。
其次,顯示屏看似“裸奔”在空中,仔細(xì)觀察可以發(fā)現(xiàn)下方的電子防撞系統(tǒng)位置比它更為突出,在機(jī)器人系統(tǒng)運(yùn)營(yíng)中默默地為它保駕護(hù)航。
因此,高清顯示屏幕的配備,不僅解決了用戶調(diào)試不便的問(wèn)題,還通過(guò)測(cè)試安裝角度,提前解決了反光過(guò)強(qiáng)等原因?qū)е掠脩艨床磺宓膯?wèn)題,這在較大程度上提升了采摘機(jī)器人整體的使用便利性;
其次,工程師結(jié)合移動(dòng)底盤(pán)本身的防碰撞系統(tǒng)做了巧妙地處理,既無(wú)需額外單獨(dú)加裝防護(hù)裝置又保護(hù)了看似“裸露”的顯示屏,這可以提高設(shè)備的安全性。
通過(guò)以上分析可以看出此次外觀上的升級(jí)是以滿足客戶需求為出發(fā)點(diǎn),讓新加入的部分能有機(jī)地融入整體系統(tǒng),從而提升整個(gè)機(jī)器人系統(tǒng)的易用性、安全性同時(shí)規(guī)避因產(chǎn)品改動(dòng)而可能引起的其他問(wèn)題,這讓小編忍不住為工程師的細(xì)致和智慧點(diǎn)贊。
除屏幕外,實(shí)際上還有很多可以展開(kāi)觀察的點(diǎn),比如更規(guī)整的線束,更犀利的造型,更合理的配重比……篇幅關(guān)系,這里就不一一展開(kāi)贅述。
內(nèi)練一口氣——功能上升級(jí)優(yōu)化
如果用一句話形容功能上的升級(jí),那便是:融合控制升級(jí),釋放開(kāi)發(fā)潛力!
下面我們通過(guò)來(lái)看這套MR1000-Xarm蘋(píng)果采摘開(kāi)發(fā)蘋(píng)果的實(shí)際演示效果來(lái)說(shuō)明究竟融合控制升級(jí)在哪里,又提升了哪些開(kāi)發(fā)潛力。在開(kāi)始之前,先跟大家復(fù)盤(pán)整個(gè)過(guò)程:
開(kāi)發(fā)人員遙控機(jī)器人通過(guò)3D激光雷達(dá)構(gòu)建環(huán)境地圖,并設(shè)置任務(wù)列表。
機(jī)器人要完成的任務(wù)就是在接到指令后自主導(dǎo)航到蘋(píng)果樹(shù)前,調(diào)整好姿態(tài)后,通過(guò)3D視覺(jué)識(shí)別到蘋(píng)果后,調(diào)用MoveIt! 進(jìn)行規(guī)劃,控制機(jī)械臂抓取蘋(píng)果。完成抓取動(dòng)作后,機(jī)器人會(huì)根據(jù)任務(wù)點(diǎn)再次啟程,自行前往目標(biāo)點(diǎn)位并將蘋(píng)果放置在置物平臺(tái)上。
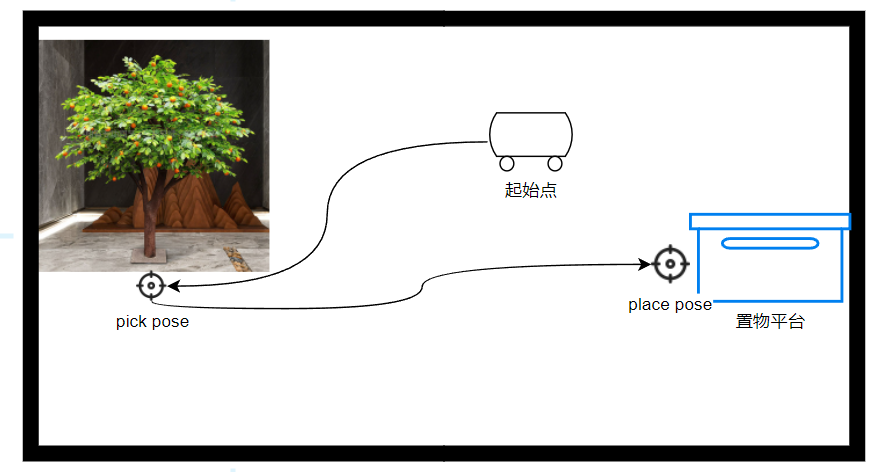
蘋(píng)果采摘簡(jiǎn)易示意圖
