 模型連續性:從離線仿真到實時測試
模型連續性:從離線仿真到實時測試

在新電力電子應用的整個開發過程中,仿真在許多方面為開發人員提供幫助。開發過程通常包括功能概念、組件選擇、機械設計、控制器實現以及最終在正常和故障條件下的測試和驗證。
理想情況下,開發過程參考熟悉的 V 模型(圖 1),其中設計和實現遵循自上而下的方法,驗證遵循自下而上的方法。在每個級別,開發的組件在被集成到更大的系統之前,都會使用適當的測試工具和程序進行驗證。
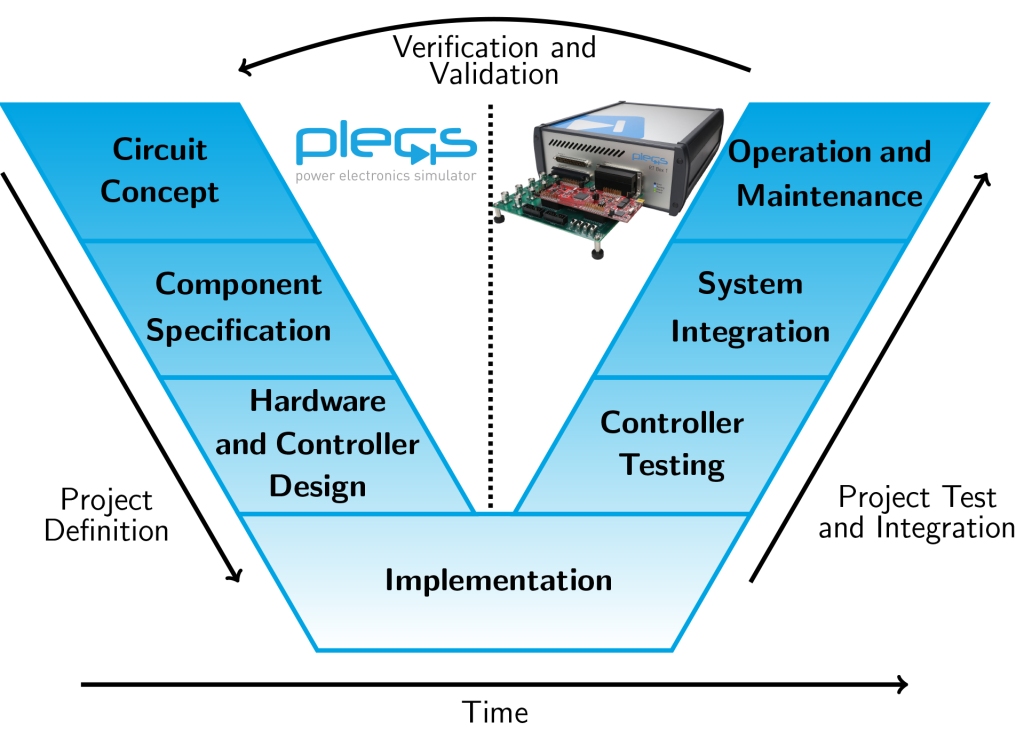
圖 1:電力電子系統開發過程的 V 模型
對于驗證,重要的是使用與設計相同的規范。盡管設計和驗證工具可能使用具有不同細節級別的模型,但確保模型產生可比較的結果很重要。本文解釋了為什么單個模型不足以滿足所有應用程序,以及如何確保多個模型盡管實現和用例不同,但仍能提供一致的結果。
電路概念
在新設計的第一階段,可以使用理想的電路組件和通用控制塊快速評估特定電源電路的可行性和適當的控制方案。在這個概念階段,不需要制造商特定的信息來對電源轉換器的各個組件進行建模。相反,功率半導體(例如 MOSFET 和二極管)由與其功能行為相對應的簡單開/關開關表示。無源元件的寄生特性,如繞組電阻和電感飽和,可以忽略不計,除非它們對電路運行起到功能作用。
同樣,控件由功能框圖或狀態機表示,與它們的最終實現無關。這些控制稍后可以實現為模擬電路、數字邏輯、微控制器代碼或硬件 PWM 發生器。
概念階段使用的仿真軟件必須為電力電子應用中遇到的所有類型的電氣元件提供通用模型。由于功率半導體通常在開關模式下運行,因此應將它們建模為理想的開關,以降低仿真模型的復雜性。用戶必須能夠自由連接任意組件并通過子系統創建自己的定制組件。
在概念階段,系統模型的復雜性和規模會增加。為了獲得沒有明顯積分誤差的快速瞬態仿真,強烈建議使用可變時間步長求解器。可變步長求解器以不超過最大積分誤差的方式自動控制時間步長,并且準確地命中切換瞬間和其他不連續事件。
仿真軟件PLECS從一開始就設計用于電力電子系統的仿真。一個顯著特點是它能夠將功率半導體建模為真正的理想開關,這允許對大型電路進行快速而穩健的仿真,而無需調整求解器設置。
元件選擇
