") 電驅(qū)動(dòng)系統(tǒng)耦合建模及動(dòng)力學(xué)特性分析
電驅(qū)動(dòng)系統(tǒng)耦合建模及動(dòng)力學(xué)特性分析
高速化、集成化電驅(qū)動(dòng)系統(tǒng)中存在的NVH問(wèn)題更加復(fù)雜,如:較高的輸入轉(zhuǎn)速導(dǎo)致系統(tǒng)固有頻率更加密集、局部模態(tài)增多;驅(qū)動(dòng)電機(jī)的扭矩波動(dòng)、徑向電磁力與齒輪傳遞誤差等多個(gè)振動(dòng)激勵(lì)源作用下的復(fù)雜動(dòng)態(tài)響應(yīng);電驅(qū)動(dòng)系統(tǒng)整體變形的強(qiáng)耦合性等因素產(chǎn)生的NVH問(wèn)題。相較于傳統(tǒng)的齒輪傳動(dòng)系統(tǒng),目前高速化、集成化的電驅(qū)動(dòng)系統(tǒng)新出現(xiàn)NVH問(wèn)題的重點(diǎn)、難點(diǎn)主要有以下三點(diǎn):轉(zhuǎn)速逐步提高的高速驅(qū)動(dòng)電機(jī)的影響;電機(jī)扭矩波動(dòng)、徑向力與齒輪傳遞誤差等多個(gè)激勵(lì)源的影響;考慮系統(tǒng)整體耦合變形的動(dòng)力學(xué)響應(yīng)分析建模。目前電驅(qū)系統(tǒng)減速器高速軸齒傳動(dòng)性能仿真技術(shù)正在處于發(fā)展階段,國(guó)內(nèi)外主機(jī)廠大部分處于起步階段,減速器軸齒性能仿真模型精度不高、系統(tǒng)集成度不高、效率低、計(jì)算分析結(jié)果不夠準(zhǔn)確。考慮驅(qū)動(dòng)電機(jī)結(jié)構(gòu)、齒輪-傳動(dòng)軸-軸承的轉(zhuǎn)子系統(tǒng)以及差速器殼體、電驅(qū)動(dòng)系統(tǒng)箱體等異形部件,搭建電驅(qū)動(dòng)系統(tǒng)剛?cè)狁詈蟿?dòng)力學(xué)模型,并給出了考慮驅(qū)動(dòng)電機(jī)徑向力、扭矩波動(dòng)以及齒輪傳遞誤差等振動(dòng)激勵(lì)源作用下的電驅(qū)動(dòng)系統(tǒng)動(dòng)力學(xué)響應(yīng)的分析方法。
引言
在傳統(tǒng)內(nèi)燃機(jī)汽車中,發(fā)動(dòng)機(jī)噪聲較好地掩蓋了齒輪傳動(dòng)系統(tǒng)的振動(dòng)噪聲,但在純電動(dòng)汽車中,由于發(fā)動(dòng)機(jī)噪聲掩蔽效應(yīng)的缺失,使得電磁噪聲及齒輪階次噪聲凸現(xiàn)。此外,高速化、集成化發(fā)展給電驅(qū)動(dòng)系統(tǒng)的NVH帶來(lái)了新的挑戰(zhàn)。