") 如何使用Arduino制作數(shù)字出租車計費(fèi)器
如何使用Arduino制作數(shù)字出租車計費(fèi)器

今天,無論是電表還是出租車計費(fèi)表,數(shù)字儀表都在取代各個領(lǐng)域的模擬儀表。主要原因是模擬儀表的機(jī)械部件在長時間使用時容易磨損,并且不如數(shù)字儀表準(zhǔn)確。
一個很好的例子是模擬車速表和里程表,用于舊摩托車測量速度和行駛距離。它們具有稱為小齒輪和齒條裝置的特殊部件,其中當(dāng)車輪旋轉(zhuǎn)時,電纜用于旋轉(zhuǎn)速度計的銷釘。長時間使用會磨損,也需要更換和維護(hù)。
在數(shù)字儀表中,不是使用機(jī)械部件,而是使用一些傳感器,如光斷續(xù)器或霍爾傳感器來計算速度和距離。這比模擬儀表更準(zhǔn)確,并且不需要長時間維護(hù)。
今天,在本教程中,我們將使用 Arduino 制作數(shù)字出租車計費(fèi)器的原型。該項目計算出租車車輪行駛的速度和距離,并在16x2 LCD 顯示屏上連續(xù)顯示。當(dāng)我們按下按鈕時,它會根據(jù)行駛的距離生成票價金額。
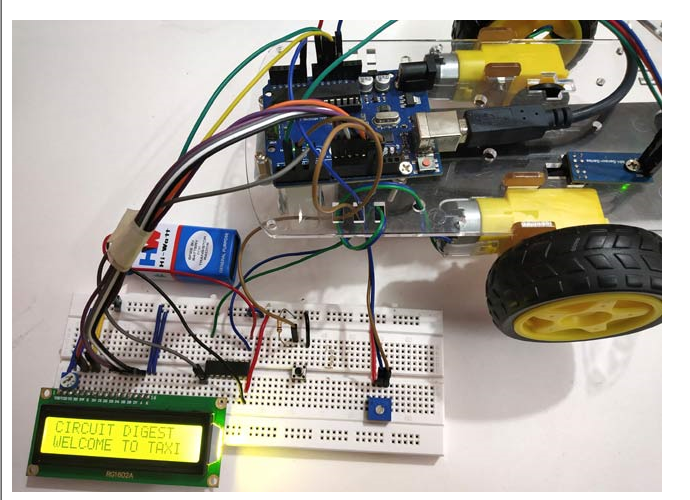
下圖顯示了數(shù)字出租車計程表項目的完整設(shè)置
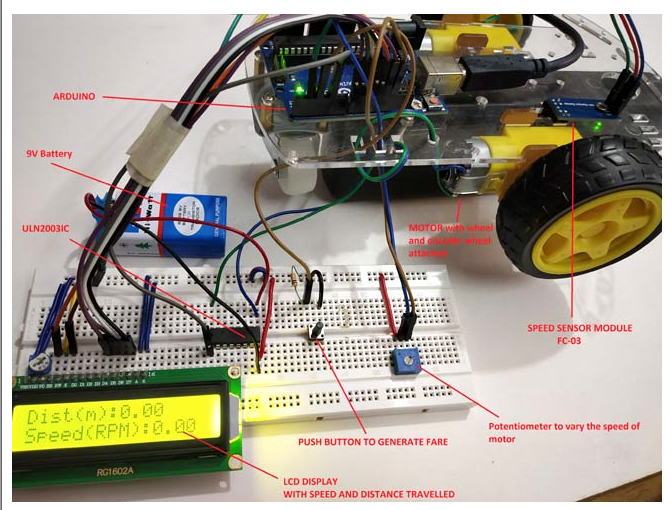
這個原型有一個 RC 汽車底盤,帶有一個速度傳感器模塊和一個連接到電機(jī)的編碼器輪。一旦測量了速度,我們可以通過按下按鈕測量行駛的距離并找到票價金額。我們可以使用電位器設(shè)置車輪的速度。要了解有關(guān)在 Arduino 中使用 LM-393 速度傳感器模塊的更多信息,請點(diǎn)擊鏈接。讓我們看一下速度傳感器模塊的簡短介紹。
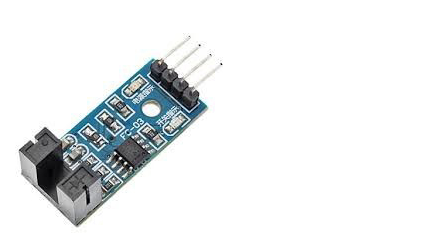
這是一種槽型模塊,可用于測量編碼器輪的旋轉(zhuǎn)速度。該速度傳感器模塊基于插槽式光斷續(xù)器工作,也稱為光源傳感器。該模塊需要 3.3V 至 5V 的電壓并產(chǎn)生數(shù)字輸出。因此它可以與任何微控制器接口。
紅外光 傳感器 由光源(IR-LED)和光電晶體管傳感器組成。兩者之間都有一個小間隙。當(dāng)物體放置在 IR LED 和光電晶體管的間隙之間時,它將中斷光束,導(dǎo)致光電晶體管停止通過電流。

因此,對于這個傳感器,使用可以連接到電機(jī)的開槽盤(編碼器輪),當(dāng)輪隨電機(jī)旋轉(zhuǎn)時,它會中斷 IR LED 和光電晶體管之間的光束,從而使輸出打開和關(guān)閉(產(chǎn)生脈沖)。
因此,當(dāng)源和傳感器之間存在中斷時(當(dāng)任何物體放置在兩者之間時)它會產(chǎn)生高電平輸出,而當(dāng)沒有放置物體時會產(chǎn)生低電平輸出。在模塊中,我們有一個 LED 來指示引起的光中斷。
