 STM32CUBEIDE(9)----雙ADC輪詢模式掃描多個通道
STM32CUBEIDE(9)----雙ADC輪詢模式掃描多個通道
概述
本章STM32CUBEMX配置STM32F103雙ADC輪詢模式掃描多個通道,通過串口進行打印。
生成例程
使用STM32CUBEMX生成例程,這里使用NUCLEO-F103RB開發板
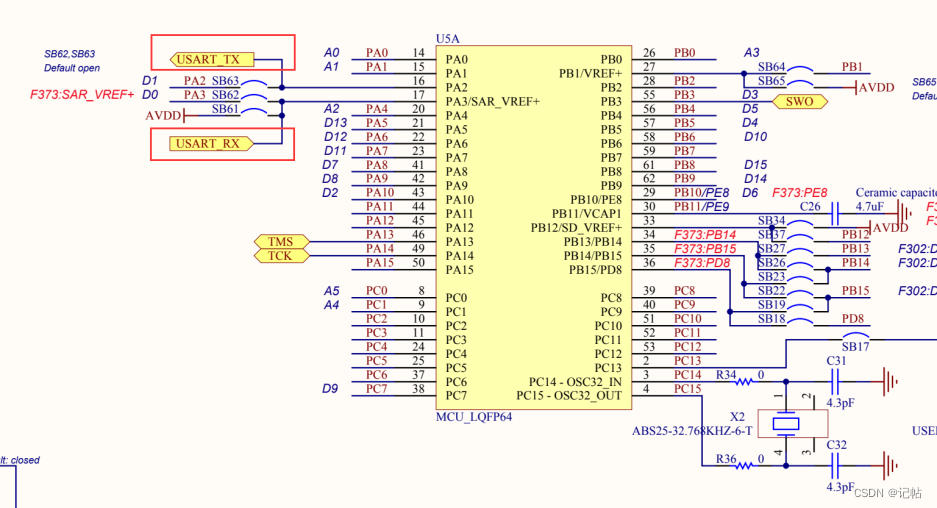
查看原理圖,PA2和PA3設置為開發板的串口。
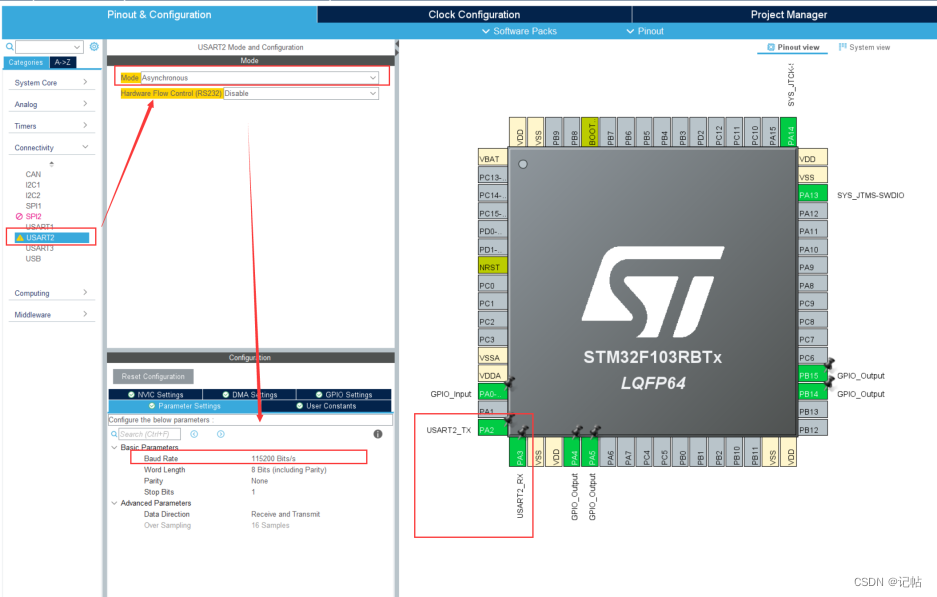
配置串口。
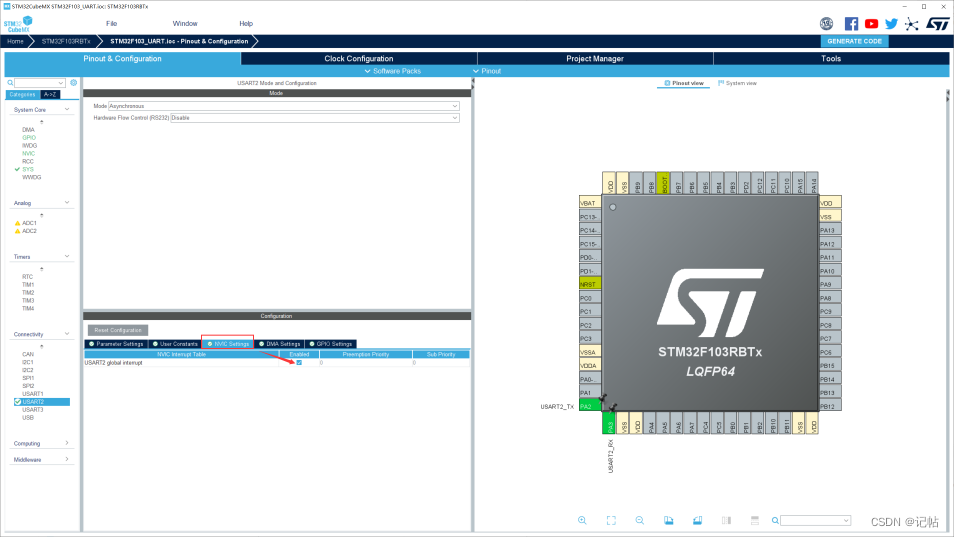
開啟中斷。
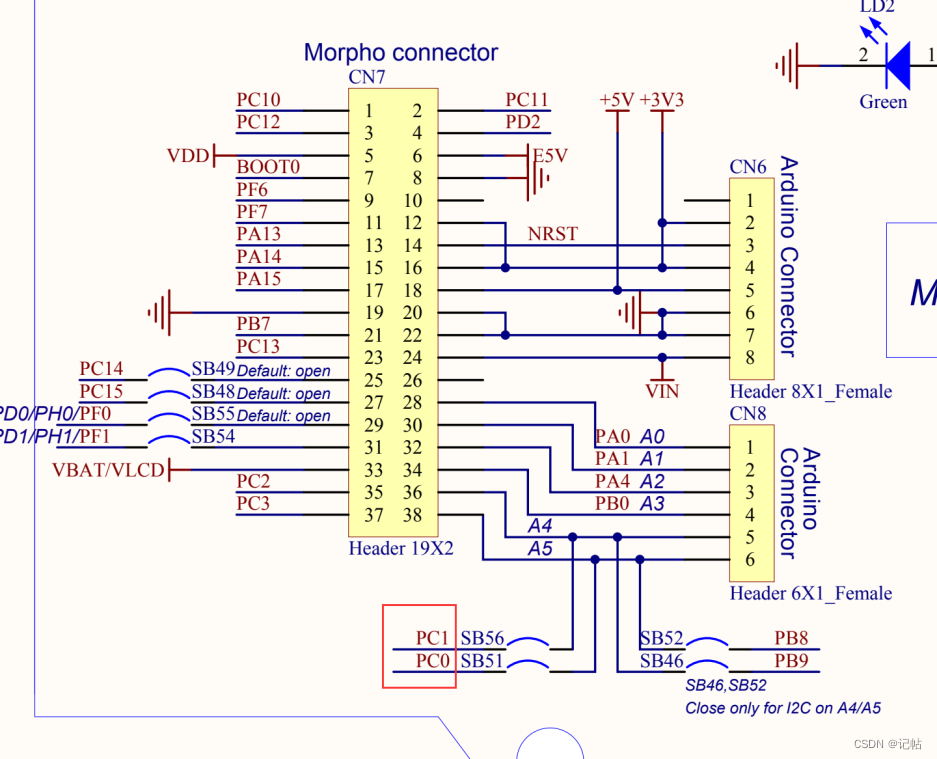
ADC通道配置
| ADC1 | IN0(PA0) | IN1(PA1) | IN4(PA4) |
|---|---|---|---|
| ADC2 | IN8(PB0) | IN10(PC0) | IN11(PC1) |
ADC1配置。

- ADCs_Common_Settings:
- Mode:Independent mod 獨立 ADC 模式,當使用一個 ADC 時是獨立模式,使用兩個 ADC 時是雙模式,在雙模式下還有很多細分模式可選,具體配置 ADC_CR1:DUALMOD 位。