目前電驅(qū)動(dòng)系統(tǒng)的高速驅(qū)動(dòng)電機(jī)的轉(zhuǎn)速普遍高達(dá)12 000 r/min~18 000 r/min,預(yù)計(jì)在未來(lái)會(huì)進(jìn)一步提高至20 000 r/min~25 000 r/min。高轉(zhuǎn)速導(dǎo)致高頻嘯叫,而且電驅(qū)動(dòng)系統(tǒng)的動(dòng)態(tài)響應(yīng)頻率進(jìn)一步提高至2k Hz~5k Hz,該頻率在人耳的敏感頻率范圍之內(nèi),嚴(yán)重影響了汽車的乘坐舒適性。電驅(qū)動(dòng)系統(tǒng)剛?cè)狁詈辖<皠?dòng)力學(xué)特性分析方法,包括電驅(qū)系統(tǒng)整體動(dòng)力學(xué)建模、電驅(qū)動(dòng)系統(tǒng)各部件剛?cè)狁詈辖!㈦婒?qū)動(dòng)系統(tǒng)動(dòng)力學(xué)響應(yīng)計(jì)算、電磁激勵(lì)下的電驅(qū)動(dòng)系統(tǒng)動(dòng)態(tài)響應(yīng)分析、齒輪傳遞誤差激勵(lì)下系統(tǒng)動(dòng)力學(xué)響應(yīng)分析。
1 電驅(qū)系統(tǒng)整體動(dòng)力學(xué)建模
針對(duì)多自由度系統(tǒng)的整體建模,首先需要將整個(gè)模型進(jìn)行離散化。目前常用的離散化方法主要有集中參數(shù)法和有限元建模法,基于有限元原理對(duì)具有復(fù)雜構(gòu)型的多自由系統(tǒng)進(jìn)行動(dòng)力學(xué)建模更加符合系統(tǒng)本質(zhì)特性,本文借鑒有限元法原理進(jìn)行電驅(qū)動(dòng)系統(tǒng)整體動(dòng)力學(xué)方程的建立。基于有限元原理的電驅(qū)系統(tǒng)動(dòng)力學(xué)方程由相應(yīng)的各零部件單元質(zhì)量矩陣、剛度矩陣、阻尼矩陣構(gòu)成。遵照以下原則:
(1)軸單元建模采用鐵木辛柯梁?jiǎn)卧M(jìn)行建模,考慮剪切變形,忽略摩擦因素;
(2)軸單元的質(zhì)量矩陣采用一致質(zhì)量矩陣,考慮相鄰節(jié)點(diǎn)的質(zhì)量耦合;
(3)以節(jié)點(diǎn)的形式將齒輪嚙合剛度的等效彈簧添加到傳動(dòng)軸上。電驅(qū)系統(tǒng)整體動(dòng)力學(xué)方程如下:
Mq+Cq+Kq=f
(1)
式中,M為系統(tǒng)質(zhì)量矩陣,C為阻尼矩,K為剛度矩陣,f為激振力矩陣。
求得各零部件單元的質(zhì)量矩陣、剛度矩陣、阻尼矩陣,就可按照一定的方式組裝入系統(tǒng)全局質(zhì)量矩陣、剛度矩陣、阻尼矩陣中,進(jìn)而可以利用數(shù)值計(jì)算方法進(jìn)行動(dòng)力學(xué)方程求解。
