") 基于MATLAB的關(guān)節(jié)型六軸機(jī)械臂軌跡規(guī)劃仿真
基于MATLAB的關(guān)節(jié)型六軸機(jī)械臂軌跡規(guī)劃仿真
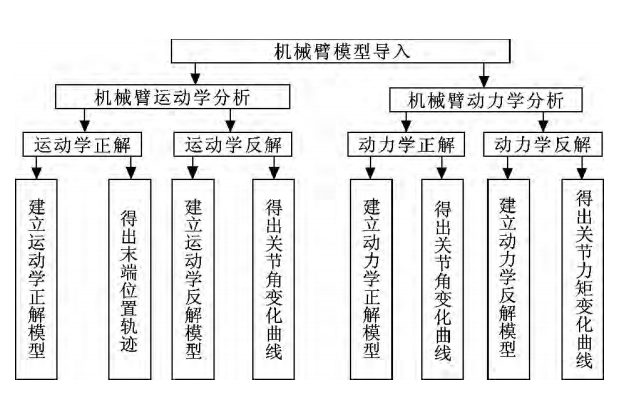
1.實(shí)驗(yàn)?zāi)康?/strong>
基于機(jī)器人學(xué)理論知識(shí),利用標(biāo)準(zhǔn)D-H參數(shù)法建立關(guān)節(jié)型機(jī)器人的數(shù)學(xué)模型,使用Matlab的Robotics Toolbox工具包搭建模型。
tip:實(shí)驗(yàn)工具:Matlab R2021a (有很多玄學(xué)問(wèn)題是因?yàn)檐浖姹荆?br /> 以及注意先安裝Robotics Toolbox工具包!!
2.實(shí)驗(yàn)內(nèi)容
2.1標(biāo)準(zhǔn)D-H參數(shù)法
標(biāo)準(zhǔn)D-H參數(shù)法常用于建立關(guān)節(jié)型機(jī)器人的數(shù)學(xué)模型,D-H參數(shù)法是一種對(duì)連桿的坐標(biāo)描述,而關(guān)節(jié)機(jī)器人本質(zhì)上就是一系列連桿通過(guò)關(guān)節(jié)連接起來(lái)而組成的空間開(kāi)式運(yùn)動(dòng)鏈。
對(duì)于連桿本身,其功能在于保持其兩端的關(guān)節(jié)軸線具有固定的幾何關(guān)系,連桿的特性由軸線決定,通常用四個(gè)連桿參數(shù)來(lái)描述,連桿長(zhǎng)度,連桿扭轉(zhuǎn)角,連桿偏移量和關(guān)節(jié)角。
本實(shí)驗(yàn)給定的參數(shù)表:
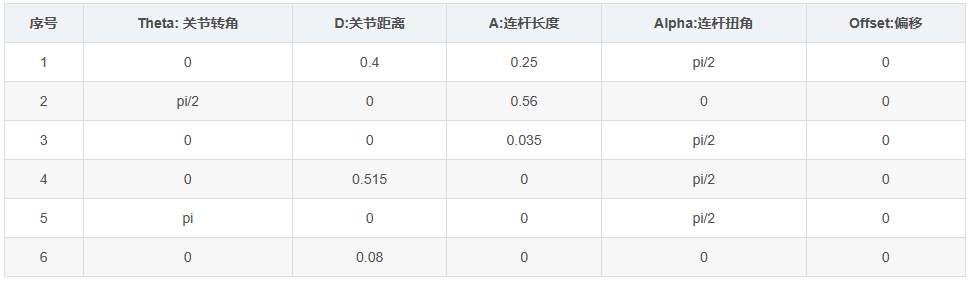