根據電路設計確定的電流和電壓要求,選擇具有特定零件編號的合適組件并創建機械布局。在第二階段,模擬有助于預測熱損失和由此產生的溫度。在一個連續的工作流程中,熱模型為自己展示了一個放置在電路上的新層。熱域計算電路產生的損耗并模擬傳熱。
使用每個半導體的一組損耗表可以有效地模擬開關和傳導損耗。開關損耗表提供了取決于器件的阻斷電壓、導通電流和結溫的耗散能量。計算傳導損耗的表顯示了作為導通電流和器件溫度函數的電壓降。在每個模擬步驟中,計算熱損失并將其輸入到包含半導體器件、散熱器和外部冷卻裝置的熱等效網絡中。
使用損耗表在開關期間模擬電壓和電流瞬變的優勢在于可以保持理想的開關并因此保持高模擬速度。熱域的計算只是為基于理想組件的電氣仿真增加了一些額外的工作。
與 PLECS 一起使用的功率半導體損耗表可以從越來越多的半導體制造商處獲得,例如 ABB、英飛凌和 Wolfspeed。
機械設計
下一階段進行的機械設計包括組件的放置、電氣布局、冷卻系統的設計以及與外殼的集成。
由于 CAD 程序和 PCB 布局軟件需要許多其他參數而不是用于系統仿真的參數,因此模型工具鏈通常會在此時中斷。在機械設計中,開發人員必須遵守系統仿真中使用的參數或在原始數據集中相應地修改它們。
使用來自機械設計的空間布局信息,開發人員可以確定電氣仿真中寄生電感和 EMI 效應的影響。這只有在使用準確再現開關瞬態的詳細半導體模型時才有可能。由于這些模型的計算量非常大,它們只能在幾個開關周期內進行仿真,因此不適用于系統仿真。
由于在使用空間信息和獲得詳細的半導體模型方面付出了巨大的努力,而且新見解的獲得有限,因此經常省略這種低級模擬。
控制器實現
在電力電子應用中,控制的開發通常比功率級的設計需要更多的努力,尤其是在使用微控制器的情況下。因此,控制器的開發應在概念階段完成后立即開始,在實際電源硬件構建之前。
在經典方法中,經驗豐富的軟件開發人員將根據控制工程師的規范為特定目標 MCU 實現控制代碼。但是,實現嵌入式控制代碼需要持續測試。這可以通過將控制代碼的摘錄編譯到以主機計算機而不是目標 MCU 為目標的 DLL 中來簡化。大多數系統仿真軟件都可以包含 DLL,以便可以根據受控系統的模型驗證控制代碼。此外,PLECS 提供了將 C 代碼直接粘貼到 C 腳本塊的編輯器中的可能性。然后,此代碼會與模型一起自動編譯和執行。
