") 輪速傳感器AK傳輸協(xié)議學(xué)習(xí)
輪速傳感器AK傳輸協(xié)議學(xué)習(xí)
AK協(xié)議用于數(shù)據(jù)信號(hào)的傳輸,它是一種輪速傳感器(WSS)和電子控制單元(ECU)的標(biāo)準(zhǔn)接口。由傳感器產(chǎn)生的信號(hào)經(jīng)過(guò)信號(hào)調(diào)理單元處理,產(chǎn)生速度信號(hào)和數(shù)據(jù)信號(hào)。
1.AK協(xié)議定義
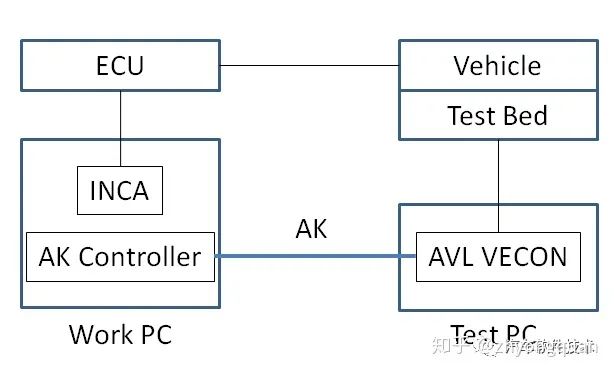
AK協(xié)議是控制器和測(cè)量設(shè)備之間通信的方式,廣泛應(yīng)用于整車耐久轉(zhuǎn)轂等測(cè)試中,如AVL VECON。人們通常都是用VECON界面設(shè)置試驗(yàn)曲線,但通過(guò)AK可以實(shí)現(xiàn)設(shè)備的自動(dòng)化。如下圖所示:集合INCA和AK,實(shí)現(xiàn)了閉環(huán)控制,可用于重復(fù)的試驗(yàn),如失火等。
AK信號(hào)的格式如Fig 6所示。
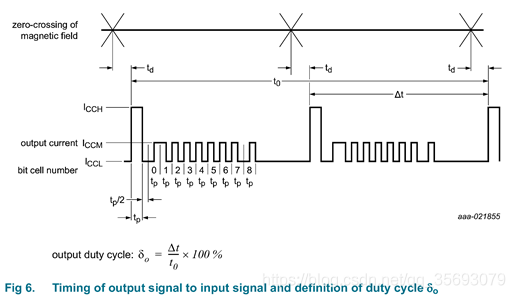
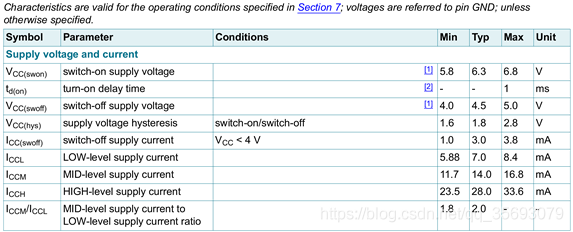
一幀AK信號(hào)包含速度脈沖(speed pulse)和數(shù)據(jù)協(xié)議位(data protocol bits),對(duì)應(yīng)著速度信號(hào)和數(shù)據(jù)信號(hào)。速度脈沖反映齒輪的結(jié)構(gòu),且可根據(jù)相鄰兩個(gè)速度脈沖的時(shí)間間隔算出輪速。數(shù)據(jù)協(xié)議位表示其他額外信息,比如旋轉(zhuǎn)方向、場(chǎng)幅度(field amplitude)等內(nèi)容。AK信號(hào)是通過(guò)改變電流的大小來(lái)傳輸數(shù)據(jù),電流分為三級(jí)。高等級(jí)電流(I_CCH,HIGH-level supply current),一般取28mA,用于速度脈沖;中等級(jí)電流(I_CCM,MID-level supply current),一般取14mA,用于數(shù)據(jù)協(xié)議位;低等級(jí)電流(I_CCL,LOW-level supply current),一般取7mA,用于表示信號(hào)中的低電平。
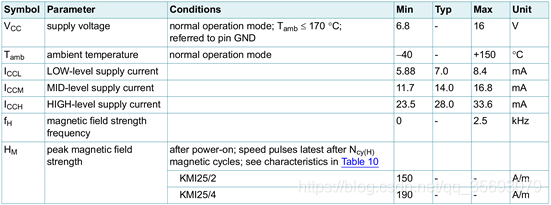