2 系統(tǒng)各部件剛?cè)狁詈辖?
電驅(qū)動(dòng)系統(tǒng)各部件剛?cè)狁詈辖0姍C(jī)及箱體柔性有限元建模、異形軸類部件的有限元建模、齒輪嚙合單元?jiǎng)恿W(xué)建模、軸承單元的動(dòng)力學(xué)建模。
2.1 電機(jī)及箱體柔性有限元建模
將箱體的三維幾何模型導(dǎo)入到有限元軟件進(jìn)行網(wǎng)格劃分。因電驅(qū)系統(tǒng)箱體是不規(guī)則殼體,所以這個(gè)過(guò)程首先需要做幾何清理,進(jìn)而是網(wǎng)格劃分、網(wǎng)格質(zhì)量檢查和網(wǎng)格處理的迭代過(guò)程,最終保證網(wǎng)格質(zhì)量、數(shù)量要求。
設(shè)置各部分殼體的有限元模型材料,包括密度、楊氏模量、泊松比等材料屬性;在輸入軸、中間軸、輸出軸、電機(jī)轉(zhuǎn)子軸對(duì)應(yīng)軸承座孔處建立凝聚節(jié)點(diǎn)的位置,使其與軸承外圈進(jìn)行耦合。在電驅(qū)系統(tǒng)箱體懸置點(diǎn)處添加約束,及箱體模型接地等邊界條件;對(duì)有限元模型進(jìn)行縮聚,最終得到箱體縮聚的剛度矩陣與質(zhì)量矩陣。
2.2 異形軸類部件的有限元建模
與電驅(qū)動(dòng)系統(tǒng)箱體不同之處,是差速器殼體由于是軸類零件,不需要進(jìn)行接地處理,但額外需要與齒輪輪輻進(jìn)行連接。
將差速器殼體的三維幾何模型導(dǎo)入到有限元軟件進(jìn)行網(wǎng)格劃分。因差速器殼體也是不規(guī)則殼體,所以這個(gè)過(guò)程首先需要做幾何清理,進(jìn)而是網(wǎng)格劃分、網(wǎng)格質(zhì)量檢查和網(wǎng)格處理的迭代過(guò)程,最終保證網(wǎng)格質(zhì)量、數(shù)量要求。
設(shè)置差速器殼體各部分有限元模型材料,包括密度、楊氏模量、泊松比等材料屬性。在差速器兩個(gè)軸承內(nèi)圈連接處中心建立凝聚節(jié)點(diǎn),同時(shí)在齒輪輪輻連接區(qū)域中心建立凝聚節(jié)點(diǎn),以及在差速器內(nèi)錐齒輪左右墊片處、上下定位銷處建立凝聚節(jié)點(diǎn)。并分別將軸承內(nèi)圈的連接區(qū)域和齒輪輪輻連接區(qū)域基于運(yùn)動(dòng)耦合約束連接至凝聚節(jié)點(diǎn)處。對(duì)有限元模型進(jìn)行縮聚,最終得到差殼縮聚的剛度矩陣與質(zhì)量矩陣。
2.3 齒輪嚙合單元?jiǎng)恿W(xué)建模
對(duì)于電驅(qū)動(dòng)系統(tǒng)減速器中的斜齒輪嚙合單元,按其結(jié)構(gòu)形式可劃分為輪齒嚙合部分及齒輪輪體部分。針對(duì)這兩部分需采用不同的建模方式進(jìn)行建模。