2.2實(shí)驗(yàn)中使用的Matlab函數(shù)
Link函數(shù)
用于定義六軸機(jī)器人的一個(gè)軸。
包含了機(jī)器人的運(yùn)動(dòng)學(xué)參數(shù)、動(dòng)力學(xué)參數(shù)、剛體慣性矩參數(shù)、電機(jī)和傳動(dòng)參數(shù);
可采用DH法建立模型,其中包含參數(shù):關(guān)節(jié)轉(zhuǎn)角,關(guān)節(jié)距離,連桿長(zhǎng)度,連桿轉(zhuǎn)角,關(guān)節(jié)類型(0轉(zhuǎn)動(dòng),1移動(dòng))。
% 定義六軸機(jī)器人的一個(gè)軸 L(1) = Link([theta1, D1, A1, alpha1, offset1], 'standard')
SerialLink函數(shù)
用于構(gòu)建機(jī)械臂。
它的類函數(shù)比較多,包括顯示機(jī)器人、動(dòng)力學(xué)、逆動(dòng)力學(xué)、雅可比等;
% 'six'為機(jī)械臂名稱 robot = SerialLink(L,'name','six');
fkine正解函數(shù)
用于求解出末端位姿p。
theta = [0.1,0,0,0,0,0]; %指定的關(guān)節(jié)角 p=robot.fkine(theta) %fkine正解函數(shù),根據(jù)關(guān)節(jié)角theta,求解出末端位姿p
ikine逆解函數(shù)
用于求解出關(guān)節(jié)角q。
q=ikine(robot,p) %ikine逆解函數(shù),根據(jù)末端位姿p,求解出關(guān)節(jié)角q
軌跡規(guī)劃
(1)jtraj
已知初始和終止的關(guān)節(jié)角度,利用五次多項(xiàng)式來(lái)規(guī)劃軌跡;