- ADC_Settings:
- Data Alignment:
- Right alignment 轉換結果數據右對齊,一般我們選擇右對齊模式。
- Left alignment 轉換結果數據左對齊。
- Scan Conversion Mode:
- Disabled 禁止掃描模式。如果是單通道 AD 轉換使用 DISABLE。
- Enabled 開啟掃描模式。如果是多通道 AD 轉換使用 ENABLE。
- Continuous Conversion Mode:
- Disabled 單次轉換。轉換一次后停止需要手動控制才重新啟動轉換。
- Enabled 自動連續轉換。
- DiscontinuousConvMode:
- Disabled 禁止間斷模式。這個在需要考慮功耗問題的產品中很有必要,也就是在某個事件觸發下,開啟轉換。
- Enabled 開啟間斷模式。
- Data Alignment:
- ADC_Regular_ConversionMode:
- Enable Regular Conversions 是否使能規則轉換。
- Number Of Conversion ADC轉換通道數目,有幾個寫幾個就行。
- External Trigger Conversion Source 外部觸發選擇。這個有多個選擇,一般采用軟件觸發方式。
- Rank:
- Channel ADC轉換通道
- Sampling Time 采樣周期選擇,采樣周期越短,ADC 轉換數據輸出周期就越短但數據精度也越低,采樣周期越長,ADC 轉換數據輸出周期就越長同時數據精度越高。
- ADC_Injected_ConversionMode:
- Enable Injected Conversions 是否使能注入轉換。注入通道只有在規則通道存在時才會出現。
- WatchDog:
ADC2配置。

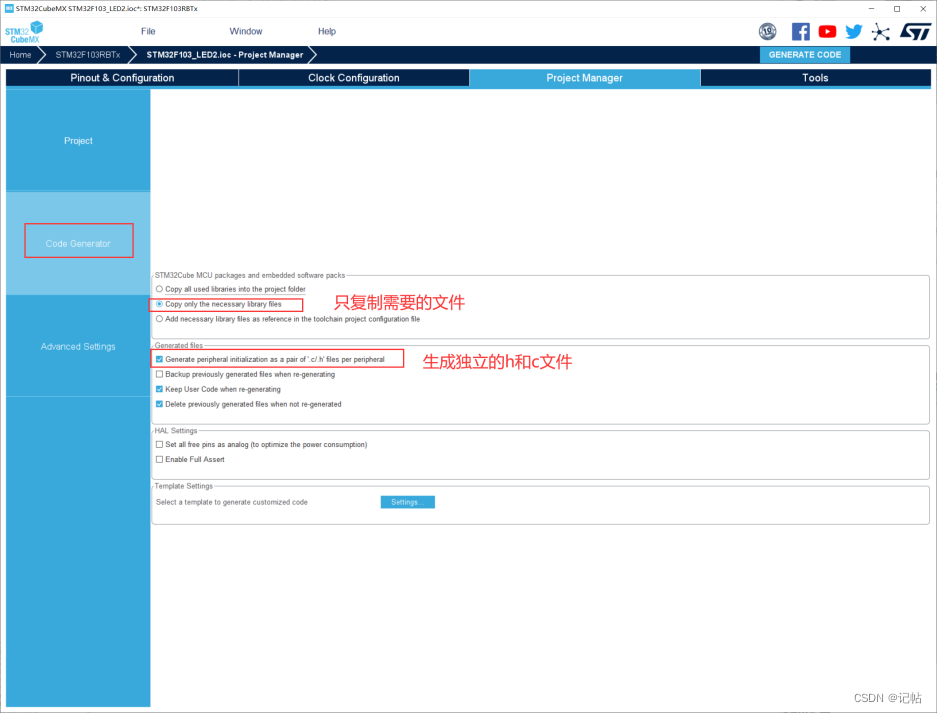
生成獨立的文件。
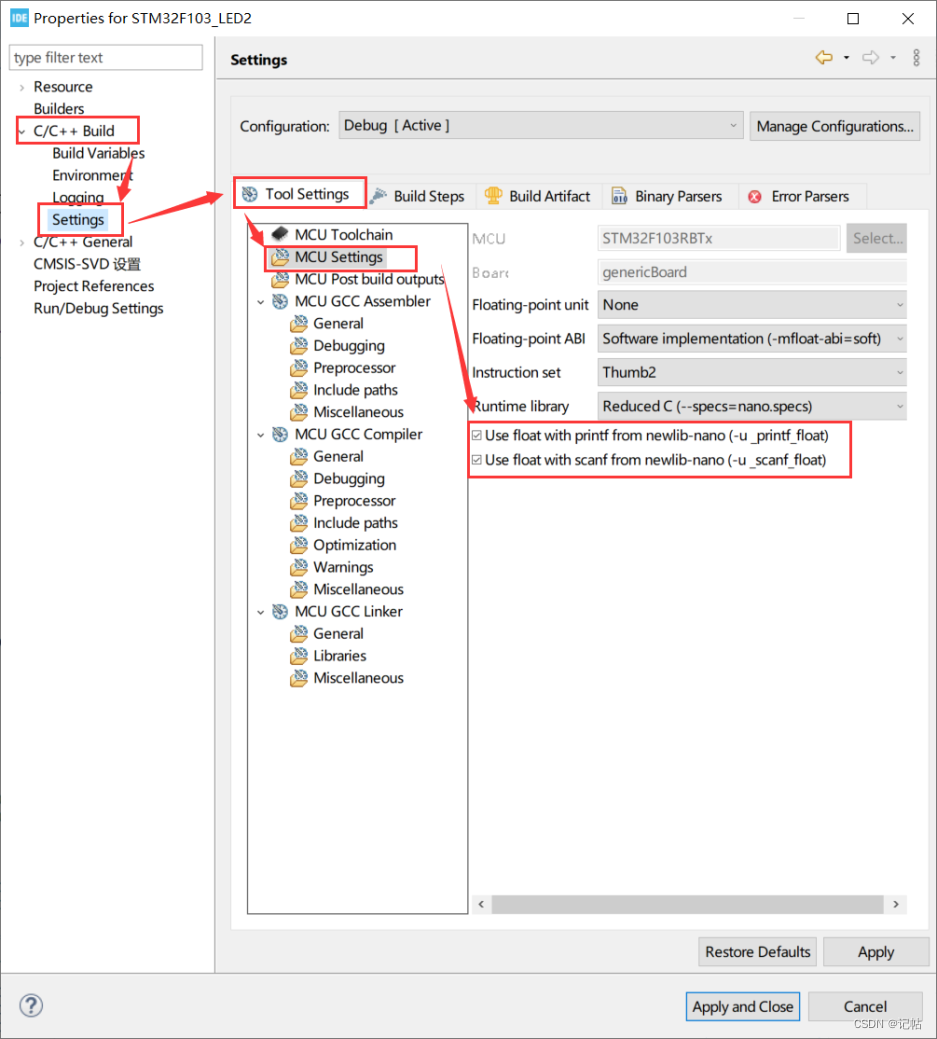
STM32CUBEIDE配置
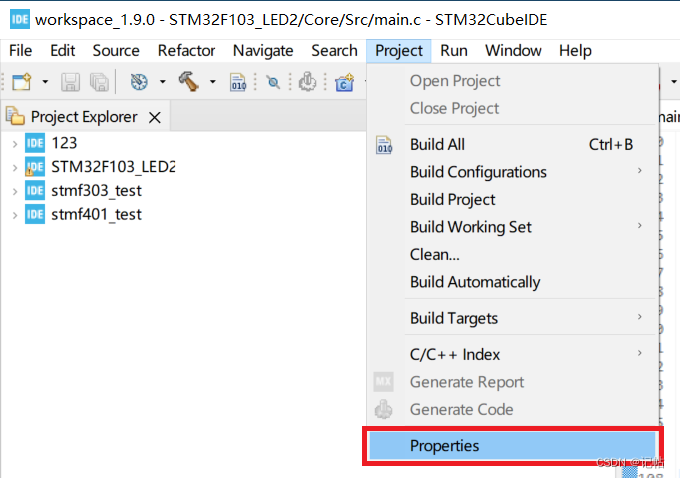
若需要打印浮點型,需要勾選下面的選項。
串口重定向
在main.c中,添加頭文件,若不添加會出現 identifier "FILE" is undefined報錯。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函數聲明和串口重定向:
/* USER CODE BEGIN PFP */
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart2 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