為了確保概念階段的實現控制代碼和功能框圖產生相同的結果,可在PLECS中使用可配置子系統,其中一個實現包含框圖,另一個包含代碼。模擬相同功能的多個實現并將結果疊加在 PLECS Scope 中是模型連續性的關鍵測試。
在 MCU 上實現控制的一種更現代的方法是從功能框圖中自動生成特定于目標的 C 代碼。除了離線實現之外,每個塊都必須提供一種輸出具有實時能力的 C 代碼的方法。框圖通常包含通用信號處理塊以及目標 I/O 塊,以配置片上外設,例如 ADC 和 PWM 發生器。特別是對于初學者來說,自動編碼極大地加快了開發速度,因為通過程序代碼配置外圍設備是一項艱巨的任務,需要對 MCU 有深入的了解或深入研究手冊。在模型連續性方面,自動編碼的優點是生成的代碼始終遵循框圖定義。然而,
如果未選擇目標 MCU 或帶有信號調節電子設備的整個控制板尚不可用,則 MCU 可以暫時替換為功能更強大的實時處理平臺,例如 PLECS RT Box。這種方法被稱為快速控制原型 (RCP),有助于快速獲得由功率級和控制器組成的工作設置。
在PLECS 中,通過從特定 MCU 或 RT Box 切換到通用目標,可以在離線仿真中使用生成的代碼代替原始框圖。此功能允許通過覆蓋仿真結果快速驗證生成的代碼。
控制器測試
我們已經看到了如何在離線仿真中通過將框圖替換為編譯后的代碼來根據框圖定義驗證手寫或自動生成的代碼。這種類型的驗證稱為軟件在環 (SIL) 測試,由于不需要刷新 MCU,因此可以縮短周轉時間。但是,無法使用 SIL 驗證 MCU 外設的正確配置,也無法在目標 MCU 上檢測到時序問題、處理器利用率或資源損壞。
不僅要測試控制代碼,還要測試整個控制硬件,包括 MCU 外圍設備,通常都需要將實際功率級連接到控制器。然而,這通常是不切實際的,因為在最終調試之前功率級及其保護可能沒有得到充分開發,某些錯誤的操作條件甚至可能損壞功率級。
為了獨立于功率級測試控制硬件,控制器可以連接到模擬功率級行為的實時模擬器。這種方法被稱為硬件在環 (HIL) 仿真,因為實際控制硬件是閉環仿真的一部分。用實時仿真代替功率級的優點是可以在大量正常和故障條件下廣泛測試控制器的行為。