該模塊帶有LM393 比較器 IC,用于在輸出端產(chǎn)生準(zhǔn)確的 HIGH 和 LOW 信號。因此這個模塊有時被稱為LM393 速度傳感器。
測量行駛速度和距離以計算票價
要測量旋轉(zhuǎn)速度,我們需要知道編碼器輪中存在的槽數(shù)。我有一個編碼輪,里面有 20 個插槽。當(dāng)它們旋轉(zhuǎn)一整圈時,我們在輸出端有 20 個脈沖。因此,要計算速度,我們需要每秒產(chǎn)生的脈沖數(shù)。
例如
如果一秒內(nèi)有 40 個脈沖,那么
速度 = Noo。脈沖數(shù)/槽數(shù) = 40/20 = 2RPS(每秒轉(zhuǎn)數(shù))
為了以 RPM(每分鐘轉(zhuǎn)數(shù))計算速度,請乘以 60。
以 RPM 為單位的速度 = 2 X 60 = 120 RPM(每分鐘轉(zhuǎn)數(shù))
測量距離
測量車輪行駛的距離非常簡單。在計算距離之前,應(yīng)該知道車輪的周長。
車輪周長 = π* d
其中 d 是車輪的直徑。
π 的值為 3.14。
我有一個直徑為 6.60 厘米的輪子(RC 車輪),所以周長是(20.7 厘米)。
因此,要計算行進(jìn)的距離,只需將檢測到的脈沖數(shù)乘以周長即可。
行駛距離 = 車輪周長 x(脈沖數(shù) / 槽數(shù))
因此,當(dāng)一個周長為 20.7 厘米的輪子需要 20 個脈沖,即編碼器輪轉(zhuǎn)一圈時,輪子行進(jìn)的距離由下式計算
行駛距離 = 20.7 x (20/20) = 20.7cm
為了計算以米為單位的距離,將以厘米為單位的距離除以 100。
注意:這是一個小型 RC 汽車車輪,實(shí)時汽車的車輪比這個大。所以我假設(shè)本教程中車輪的周長為 230 厘米。
根據(jù)行駛距離計算票價
要獲得總票價金額,請將行駛距離乘以票價(金額/米)。
注意:在本教程中,我假設(shè)每米收費(fèi) 5 盧比。
因此,如果車輪行駛 20m,則票價將為 20*5=100 盧比。
所以現(xiàn)在讓我們獲取組件并構(gòu)建電路。
所需組件
Arduino UNO
液晶顯示器 (16x2)
按鈕
電位器 -10k
ULN2003電機(jī)驅(qū)動IC
LM393 速度傳感器模塊 (FC-03)
帶速度編碼器的 RC 智能汽車底盤
電池 9V
面包板
連接電線
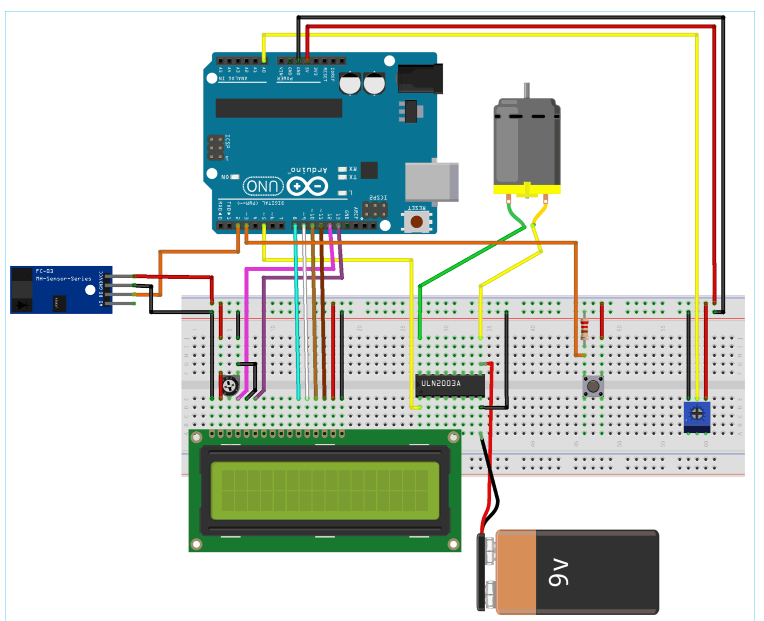
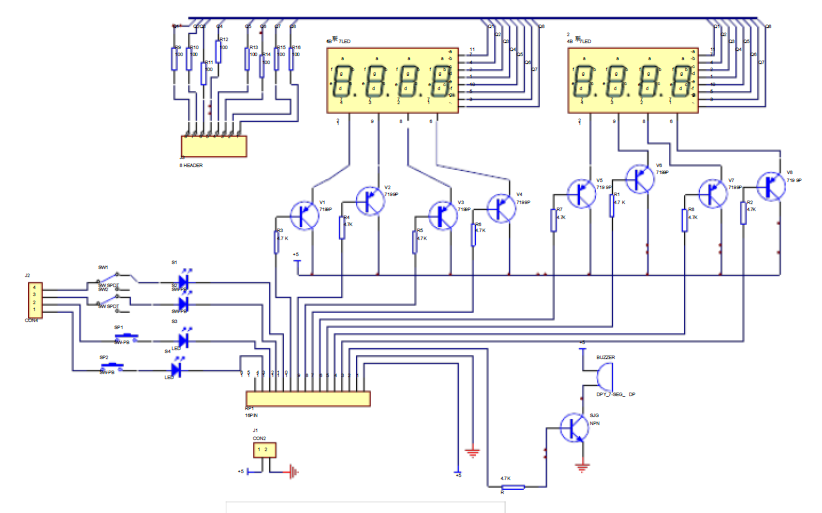
電路原理圖
使用 Arduino 的數(shù)字出租車計費(fèi)器項目的電路圖 如下所示:
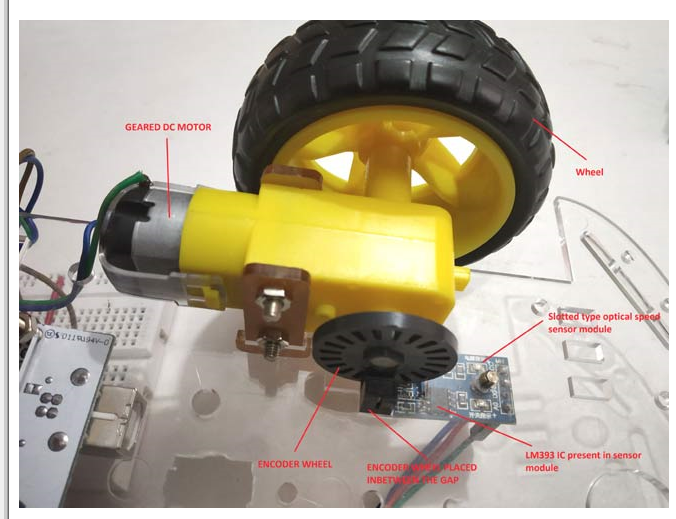
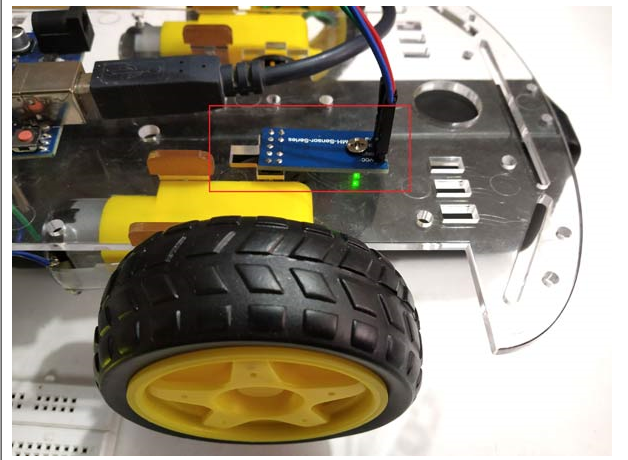
用遙控車底盤安裝速度傳感器
速度傳感器安裝在傳感器間隙之間的編碼器輪。在我的機(jī)箱中,我有一個用于放置傳感器的特殊孔。見下圖