在機(jī)器人執(zhí)行任務(wù)的過(guò)程中,唯一需要開(kāi)發(fā)者介入的時(shí)間是給它建立任務(wù)這個(gè)階段,在接到任務(wù)指令后的全部過(guò)程均可實(shí)現(xiàn)全自主作業(yè),直至任務(wù)完成。
因此,自主導(dǎo)航能力顯得尤為重要。MR1000-Xarm搭載的激光SLAM算法經(jīng)過(guò)了工程師深度的優(yōu)化,與上個(gè)版本相比,自主導(dǎo)航過(guò)程更加順滑流暢,對(duì)突發(fā)狀況的感知和避讓繞行也更加迅捷。
當(dāng)機(jī)器人通過(guò)自主導(dǎo)航到達(dá)抓取目標(biāo)點(diǎn)位后,下一個(gè)關(guān)鍵的節(jié)點(diǎn)就是識(shí)別與抓取的過(guò)程。當(dāng)機(jī)械臂接收到系統(tǒng)的抓取指令后會(huì)先運(yùn)動(dòng)到預(yù)定好的檢測(cè)位姿,通過(guò)3D相機(jī)來(lái)檢測(cè)識(shí)別蘋(píng)果。視覺(jué)識(shí)別過(guò)程較上一代相比,在識(shí)別速率、準(zhǔn)確率方面有了大幅提升。是怎么做到的呢?這需要從視覺(jué)識(shí)別算法說(shuō)起。
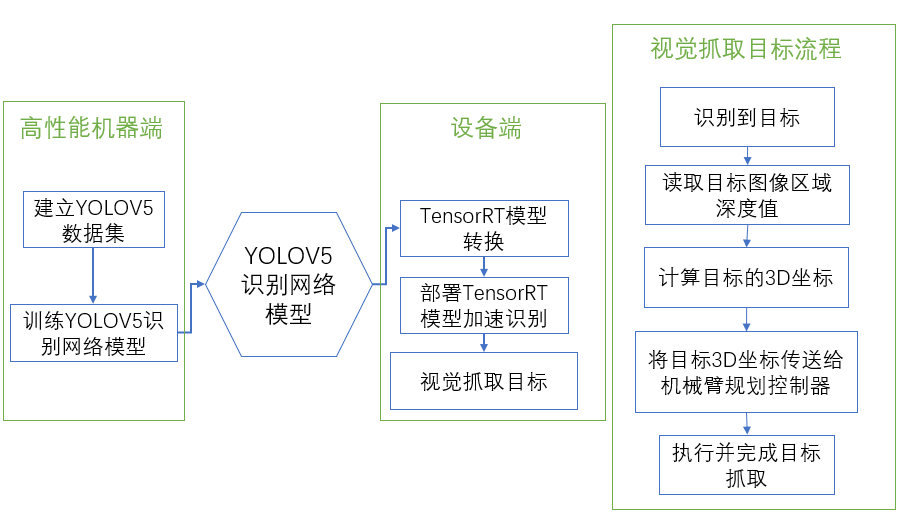
MR1000-Xarm搭載的視覺(jué)采用了YOLOV5作為物體識(shí)別器,且圍繞深度學(xué)習(xí)做了深度的優(yōu)化。
為了能夠使用YOLOV5進(jìn)行特定目標(biāo)的識(shí)別,首先需要在可能的場(chǎng)景下預(yù)先對(duì)大量包含識(shí)別目標(biāo)的數(shù)據(jù)集進(jìn)行標(biāo)注,創(chuàng)建訓(xùn)練集,再使用高性能機(jī)器訓(xùn)練YOLOV5網(wǎng)絡(luò)。得到訓(xùn)練好的模型后,再將訓(xùn)練好的模型轉(zhuǎn)換為TensorRT模型并部署到設(shè)備端,這可以在保留原始YOLOV5網(wǎng)絡(luò)模型的識(shí)別精度的前提下,有效提高目標(biāo)識(shí)別的速率,實(shí)現(xiàn)實(shí)時(shí)目標(biāo)識(shí)別。
當(dāng)然,要能實(shí)現(xiàn)精準(zhǔn)抓取,機(jī)器人系統(tǒng)還需要通過(guò)讀取目標(biāo)區(qū)域的深度值,再結(jié)合相機(jī)的內(nèi)參獲取蘋(píng)果的真實(shí)3D坐標(biāo),最后利用 MoveIt! 及 Open Motion Planning Library 完成機(jī)械臂運(yùn)動(dòng)規(guī)劃,并實(shí)現(xiàn)準(zhǔn)確抓取!