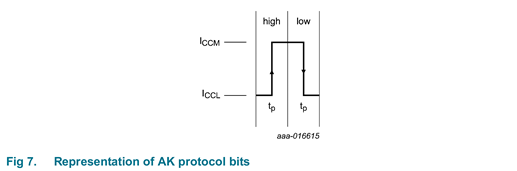
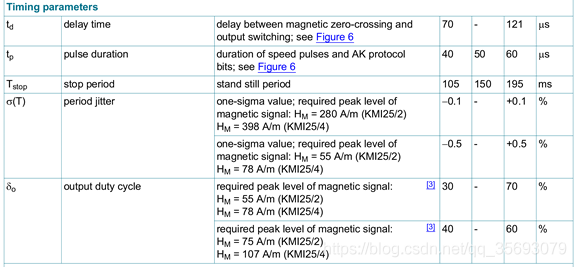
當(dāng)傳感器檢測(cè)到過(guò)零輸入信號(hào)時(shí)(即檢測(cè)到磁場(chǎng)為0),延時(shí)t_d(70~121us)后輸出一個(gè)速度脈沖,脈沖寬度為t_p(通常為50us)。速度脈沖后面是數(shù)據(jù)協(xié)議位,最多有9個(gè)的數(shù)據(jù)單元。每個(gè)數(shù)據(jù)單元表示1位數(shù)據(jù),所占時(shí)長(zhǎng)為t_p。在速度脈沖和數(shù)據(jù)協(xié)議位的第一個(gè)數(shù)據(jù)單元之間存在t_p/2的時(shí)間間隔。 下圖(Fig 7)是協(xié)議數(shù)據(jù)位的表示方法。在數(shù)據(jù)單元的時(shí)間段內(nèi),若檢測(cè)到電流上升沿則表示數(shù)據(jù)1,電流下降沿表示數(shù)據(jù)0。若不存在電流邊沿,則該位數(shù)據(jù)無(wú)效。
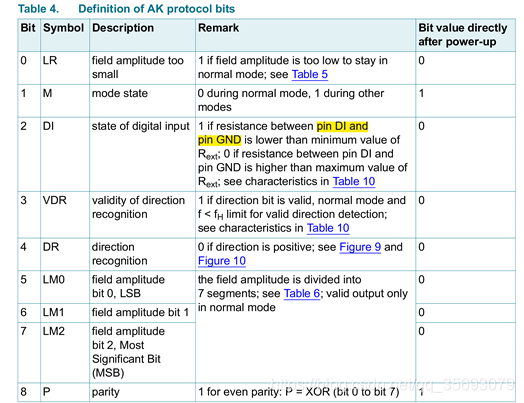
協(xié)議數(shù)據(jù)位最多有9位,每一位的定義如Table 4。
2 AK信號(hào)的兩種狀態(tài)
根據(jù)輸入信號(hào)的頻率不同,發(fā)出的AK信號(hào)將會(huì)有兩種狀態(tài):低速運(yùn)行和高速運(yùn)行。
2.1 低速運(yùn)行
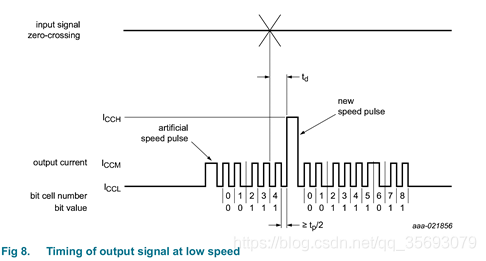
當(dāng)輸入信號(hào)頻率較低,以至于距離上次檢測(cè)到過(guò)零輸入信號(hào)的時(shí)間已超過(guò)T_stop(通常為150ms)時(shí),仍未有新的過(guò)零輸入信號(hào)出現(xiàn),則將信號(hào)重新發(fā)送一遍,但速度脈沖用電流大小為I_CCM的人工速度脈沖代替。若繼續(xù)T_stop后依然未檢測(cè)到過(guò)零輸入信號(hào),繼續(xù)重復(fù)發(fā)送。如果在1秒內(nèi)沒(méi)有檢測(cè)到過(guò)零信號(hào),或相關(guān)遲滯電平在250毫秒內(nèi)沒(méi)有通過(guò),系統(tǒng)進(jìn)入低速模式,協(xié)議數(shù)據(jù)位中的模式位(M)由0變?yōu)?。在重復(fù)發(fā)送信號(hào)時(shí),若一幀信號(hào)還沒(méi)發(fā)送完時(shí)檢測(cè)到了過(guò)零信號(hào)輸入,則發(fā)送新速度脈沖之前終止重復(fù)傳輸。因存在延時(shí)t_d,所以在檢測(cè)到過(guò)零信號(hào)后正在發(fā)送的數(shù)據(jù)單元可以正常發(fā)送完畢,并且發(fā)送新速度脈沖前存在至少t_p/2的時(shí)間間隔。如Fig 8所示。