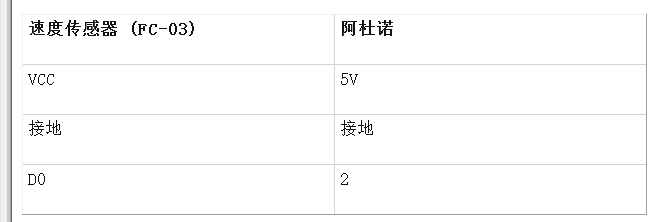
速度傳感器模塊和 Arduino 之間的連接
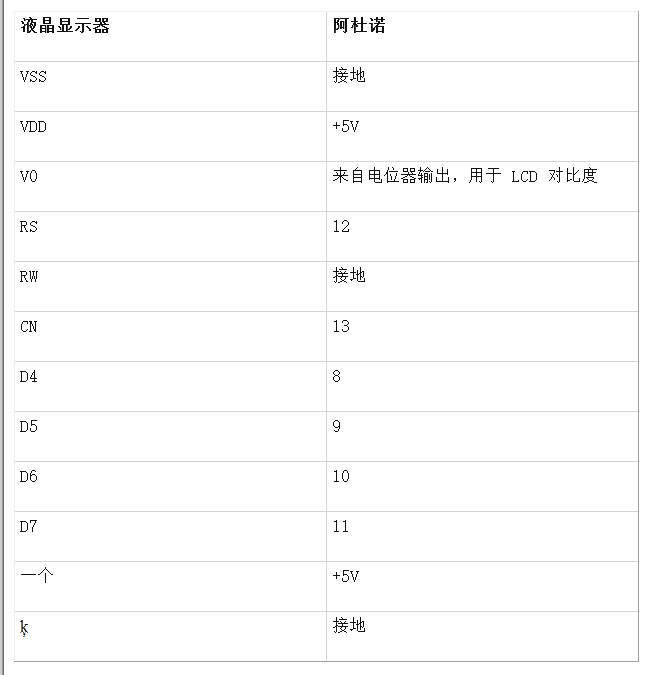
Arduino 和 16x2 LCD 之間的連接
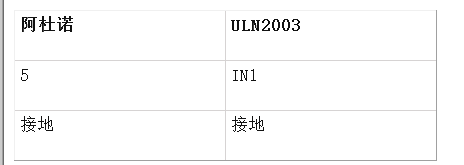
Arduino 與 ULN2003 之間的連接
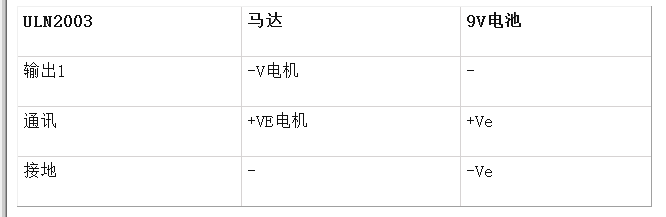
ULN2003、直流電機(jī)和9v電池之間的連接
我使用了 9V 電池和 ULN2003 IC 為電機(jī)外部供電。
按鈕和電位器連接
帶有下拉電阻的按鈕連接到 Arduino 的引腳 3,用于在按下時生成票價金額。
電位器用于向 Arduino 的引腳 A0 提供模擬輸入電壓,以改變電機(jī)輪的速度。
為數(shù)字出租車計價器編程 Arduino
本教程末尾提供了帶有演示視頻的完整代碼。在這里,我們了解了代碼的幾個重要部分。
在進(jìn)入代碼之前,我們需要了解代碼中使用的中斷和定時器 One 庫。
此處使用中斷是因為我們需要不斷檢查在速度傳感器模塊處檢測到的輸出作為高優(yōu)先級。所以代碼中使用了ISR。ISR 是中斷服務(wù)程序,當(dāng)中斷引腳 2 和 3 發(fā)生中斷時調(diào)用。
Arduino UNO 有兩個中斷引腳 2 和 3。
在引腳 2 處,連接速度傳感器 D0 的輸出。
在引腳 3 處,連接了一個帶有下拉電阻的按鈕。
此代碼中使用TimerOne 庫來檢查一秒鐘內(nèi)檢測到多少次旋轉(zhuǎn)(多少個脈沖),據(jù)此我們可以計算每秒的速度并將其顯示在輸出中。此 ISR 函數(shù)每秒執(zhí)行一次
那么讓我們詳細(xì)看看我們的代碼:
1. 首先,包含程序中要使用的函數(shù)的庫。
#include "TimerOne.h" #include
2. 接下來聲明全局變量,因為它們將在整個程序中使用。
揮發(fā)性無符號整數(shù)計數(shù)器=0; 揮發(fā)性無符號整數(shù)旋轉(zhuǎn)=0; 浮動旋轉(zhuǎn)inm = 0; 無符號整數(shù)速度=0;
3. 接下來定義并初始化連接到 Arduino 的 LCD 引腳。
const int rs = 12, en = 13, d4 = 8, d5 = 9, d6 = 10, d7 = 11; LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
4. 接下來在void setup()
定義引腳模式,此處引腳 A0 用于從電位器獲取模擬輸入,引腳 5 用于寫入連接到 ULN2003 IC 的 IN1 引腳的模擬輸出。
pinMode(A0,輸入); pinMode(5,輸出);
接下來顯示一些歡迎信息并清除它們。
lcd.開始(16,2);//設(shè)置 LCD 為 16x2 類型
lcd.setCursor(0,0);