(1)針對(duì)輪輻,輪輻不是具有規(guī)則回轉(zhuǎn)結(jié)構(gòu)的回轉(zhuǎn)體,其包含減重孔。同差速器殼體一樣進(jìn)行有限元建模,其中輪輻只需連接軸外圈及齒輪嚙合位置的柔性節(jié)點(diǎn)圈。
(2)針對(duì)斜齒輪齒的建模,采用參數(shù)化建模。其中主要分成兩部分,為漸開(kāi)線嚙合部分、齒根圓弧部分。各部分的網(wǎng)格數(shù)量及大小可通過(guò)軟件識(shí)別齒輪的宏觀參數(shù)任意控制,同時(shí)生成這兩部分的有限元網(wǎng)格模型。
2.4 軸承單元的動(dòng)力學(xué)建模
由于軸承相比電驅(qū)動(dòng)系統(tǒng)其他各部件質(zhì)量小得多,故對(duì)軸承質(zhì)量忽略不計(jì)。另軸承內(nèi)圈與軸相配合,軸承外圈與殼體凝聚節(jié)點(diǎn)相耦合。其耦合方式有三種,分別為剛性模型、非耦合彈性支撐模型以及耦合彈性支撐模型,其中耦合彈性支撐模型最為普遍。同時(shí)考慮到電驅(qū)系統(tǒng)箱體柔性對(duì)軸承位移作用的影響,最終得到軸承和箱體單元的運(yùn)動(dòng)動(dòng)力學(xué)方程。
3 電驅(qū)系統(tǒng)動(dòng)力學(xué)響應(yīng)計(jì)算
3.1 齒輪副動(dòng)態(tài)嚙合剛度計(jì)算
動(dòng)態(tài)嚙合剛度指嚙合齒輪受到單位微米大小的正弦傳遞誤差激勵(lì)而計(jì)算出的動(dòng)態(tài)力,動(dòng)態(tài)嚙合剛度是隨齒輪嚙合頻率ω變化而動(dòng)態(tài)變化的輪齒嚙合剛度。
ω=n/60×Z
(2)
D(ω)=C(ω)-1
(3)
C(ω)=C1 (ω)+C2(ω)
(4)
式中,n為轉(zhuǎn)速,Z為齒數(shù),ω為齒輪嚙合頻率,D(ω)為當(dāng)頻率是ω時(shí)的齒輪嚙合線上的動(dòng)態(tài)嚙合剛度,C(ω)為兩齒輪總?cè)岫龋珻1(ω)和C2(ω)為主從齒輪在嚙合線上的柔度。
3.2 齒輪副動(dòng)態(tài)嚙合力計(jì)算
齒輪副動(dòng)態(tài)嚙合力是指嚙合齒輪副受到靜態(tài)傳遞誤差諧波激勵(lì)而計(jì)算出的輪齒動(dòng)態(tài)力。
Fi(ω)=D(ω)×δi
(5)
式中,F(xiàn)i(ω)為齒輪傳遞誤差第i階諧波的動(dòng)態(tài)嚙合力、δi為齒輪嚙合傳遞誤差的第i階諧波。
3.3 系統(tǒng)固有頻率及模態(tài)振型計(jì)算
(K-ω2rM)φr=0
(6)