控制器 HIL 測試變得非常流行,因為信號級的連接在控制器和功率級之間提供了一個明確定義的接口,并且只需要很少的修改就可以用實時模擬器替換功率級。
電力電子設備 HIL 仿真面臨的挑戰是電路中普遍存在的小時間常數。只有較短的額外延遲是可以接受的,這是實時模擬器不可避免地引入的。捕獲 PWM 信號和向控制器提供模擬傳感器信號之間的計算延遲應保持在最低限度,因為控制器仍應像連接到實際功率級一樣工作。這不僅需要專用的實時硬件(例如 PLECS RT Box),還需要針對固定時間步長模擬中的快速準確執行進行優化的轉換器模型。
實時模擬總是與前進的時間賽跑,因為每個時間步長的計算必須在離散化周期內完成。在現代實時平臺上,可實現的最小時間步長約為幾微秒,可能取決于模型大小。即使使用完全在 FPGA 上計算的專用轉換器模型,時間步長也很難減少到 0.5 μs 以下。
當今電源轉換器的開關頻率大多在 10 到 100 kHz 之間。如果每個仿真步驟僅對 PWM 信號采樣一次,則捕獲的占空比的分辨率將是不夠的。為了更準確地捕獲占空比,通常以大約 10 ns 的小得多的間隔對 PWM 信號進行采樣,并在一個模擬步驟上取平均值。平均值表示該步驟期間 PWM 信號的相對導通時間。
只有將平均 PWM 信號應用于適當的轉換器模型,才能準確地表示半導體柵極信號。這些模型基于可控電壓和電流源,而不是理想的開/關開關(圖 2)。使用附加邏輯來模擬不連續導通模式和半導體消隱時間。由于仿真時間步長以及平均間隔通常遠小于一個 PWM 開關周期,因此在 PLECS 中,這種建模方法被稱為子周期平均。這種轉換器模型有時也稱為帶時間戳的橋。
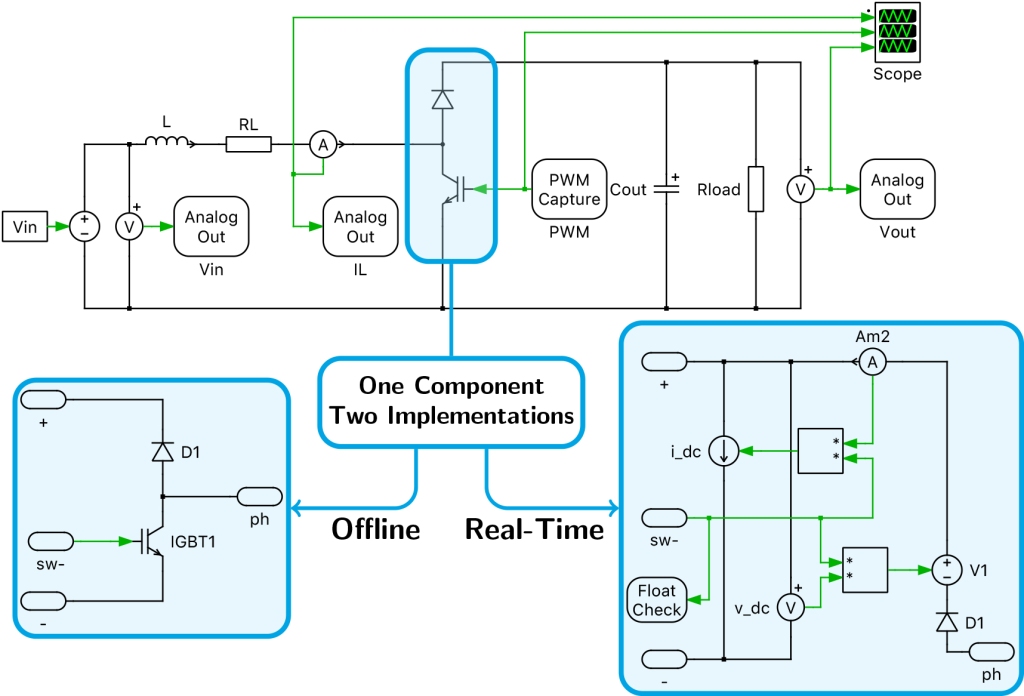
圖 2:具有兩種不同實現方式的 IGBT 斬波器模型,用于離線和實時仿真
雖然子周期平均模型被推薦用于高保真實時應用,但基于理想開關的轉換器模型在離線仿真中仍然是首選。由于子周期平均做出了某些假設和簡化,因此模擬結果可能并不總是完全匹配。此外,當使用生成的 C 代碼進行固定時間步長模擬時,結果可能與連續時間模型略有不同。