lcd.print("電路文摘");
lcd.setCursor(0,1);
lcd.print("歡迎來到出租車");
延遲(3000);
lcd.clear();
lcd.print("開始吧:)");
延遲(1000);
lcd.clear();
下一個重要部分是設(shè)置中斷引腳和中斷發(fā)生時要調(diào)用的 ISR
首先,我們需要將 timer1 設(shè)置為 1 秒,然后為 timer1 附加一個 ISR,以便每秒調(diào)用一次此 ISR。ISR 名稱是timerIsr
Timer1.initialize(1000000); Timer1.attachInterrupt(timerIsr);
接下來附加兩個外部中斷。第一個中斷使 Arduino 引腳 2 作為中斷引腳,并在引腳 2 檢測到 RISING(LOW TO HIGH)時調(diào)用 ISR(計數(shù))。此引腳 2 連接到速度傳感器模塊的 D0 輸出。
第二個使 Arduino 引腳 3 作為中斷引腳,并在引腳 3 檢測到高電平時調(diào)用 ISR(generatefare)。該引腳通過下拉電阻連接到按鈕。
attachInterrupt(digitalPinToInterrupt(2),計數(shù),上升); attachInterrupt(digitalPinToInterrupt(3), generatefare , HIGH);
5.接下來看看我們這里使用的ISR:
ISR1-count()當(dāng)引腳 2(連接到速度傳感器)發(fā)生上升(從低到高)時調(diào)用 ISR。
void count() // 速度傳感器計數(shù)的 ISR
{
counter++; // 將計數(shù)器值增加
一圈++;//將旋轉(zhuǎn)值增加一個
delay(10);
}
ISR2- timerIsr()每隔一秒調(diào)用一次 ISR 并執(zhí)行 ISR 中存在的那些行。
無效 timerIsr()
{
detachInterrupt(digitalPinToInterrupt(2));
Timer1.detachInterrupt();
lcd.clear();
浮動速度=(計數(shù)器/20.0)* 60.0;
浮動旋轉(zhuǎn)= 230 *(旋轉(zhuǎn)/ 20);
rotationinm = 轉(zhuǎn)數(shù)/100;
lcd.setCursor(0,0);
lcd.print("距離(m):");
lcd.print(旋轉(zhuǎn));
lcd.setCursor(0,1);
lcd.print("速度(RPM):");
lcd.print(速度);
計數(shù)器=0;
int 類比 = 類比讀取(A0);
int motorspeed = map(analogip,0,1023,0,255);
模擬寫入(5,電機(jī)速度);
Timer1.attachInterrupt(timerIsr);