式中,ωr為第r階固有頻率,φr為第r階固有振型,M為質(zhì)量矩陣,K為剛度矩陣。上式要求特征值ωr所對(duì)應(yīng)的特征向量φr是正交的,系統(tǒng)的質(zhì)量矩陣M及剛度矩陣K同時(shí)正交的,即可得到系統(tǒng)的固有頻率及模態(tài)振型。
4 電磁激勵(lì)下的電驅(qū)動(dòng)系統(tǒng)動(dòng)態(tài)響應(yīng)分析
4.1 電機(jī)扭矩波動(dòng)激勵(lì)下的系統(tǒng)動(dòng)態(tài)響應(yīng)分析
由電驅(qū)動(dòng)系統(tǒng)振動(dòng)噪聲的傳遞路徑可以得出,振動(dòng)噪聲傳至殼體之后,一方面通過(guò)殼體振動(dòng)直接向空氣中輻射噪聲,另一方面通過(guò)電驅(qū)動(dòng)系統(tǒng)與車輛的連接點(diǎn)向車輛其他部件傳遞振動(dòng),引起車輛其他部件的共振或者借助其他部件向外輻射噪聲。同時(shí)電驅(qū)動(dòng)系統(tǒng)與車輛的連接點(diǎn)一般為系統(tǒng)懸置點(diǎn)或者固定連接處,因此分析懸置點(diǎn)處的振動(dòng)加速度可對(duì)NVH性能進(jìn)行評(píng)價(jià)。分別對(duì)電機(jī)的扭矩波動(dòng)的24階、48階諧波所引起的對(duì)電驅(qū)系統(tǒng)的三個(gè)懸置點(diǎn)位置處的振動(dòng)加速度響應(yīng)做分析。
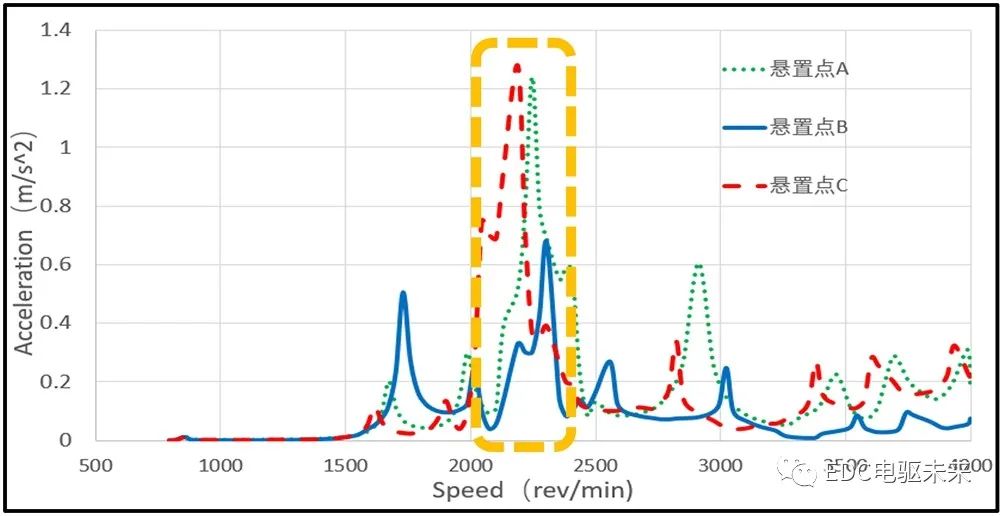
圖6 轉(zhuǎn)矩脈動(dòng)24階系統(tǒng)動(dòng)力學(xué)響應(yīng)
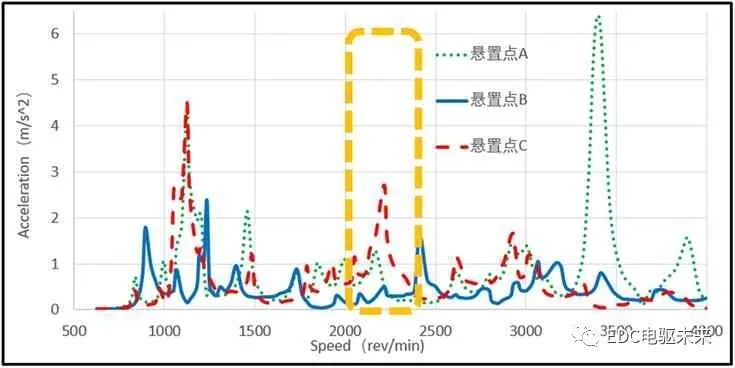
圖7 轉(zhuǎn)矩脈動(dòng)48階系統(tǒng)動(dòng)力學(xué)響應(yīng)
(1)由圖6、圖7可知,電機(jī)轉(zhuǎn)矩脈動(dòng)24階諧波和48階諧波的NVH激勵(lì)源作用下,懸置點(diǎn)A處的振動(dòng)加速度均值要比另外兩個(gè)懸置點(diǎn)B、C均值較大一些,這是,因?yàn)閼抑命c(diǎn)A處離NVH激勵(lì)源較近,因此受激勵(lì)源的影響較大;
(2)由圖6、圖7對(duì)比可知,轉(zhuǎn)矩脈動(dòng)48階諧波激勵(lì)下的振動(dòng)加速度均值要比24階高出一個(gè)量級(jí),轉(zhuǎn)矩脈動(dòng)24階諧波激勵(lì)下最大振動(dòng)加速度出現(xiàn)在2 200 r/min,其最大振動(dòng)加速度幅值為1.285 m/s2;而在轉(zhuǎn)矩脈動(dòng)48階諧波激勵(lì)下最大振動(dòng)加速度出現(xiàn)在3 750 r/min,其最大振動(dòng)加速度幅值為6.234 m/s2;這是由于扭矩波動(dòng)的48階諧波力比24階的諧波力更大;