代碼
定義變量,存放采集到的數據。
/* USER CODE BEGIN 0 */
uint8_t i;
uint16_t adc1Buf[3];//ADC1數組
uint16_t adc2Buf[3];//ADC2數組
/* USER CODE END 0 */
ADC校準。
/* USER CODE BEGIN 2 */
HAL_ADCEx_Calibration_Start(&hadc1); //ADC校準
HAL_ADCEx_Calibration_Start(&hadc2); //ADC校準
printf("ADC Demo!\\r\\n");
/* USER CODE END 2 */
采集數據。
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
i=0;
while(i<3)
{
HAL_ADC_Start(&hadc1);//啟動ADC
HAL_ADC_PollForConversion(&hadc1,0xffff);//表示等待轉換完成,第二個參數表示超時時間,單位ms.
//HAL_ADC_GetState(&hadc1)為換取ADC狀態,HAL_ADC_STATE_REG_EOC表示轉換完成標志位,轉換數據可用。
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1),HAL_ADC_STATE_REG_EOC))//就是判斷轉換完成標志位是否設置,HAL_ADC_STATE_REG_EOC表示轉換完成標志位,轉換數據可用
{
//讀取ADC轉換數據,數據為12位。查看數據手冊可知,寄存器為16位存儲轉換數據,數據右對齊,則轉換的數據范圍為0~2^12-1,即0~4095.
adc1Buf[i]=HAL_ADC_GetValue(&hadc1);
i++;
}
}
printf("\\nadc1_IN0(PA0)=%4.0d,voltage=%1.4f",adc1Buf[0],adc1Buf[0]*3.3f/4095);
printf("\\nadc1_IN1(PA1)=%4.0d,voltage=%1.4f",adc1Buf[1],adc1Buf[1]*3.3f/4095);
printf("\\nadc1_IN4(PA4)=%4.0d,voltage=%1.4f",adc1Buf[2],adc1Buf[2]*3.3f/4095);
HAL_ADC_Stop(&hadc1);
HAL_Delay(500);
i=0;
while(i<3)
{
HAL_ADC_Start(&hadc2);//啟動ADC
HAL_ADC_PollForConversion(&hadc2,0xffff);//表示等待轉換完成,第二個參數表示超時時間,單位ms.