在 HIL 測試期間驗證控制器時,使用在設計階段開發的相同電路模型很重要。然而,通用的離線模型通常不同于計算效率高的實時實現。為了解決這個困境,PLECS庫中各種類型的轉換器和逆變橋的電源模塊都配備了兩種實現方式。一種基于理想開關,另一種使用子周期平均。用戶可以輕松地在它們之間切換。為了確保即使在離散化時兩個實現的行為也相同,用戶應該將生成的實時代碼的結果與離線仿真中的連續模型的結果進行比較,如圖 3 所示。這可以在上傳代碼之前完成到 RT 盒上。
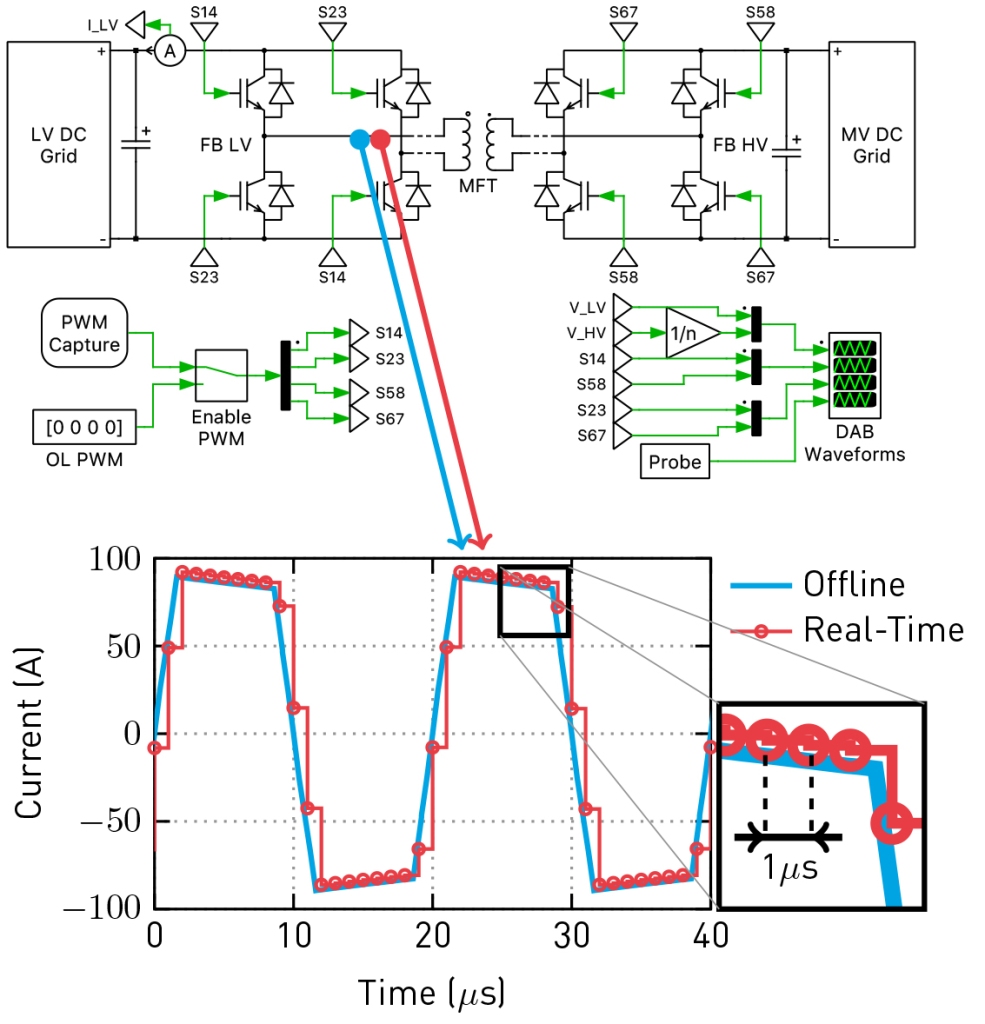
圖 3:通過離線模擬驗證實時結果
PLECS RT 盒
HIL 測試的實時平臺傳統上分為基于多用途 CPU 的通用系統和用于在 FPGA 上進行并行計算的高度專業化系統。傳統的 CPU 通過 PCI Express 連接外圍設備,例如數字和模擬 I/O,PCI Express 是一種通信延遲至少為 10 μs 的串行總線協議。盡管它們的處理能力很高,但模擬時間步長因此被限制在大約。20 μs — 對于大多數電力電子應用來說太多了。另一方面,基于 FPGA 的系統允許 1 μs 或更短的仿真時間步長,并且可以直接訪問外設。雖然 FPGA 是大規模并行計算的理想選擇,但在執行順序代碼時表現不佳,限制了可能的應用。
為了解決傳統 CPU 和 FPGA 的缺點,RT Box 使用賽靈思的 Zynq 片上系統 (SoC),在 FPGA 上集成了多個 ARM CPU 內核。CPU 內核與 FPGA 的緊密集成可實現 100 ns 的 I/O 延遲。CPU 內核可以計算任何仿真模型,而 FPGA 用作流任務的協處理器。由于電力電子電路的典型仿真步長在 1 到 10 μs 之間,RT Box 彌補了傳統 HIL 仿真器留下的性能差距。
RT Box 的真正優勢在于它與PLECS 仿真軟件的端到端互操作性。只需按一下按鈕,PLECS 模型就會轉換為實時 C 代碼,編譯、上傳并在 RT Box 上啟動。使用外部模式,來自 RT Box 的實時仿真數據可以顯示在 PLECS Scopes 中,并與離線仿真的結果進行比較。