(3)在24階次下,在輸入軸轉(zhuǎn)速2 300 r/min左右時(shí),懸置點(diǎn)A、B、C在898 Hz頻率時(shí)出現(xiàn)了共振峰,其振動(dòng)加速度幅值分別為1.225 m/s2、0.67 m/s2、1.285 m/s2,此共振峰峰值較大。同樣在48階次下,在輸入軸轉(zhuǎn)速2 300 r/min 左右時(shí),懸置點(diǎn)A、B、C在898 Hz頻率時(shí)出現(xiàn)了共振峰,其振動(dòng)加速度幅值分別為1.5 m/s2、0.4 m/s2、2.85 m/s2,此處共振峰值較大,需要重點(diǎn)關(guān)注該頻率的共振。
4.2 徑向電磁力激勵(lì)下的系統(tǒng)動(dòng)態(tài)響應(yīng)分析
同電機(jī)扭矩波動(dòng)相同,分別對(duì)電機(jī)的徑向電磁力激勵(lì)的24階、48階諧波所引起的對(duì)電驅(qū)系統(tǒng)的各個(gè)懸置點(diǎn)位置處的振動(dòng)加速度響應(yīng)做分析。
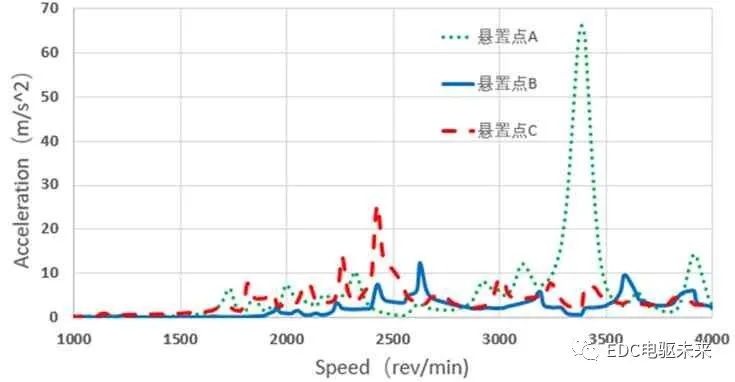
圖8 徑向電磁力24階系統(tǒng)動(dòng)力學(xué)響應(yīng)
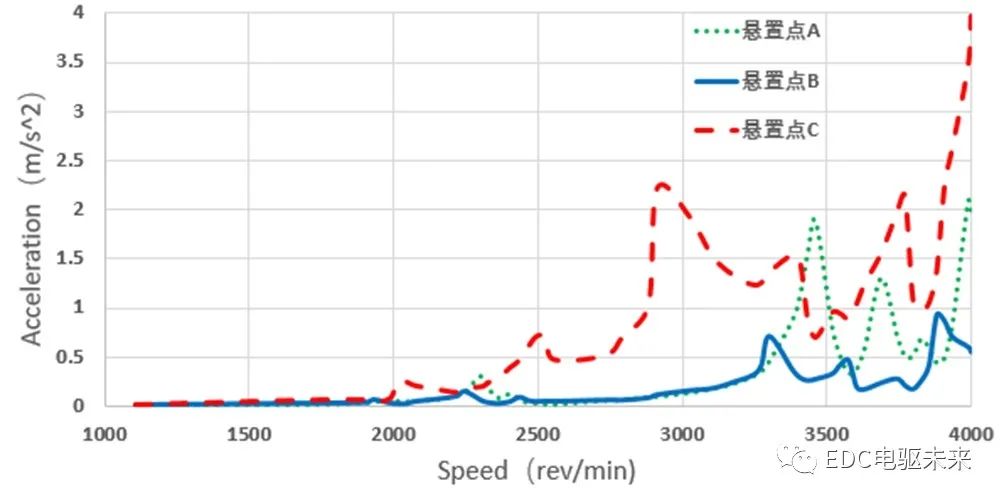
圖9 徑向電磁力48階系統(tǒng)動(dòng)力學(xué)響應(yīng)
(1)隨著諧波階次的增加,振動(dòng)加速度幅值在0~4 000 r/min 范圍內(nèi)也是依次增加的,而徑向電磁力24階、48階的諧波力幅值則是降低的,這是由于諧波階次增加,其工作頻率也在相應(yīng)增加,因此其幅值也相應(yīng)地更高,而在相同的工作頻率下對(duì)比,則其振動(dòng)加速度幅值與諧波力幅值的表現(xiàn)一致。
(2)懸置點(diǎn)A、C在轉(zhuǎn)速為3 690 r/min出現(xiàn)了共振峰,其24階振動(dòng)加速度峰值分別為1.35 m/s2、2.12 m/s2,其共振的固有頻率可能為2 950 Hz;懸置點(diǎn)B、C在轉(zhuǎn)速為2 450 r/min 出現(xiàn)了共振峰,其48階振動(dòng)加速度峰值分別為7.05 m/s2、26.0 m/s2,其共振的固有頻率可能為1 950 Hz;懸置點(diǎn)A在轉(zhuǎn)速為3 460 r/min 時(shí)出現(xiàn)了一個(gè)較大的共振峰,其48階振動(dòng)加速度幅值為68 m/s2,其共振的固有頻率可能為2 800 Hz,需重點(diǎn)關(guān)注這幾個(gè)頻率的共振。