attachInterrupt(digitalPinToInterrupt(2),計數(shù),上升);
}
這個函數(shù)包含實(shí)際上首先分離 Timer1 和 Interrupt pin2 的行,因為我們在 ISR 中有 LCD 打印語句。
為了以 RPM 計算SPEED,我們使用以下代碼,其中 20.0 是編碼器輪中預(yù)設(shè)的插槽數(shù)。
浮動速度=(計數(shù)器/20.0)* 60.0;
并使用以下代碼計算距離:
浮動旋轉(zhuǎn)= 230 *(旋轉(zhuǎn)/ 20);
這里假設(shè)車輪周長為 230 厘米(因為這對于實(shí)時汽車來說是正常的)
接下來通過將距離除以 100 來轉(zhuǎn)換以 m 為單位的距離
rotationinm = 轉(zhuǎn)數(shù)/100;
之后我們在液晶顯示屏上顯示速度和距離
lcd.setCursor(0,0);
lcd.print("距離(m):");
lcd.print(旋轉(zhuǎn));
lcd.setCursor(0,1);
lcd.print("速度(RPM):");
lcd.print(速度);
重要提示:我們必須將計數(shù)器重置為 0,因為我們需要獲取每秒檢測到的加號數(shù),因此我們使用此行
計數(shù)器=0;
接下來讀取模擬引腳 A0 并將其轉(zhuǎn)換為數(shù)字值(0 到 1023)并進(jìn)一步將這些值映射到 0-255 用于 PWM 輸出(電機(jī)的設(shè)置速度),最后使用連接到 ULN2003 的模擬寫入函數(shù)寫入這些 PWM 值電機(jī)集成電路。
int 類比 = 類比讀取(A0); int motorspeed = map(analogip,0,1023,0,255); 模擬寫入(5,電機(jī)速度);
ISR3:generatefare()ISR 用于根據(jù)行駛距離生成票價金額。當(dāng)檢測到中斷引腳 3 為高電平(按下按鈕時)時調(diào)用此 ISR。該函數(shù)分離引腳 2 的中斷和定時器中斷,然后清除 LCD。
無效generatefare ()
{
detachInterrupt(digitalPinToInterrupt(2)); 引腳 2
Timer1.detachInterrupt();
lcd.clear();
lcd.setCursor(0,0);
lcd.print("票價盧比:");
浮動盧比=rotationinm * 5;
lcd.print(盧比);
lcd.setCursor(0,1);
lcd.print("每米 5 盧比");
}
之后,行駛距離乘以 5(我使用 5 表示 5 盧比/米的費(fèi)率)。您可以根據(jù)自己的意愿進(jìn)行更改。
浮動盧比=rotationinm * 5;
計算金額值后,將其顯示在連接到 Arduino 的 LCD 顯示器上。
lcd.setCursor(0,0);
lcd.print("票價盧比:");