完成抓取后,機(jī)器人會(huì)自主執(zhí)行下一個(gè)任務(wù),先導(dǎo)航到該任務(wù)中指定的導(dǎo)航目標(biāo)點(diǎn),即將到達(dá)目標(biāo)點(diǎn)位時(shí)機(jī)器人會(huì)動(dòng)態(tài)微調(diào)位置(小編直呼細(xì)膩),調(diào)整完成后系統(tǒng)向機(jī)械臂控制模塊發(fā)送 place 指令,控制機(jī)械臂運(yùn)動(dòng)到預(yù)定義好的放置位姿完成放置動(dòng)作。
至此,機(jī)器人完成了第一輪的自主導(dǎo)航、路徑規(guī)劃、視覺(jué)識(shí)別、抓取、再導(dǎo)航以及放置的全過(guò)程。整個(gè)過(guò)程的流暢度和高效率給我很深的印象,經(jīng)過(guò)上述的分析不難發(fā)現(xiàn),流暢和高效其實(shí)源自導(dǎo)航、識(shí)別、抓取等每一個(gè)環(huán)節(jié)的優(yōu)化,以及整個(gè)系統(tǒng)的高效融合協(xié)作,而高效融合協(xié)作的背后是工程師們的付出與智慧。
實(shí)際上這套系統(tǒng)能抓蘋(píng)果,意味著也就能抓取更多的物體,如所有常見(jiàn)的有表面特征的物體:苦瓜、黃瓜、橘子、芒果等蔬菜瓜果,還可用于貨架分揀、快遞包裹搬運(yùn)等場(chǎng)景,可開(kāi)發(fā)的潛力巨大!

全程實(shí)現(xiàn)自主路徑規(guī)劃與智能避障
如此廣泛的應(yīng)用空間,讓人更愿意稱MR1000-Xarm這套系統(tǒng)為智慧移動(dòng)抓取機(jī)器人。作為升級(jí)后的蘋(píng)果采摘開(kāi)發(fā)平臺(tái),它真正做到了內(nèi)外兼修,全方位進(jìn)化!
進(jìn)化后的這套移動(dòng)抓取開(kāi)發(fā)平臺(tái)為智能機(jī)器人科研院所、高校研究團(tuán)隊(duì)提供一個(gè)了更完善、更高效的選擇。
而基于ROS的系統(tǒng)能為更廣大的科研領(lǐng)域的開(kāi)發(fā)者提供更多的便利性和更好的兼容性,能為他們節(jié)約大量的選型和硬件開(kāi)發(fā)時(shí)間,真正意義上體現(xiàn)了史河機(jī)器人助力科研教育,讓創(chuàng)想精彩綻放的理念。
審核編輯 :李倩
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28803瀏覽量
209143 -
工控系統(tǒng)
+關(guān)注
關(guān)注
1文章
100瀏覽量
14701 -
激光雷達(dá)
+關(guān)注
關(guān)注
969文章
4046瀏覽量
190672
原文標(biāo)題:用復(fù)合機(jī)器人去摘蘋(píng)果,需要考慮哪些技術(shù)細(xì)節(jié)?
文章出處:【微信號(hào):indRobot,微信公眾號(hào):工業(yè)機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
簡(jiǎn)單認(rèn)識(shí)第二代高通3D Sonic傳感器
簡(jiǎn)單認(rèn)識(shí)高通第二代驍龍XR2+平臺(tái)
簡(jiǎn)單認(rèn)識(shí)第二代高通Oryon CPU
AMD推出第二代Versal Premium系列
AYANEO Pocket EVO搭載第二代驍龍G3x游戲平臺(tái)
一加正式發(fā)布第二代東方屏,獲全球首個(gè)DisplayMate A++認(rèn)證
第二代AMD Versal Prime系列自適應(yīng)SoC的亮點(diǎn)
新品 | 采用第二代1200V CoolSiC? MOSFET的集成伺服電機(jī)的驅(qū)動(dòng)器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論