//HAL_ADC_GetState(&hadc1)為換取ADC狀態,HAL_ADC_STATE_REG_EOC表示轉換完成標志位,轉換數據可用。
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc2),HAL_ADC_STATE_REG_EOC))//就是判斷轉換完成標志位是否設置,HAL_ADC_STATE_REG_EOC表示轉換完成標志位,轉換數據可用
{
//讀取ADC轉換數據,數據為12位。查看數據手冊可知,寄存器為16位存儲轉換數據,數據右對齊,則轉換的數據范圍為0~2^12-1,即0~4095.
adc2Buf[i]=HAL_ADC_GetValue(&hadc2);
i++;
}
}
printf("\\nadc2_IN8(PB0)=%4.0d,voltage=%1.4f",adc2Buf[0],adc2Buf[0]*3.3f/4095);
printf("\\nadc2_IN10(PC0)=%4.0d,voltage=%1.4f",adc2Buf[1],adc2Buf[1]*3.3f/4095);
printf("\\nadc2_IN11(PC1)=%4.0d,voltage=%1.4f",adc2Buf[2],adc2Buf[2]*3.3f/4095);
HAL_ADC_Stop(&hadc2);
HAL_Delay(500);
}
/* USER CODE END 3 */
測試結果
輸入固定電壓進行測試。
| ADC1 | IN0(PA0) | IN1(PA1) | IN4(PA4) |
|---|---|---|---|
| 輸入電壓 | VCC | 2.0V | GND |
| ADC2 | IN8(PB0) | IN10(PC0) | IN11(PC1) |
| 輸入電壓 | VCC | GND | 2.0V |
測試結果如下。

審核編輯 黃昊宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
adc
+關注
關注
99文章
6656瀏覽量
548491 -
掃描
+關注
關注
0文章
203瀏覽量
25092
發布評論請先 登錄
相關推薦
熱點推薦
STM32CubeIDE SWV功能介紹
01 引言 STM32CubeIDE是ST官方推出的集成開發環境,集成了很多STM32的調試與開發工具。本文主要介紹如何使用SWV功能來打印輸出。 02 問題描述 客戶使用STM32CubeIDE

STM32CubeIDE使用
參考STM32CubeIDE屬于一站式工具,本文帶你體驗它的強大第一個STM32CubeIDE項目STM32CubeIDE使用記錄STM32CubeIDE使用筆記(03):使用ST-L
發表于 12-02 17:21
?29次下載

STM32CubeIDE的MCU開發
以前做stm32嵌入式開發均使用的是破解版的keil軟件,現在工作需要無法按照此步驟進行,最近針對ST官方免費軟件STM32CubeIDE進行了相關調研工作。1 STM32CubeIDE簡介目前主流
發表于 12-05 12:21
?25次下載
第一個STM32CubeIDE項目
使用STM32CubeIDE的第一個項目開始第一個項目添加代碼今天開始做一個STM32CubeIDE的第一個項目,首先需要說明的:STM32CubeIDE是一個免費的軟件開始第一個項目在文件菜單中選
發表于 12-29 19:29
?11次下載
AN5361_開始使用基于STM32CubeIDE雙核STM32H7微控制器的項目
AN5361_開始使用基于STM32CubeIDE雙核STM32H7微控制器的項目
發表于 11-21 08:11
?3次下載

STM32CUBEIDE(10)----ADC在DMA模式下掃描多個通道
本章STM32CUBEMX配置STM32F103的ADC在DMA模式掃描多個

STM32CubeIDE找不到elf
STM32CubeIDE是STMicroelectronics公司推出的一款集成開發環境(IDE),用于開發STM32系列微控制器的應用程序。它基于Eclipse開發平臺,并集成了ST的驅動程序





 工商網監
工商網監
評論