5 齒輪傳遞誤差激勵(lì)下系統(tǒng)動(dòng)力學(xué)響應(yīng)分析
分別對(duì)減速器齒輪嚙合的一、二級(jí)兩對(duì)齒輪副的傳遞誤差進(jìn)行傅里葉變換,分別獲得起傳遞誤差各階諧波,由于傳遞誤差的二階及以上諧波幅值較小,可忽略不計(jì)。故只考慮將一二級(jí)齒輪的一階諧波作為NVH的激勵(lì)源。分析一、二級(jí)齒輪副的激勵(lì)源所引起的對(duì)電驅(qū)系統(tǒng)的各個(gè)懸置點(diǎn)位置處的振動(dòng)加速度響應(yīng)。
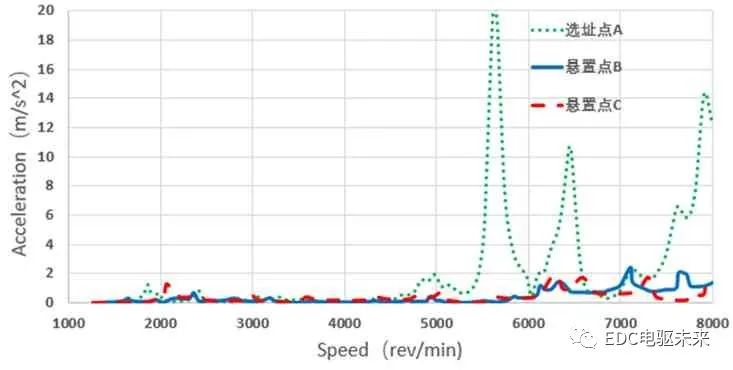
圖10 一級(jí)齒輪TE的動(dòng)力學(xué)響應(yīng)
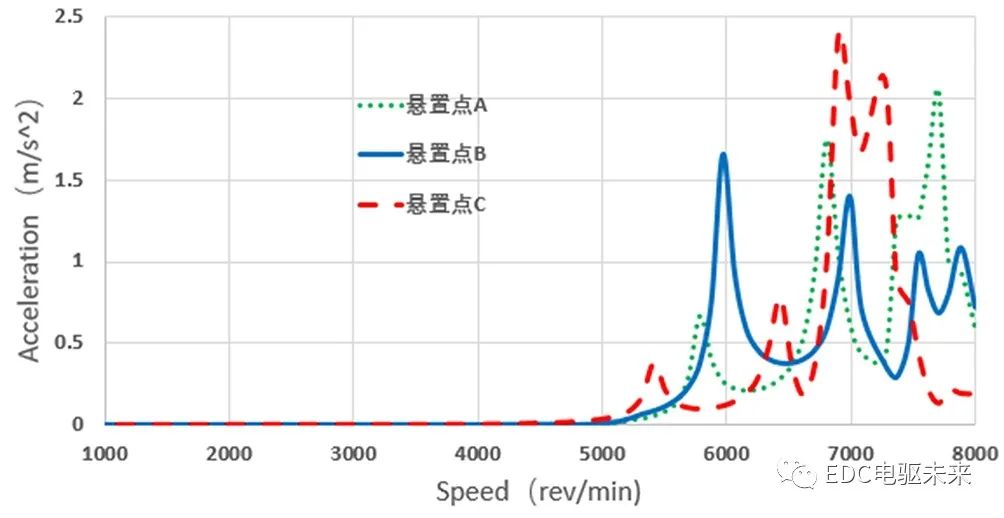
圖11 二級(jí)齒輪TE的動(dòng)力學(xué)響應(yīng)
(1)在輸入軸低轉(zhuǎn)速的情況下,系統(tǒng)振動(dòng)及速度幅值較低,隨轉(zhuǎn)速增加,振動(dòng)加速度幅值總體呈上升趨勢(shì);
(2)傳遞誤差越小,一階諧波幅值越小,振動(dòng)加速度幅值越小,越有利于NVH;
(3)將一、二級(jí)齒輪副嚙合引起的振動(dòng)加速度幅值同電機(jī)扭矩波動(dòng)、徑向電磁力激勵(lì)下的振動(dòng)加速度幅值進(jìn)行比較,可得出二者對(duì)系統(tǒng)NVH的貢獻(xiàn)量,振動(dòng)加速度幅值越大,貢獻(xiàn)量越大;
(4)在二級(jí)齒輪副嚙合階次下,在轉(zhuǎn)速為6 950 r/min附近時(shí),三個(gè)懸置點(diǎn)出現(xiàn)了第一次共振峰,三個(gè)懸置點(diǎn)處的加速度峰值分別為1.76 m/s2、1.41 m/s2、2.39 m/s2,在此轉(zhuǎn)速附近,具有2 750 Hz與3 290 Hz的固有頻率;這種情況是激發(fā)起系統(tǒng)的某一固有頻率引起的,需重點(diǎn)關(guān)注該固有頻率的共振情況。
6 結(jié)論
針對(duì)電驅(qū)動(dòng)系統(tǒng)NVH分析及優(yōu)化中存在的高轉(zhuǎn)速、多源激勵(lì)以及整體強(qiáng)耦合性等難題,基于有限元及動(dòng)力學(xué)建模方法,搭建了電驅(qū)動(dòng)整體剛?cè)狁詈蟿?dòng)力學(xué)模型。本文分別對(duì)驅(qū)動(dòng)電機(jī)及箱體的有限元建模以及齒輪傳動(dòng)系統(tǒng)動(dòng)力學(xué)建模兩大方面進(jìn)行了詳細(xì)建模。針對(duì)驅(qū)動(dòng)電機(jī)建模部分,采用有限元模型縮聚的方式進(jìn)行了電驅(qū)動(dòng)箱體與電機(jī)定子的建模工作,同時(shí)還有對(duì)電磁力的施加處理方法。