Plexim 目前正在擴展其RT Box產品組合。更新后的 RT Box 1 仍然是最具成本效益的電力電子 HIL 平臺,現在具有兩個 CAN 收發器。新的 RT Box 變體 2 和 3 正在部署 Xilinx 的下一代多處理 SoC。除了用于工業通信的額外連接外,RT Box 2 和 3 還具有磁旋轉變壓器接口。與 RT Box 2 相比,RT Box 3 的模擬和數字 I/O 數量是其兩倍。表 1 概述了新 RT Box 變體之間的主要區別。通過新硬件產品,Plexim 將擴大其作為 HIL 系統供應商的地位,并為其客戶提供支持仿真模型連續性的更全面的解決方案。
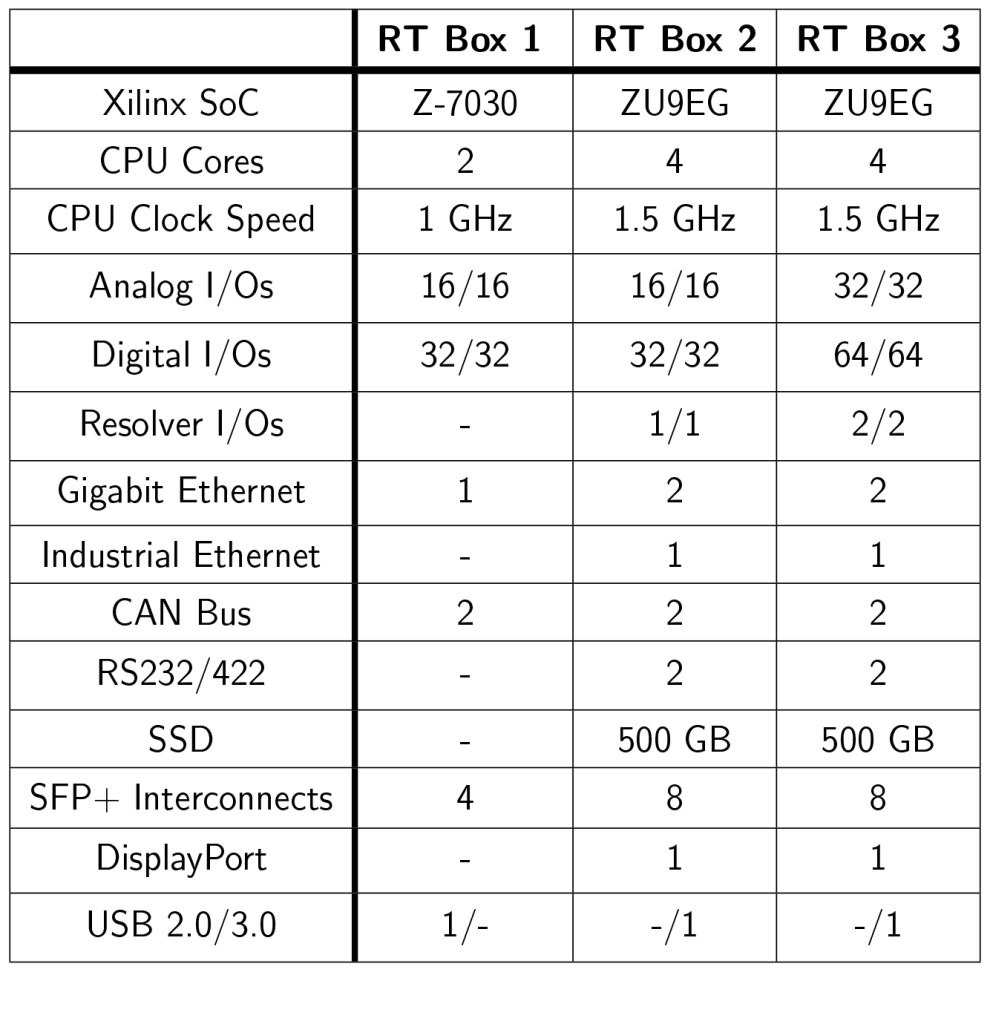
表 1:新 RT Box 變體之間的比較
結論
在從設計到驗證的整個開發過程中對所有仿真使用相同的模型是一個在實踐中難以實現的理想目標。系統或設備行為等不同方面可能需要各種仿真工具和模型,其詳細程度各不相同。因此,獲得一個類似于整個系統的單一“數字孿生”并使用這個孿生作為唯一的真實來源是虛幻的。
盡管如此,建立一個所有系統參數都存儲在一個中央位置并被所有模型引用的開發過程是完全現實的。這個中心位置可以是一個綜合數據庫或只是一個簡單的初始化腳本。某些參數將僅被某些模型用于模擬選定方面。使用像 PLECS 這樣的集成工具鏈有助于相互驗證不同目的的模型,從而實現模型的連續性。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7953瀏覽量
155136 -
電源
+關注
關注
185文章
18372瀏覽量
256362 -
仿真
+關注
關注
52文章
4289瀏覽量
135884
發布評論請先 登錄
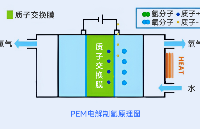
綠氫系統 PEM 電解槽直流接入仿真驗證深度解析
利用EasyGo DeskSim創建實時仿真項目教程
綠氫系統篇丨PEM電解槽模型交流接入模式仿真驗證
新品 | 服務:InfineonSpice 離線仿真工具

光伏發電系統篇:單級式并網系統實時仿真
光伏發電系統篇:三電平并網逆變器實時仿真
智能駕駛HIL仿真測試解決方案

EasyGo 實時仿真丨DC-AC-MMC 實時仿真應用
基于EasyGo DeskSim進行的AC-DC-MMC五電平的實時仿真

AC-AC-MMC實時仿真應用指南






 工商網監
工商網監
評論