2.2 高速運(yùn)行
當(dāng)輸入信號(hào)的頻率很高時(shí),速度脈沖后面的9個(gè)數(shù)據(jù)單元并不一定會(huì)全部發(fā)送,但正在發(fā)送的數(shù)據(jù)單元都可以正常發(fā)送完畢,而且每幀數(shù)據(jù)一定存在一個(gè)速度脈沖。這種運(yùn)行狀態(tài)和低速運(yùn)行中重復(fù)發(fā)送信號(hào)的終止方式一致,如Fig 8所示。
3 相關(guān)參數(shù)
CH50X 系列是帶AK協(xié)議的ABS輪速傳感器IC,包含多個(gè)產(chǎn)品型號(hào):CH503/CH504/CH505等,支持方波/PWM/AK輸出協(xié)議,可支持功能安全ASIL-B系統(tǒng)。該系列產(chǎn)品的工作電壓范圍覆蓋4.5V-20V,工作溫度支持-40~150度,適用于收集齒輪轉(zhuǎn)速、位置和方向檢測(cè)以及需要一定精確級(jí)別的邊緣檢測(cè),如汽車凸輪軸傳感。
【產(chǎn)品優(yōu)勢(shì)】
CH503/CH504/CH505等多種型號(hào)
支持標(biāo)準(zhǔn)輸出/PWM輸出/AK輸出協(xié)議
可支持功能安全ASIL-B系統(tǒng)
技術(shù)規(guī)格:
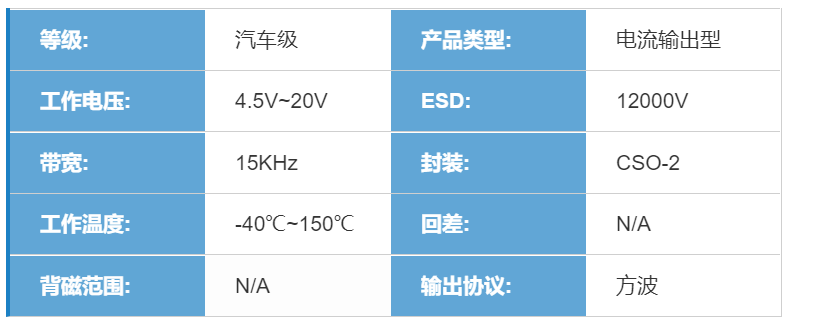
應(yīng)用:變速箱,汽車凸輪軸
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2564文章
52706瀏覽量
764624 -
控制器
+關(guān)注
關(guān)注
114文章
17022瀏覽量
183275 -
傳輸協(xié)議
+關(guān)注
關(guān)注
0文章
79瀏覽量
11694 -
輪速傳感器
+關(guān)注
關(guān)注
1文章
29瀏覽量
7669
原文標(biāo)題:輪速傳感器AK傳輸協(xié)議學(xué)習(xí)
文章出處:【微信號(hào):dldzjsyyy,微信公眾號(hào):電力電子技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論