lcd.print(盧比);
lcd.setCursor(0,1);
lcd.print("每米 5 盧比");
完整代碼
#include "TimerOne.h" //包含使用Timer1函數(shù)的Timer1庫
#include
const int rs = 12, en = 13, d4 = 8, d5 = 9, d6 = 10, d7 = 11; //定義 LCD 引腳
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
揮發(fā)性無符號整數(shù)計數(shù)器=0;
揮發(fā)性無符號整數(shù)旋轉(zhuǎn)=0;
浮動旋轉(zhuǎn)inm = 0;
無符號整數(shù)速度=0;
void count() // 速度傳感器計數(shù)的 ISR
{
counter++; //將計數(shù)器值增加
一圈++;//將旋轉(zhuǎn)值增加一個
delay(10);
}
無效 timerIsr()
{
detachInterrupt(digitalPinToInterrupt(2)); //停止中斷引腳2
Timer1.detachInterrupt(); //停止timer1中斷
lcd.clear();
浮動速度=(計數(shù)器/20.0)* 60.0;//以分鐘為單位計算速度(20-編碼器輪中的槽數(shù))
浮點(diǎn)旋轉(zhuǎn) = 230*(旋轉(zhuǎn) / 20);//以厘米為單位計算距離(230-車輪周長假設(shè)為 20-槽數(shù))
rotationinm = rotations/100;
lcd.setCursor(0,0);
lcd.print("距離(m):");
lcd.print(旋轉(zhuǎn));//在LCD顯示rotationinm
lcd.setCursor(0,1);
lcd.print("速度(RPM):");
lcd.print(速度);//在 RPM
計數(shù)器中顯示速度=0;//重置計數(shù)器為0
int 類比 = 類比讀取(A0);// 從引腳 A0 讀取模擬
量 int motorspeed = map(analogip,0,1023,0,255); //將數(shù)字值 0-1023 轉(zhuǎn)換為 0-255 模擬寫入
(5,電機(jī)速度);//設(shè)置引腳 5 的 PWM 值
Timer1.attachInterrupt( timerIsr ); //再次啟動timer1
attachInterrupt(digitalPinToInterrupt(2), count, RISING); //再次在pin2處附加中斷
}
void generatefare() //ISR 生成票價
{
detachInterrupt(digitalPinToInterrupt(2)); //在 2 處禁用中斷引腳
Timer1.detachInterrupt(); //禁用Timer1中斷