針對(duì)齒輪傳動(dòng)系統(tǒng),建立了彈性軸段、斜齒輪嚙合單元、差速器殼體單元以及軸承單元的動(dòng)力學(xué)模型。基于以上建模流程,形成了電驅(qū)動(dòng)系統(tǒng)整體剛?cè)狁詈辖7椒ā=酉聛?lái)給出了電驅(qū)動(dòng)系統(tǒng)動(dòng)力學(xué)響應(yīng)的計(jì)算方法。最后,針對(duì)驅(qū)動(dòng)電機(jī)徑向力、轉(zhuǎn)矩脈動(dòng)以及齒輪副傳遞誤差等 NVH 激勵(lì)源作用下的系統(tǒng)動(dòng)態(tài)響應(yīng)進(jìn)行了對(duì)比分析。
審核編輯:郭婷
-
發(fā)動(dòng)機(jī)
+關(guān)注
關(guān)注
33文章
2524瀏覽量
70498 -
減速器
+關(guān)注
關(guān)注
7文章
406瀏覽量
23675 -
驅(qū)動(dòng)電機(jī)
+關(guān)注
關(guān)注
9文章
419瀏覽量
31138
原文標(biāo)題:電驅(qū)動(dòng)系統(tǒng)耦合建模及動(dòng)力學(xué)特性分析
文章出處:【微信號(hào):EDC電驅(qū)未來(lái),微信公眾號(hào):EDC電驅(qū)未來(lái)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車垂向動(dòng)力學(xué)控制研究綜述
Adams多體動(dòng)力學(xué)仿真解決方案全面解析
電力拖動(dòng)系統(tǒng)的動(dòng)力學(xué)課件
[下載]想了解多體動(dòng)力學(xué)軟件嗎?有教程分享及免費(fèi)試用下載
基于多體系統(tǒng)動(dòng)力學(xué)的空氣懸架大客車平順性試驗(yàn)仿真研究
分布式驅(qū)動(dòng)電動(dòng)汽車的動(dòng)力學(xué)控制有哪幾種類型?常見(jiàn)問(wèn)題是什么?
熱分析動(dòng)力學(xué)
四翼超混沌系統(tǒng)的動(dòng)力學(xué)特性分析及其電路實(shí)現(xiàn)
機(jī)械系統(tǒng)動(dòng)力學(xué)分析及ADAMS應(yīng)用電子教程免費(fèi)下載
Matlab_Simulink動(dòng)力學(xué)系統(tǒng)建模與仿真01.pdf
Matlab_Simulink動(dòng)力學(xué)系統(tǒng)建模與仿真02.pdf
基于車輛動(dòng)力學(xué)模型的橫向控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論