T1=transl(0.5,0,0); %根據(jù)給定起始點(diǎn),得到起始點(diǎn)位姿 T2=transl(0,0.5,0); %根據(jù)給定終止點(diǎn),得到終止點(diǎn)位姿 init_ang=robot2.ikine(T1);%根據(jù)起始點(diǎn)位姿,得到起始點(diǎn)關(guān)節(jié)角 targ_ang=robot2.ikine(T2);%根據(jù)終止點(diǎn)位姿,得到終止點(diǎn)關(guān)節(jié)角 step = 20; [q ,qd, qdd]=jtraj(init_ang,targ_ang,step); %五次多項(xiàng)式軌跡,得到關(guān)節(jié)角度,角速度,角加速度,50為采樣點(diǎn)個(gè)數(shù)
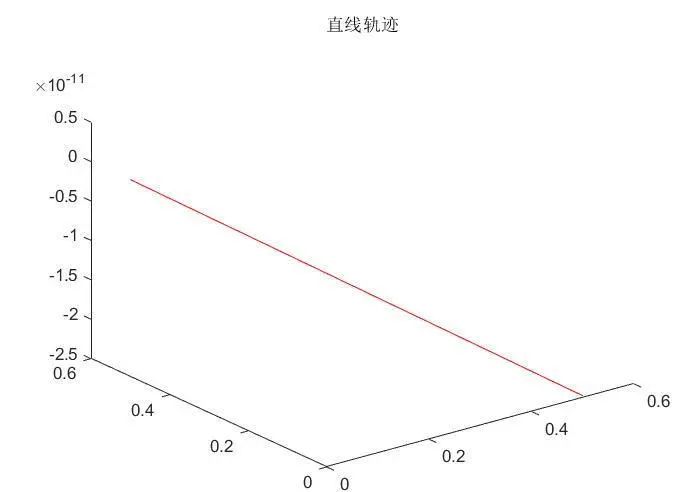
(2)ctraj
已知初始和終止的末端關(guān)節(jié)位姿,利用勻加速、勻減速運(yùn)動(dòng)來(lái)規(guī)劃軌跡。
T0 = robot2.fkine(init_ang);%運(yùn)動(dòng)學(xué)正解 T1 = robot2.fkine(targ_ang);%運(yùn)動(dòng)學(xué)正解 Tc = ctraj(T0,T1,step); %得到每一步的T陣 tt = transl(Tc);
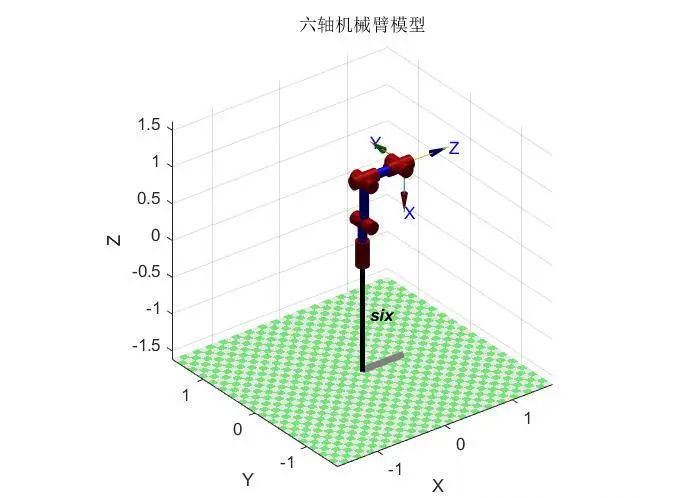
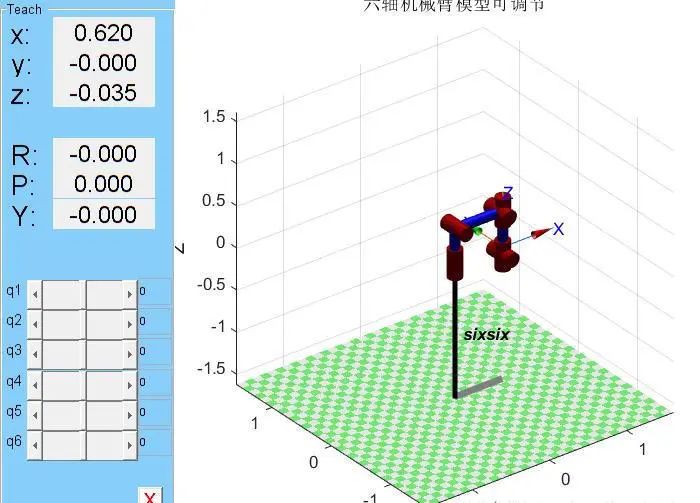
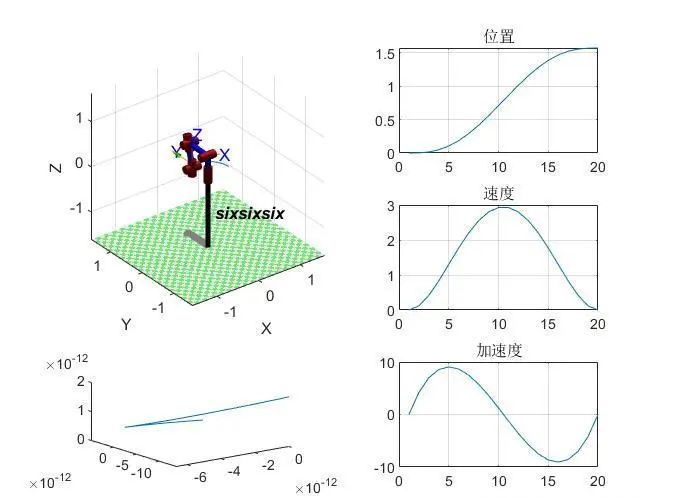
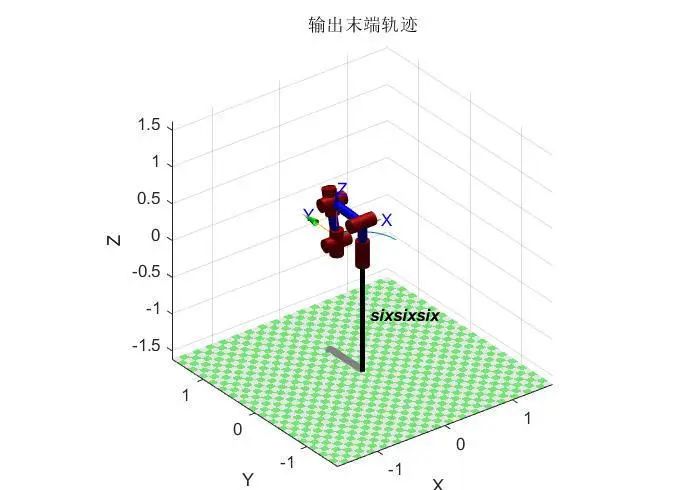