float rupees = rotationinm*5; //行駛距離乘以 5(每米 5 盧比)
lcd.clear(); //清除 LCD
lcd.setCursor(0,0);
lcd.print("票價盧比:");
lcd.print(盧比);//顯示票價金額
lcd.setCursor(0,1);
lcd.print("每米 5 盧比");
}
無效設(shè)置()
{
pinMode(A0,INPUT);//將引腳A0設(shè)置為INPUT
pinMode(5,OUTPUT); //將引腳 5 設(shè)置為 OUTPUT
lcd.begin(16,2); //設(shè)置 LCD 為 16x2 類型
lcd.setCursor(0,0); //以下代碼顯示歡迎信息
lcd.print("CIRCUIT DIGEST");
lcd.setCursor(0,1);
lcd.print("歡迎來到出租車");
延遲(3000);
lcd.clear();
lcd.print("開始吧:)");
延遲(1000);
lcd.clear();
Timer1.initialize(1000000); //初始化 timer1 1 秒
Timer1.attachInterrupt( timerIsr ); //每隔一秒調(diào)用一次 ISR 例程
attachInterrupt(digitalPinToInterrupt(2), count, RISING); // 引腳 2 作為中斷引腳,計數(shù) ISR 在發(fā)生從低到右時被調(diào)用。
attachInterrupt(digitalPinToInterrupt(3), generatefare, HIGH); //當(dāng)檢測到高電平時,引腳 3 作為帶有 generatefare ISR 的中斷引腳被調(diào)用。
}
無效循環(huán)()
{
}
-
顯示屏
+關(guān)注
關(guān)注
28文章
4600瀏覽量
76291 -
計費(fèi)器
+關(guān)注
關(guān)注
0文章
7瀏覽量
7447 -
Arduino
+關(guān)注
關(guān)注
189文章
6497瀏覽量
191780
發(fā)布評論請先 登錄
求一個數(shù)電的出租車計費(fèi)器的multisim源文件
請教大神如何去設(shè)計出租車計費(fèi)器系統(tǒng)?
多功能出租車計費(fèi)器的相關(guān)資料推薦
單片機(jī)出租車計費(fèi)器實(shí)驗步驟
基于CPLD/FPGA的出租車計費(fèi)器
如何使用CPLD實(shí)現(xiàn)出租車計費(fèi)器的設(shè)計
出租車計費(fèi)器的PCB原理圖免費(fèi)下載

EDA程序設(shè)計之出租車計費(fèi)器
EDA程序設(shè)計—出租車計費(fèi)器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論