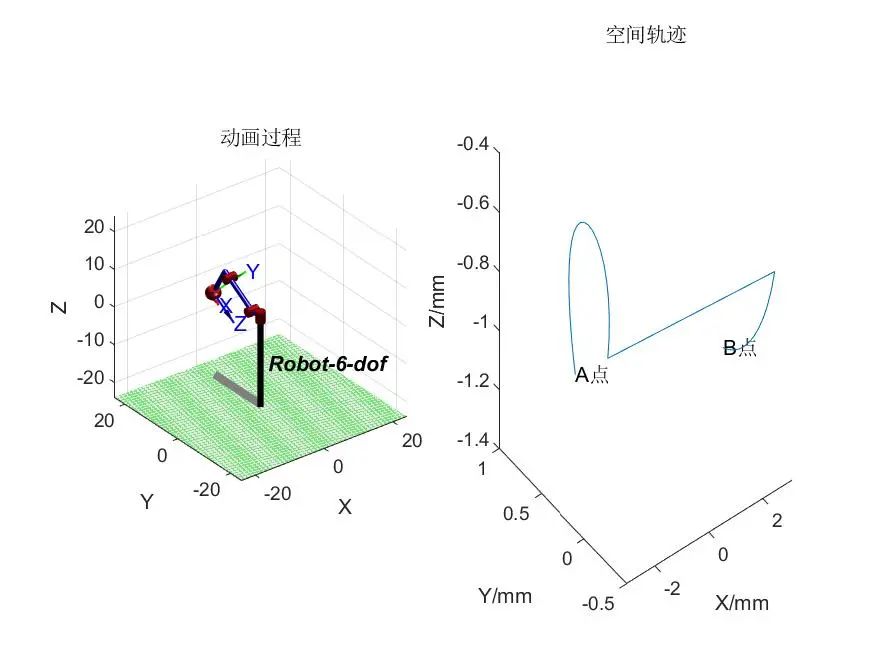
3.實(shí)驗(yàn)結(jié)果
4.全部代碼
%% MATLAB素質(zhì)三連 clear; close all; clc; %% 實(shí)驗(yàn)一 基于MATLAB的關(guān)節(jié)型六軸機(jī)械臂仿真 %% 參數(shù)定義 %機(jī)械臂為六自由度機(jī)械臂 clear L; %角度轉(zhuǎn)換 angle=pi/180; %度 %D-H參數(shù)表 theta1 = 0; D1 = 0.4; A1 = 0.025; alpha1 = pi/2; offset1 = 0; theta2 = pi/2;D2 = 0; A2 = 0.56; alpha2 = 0; offset2 = 0; theta3 = 0; D3 = 0; A3 = 0.035; alpha3 = pi/2; offset3 = 0; theta4 = 0; D4 = 0.515; A4 = 0; alpha4 = pi/2; offset4 = 0; theta5 = pi; D5 = 0; A5 = 0; alpha5 = pi/2; offset5 = 0; theta6 = 0; D6 = 0.08; A6 = 0; alpha6 = 0; offset6 = 0; %% DH法建立模型,關(guān)節(jié)轉(zhuǎn)角,關(guān)節(jié)距離,連桿長(zhǎng)度,連桿轉(zhuǎn)角,關(guān)節(jié)類型(0轉(zhuǎn)動(dòng),1移動(dòng)) L(1) = Link([theta1, D1, A1, alpha1, offset1], 'standard') L(2) = Link([theta2, D2, A2, alpha2, offset2], 'standard') L(3) = Link([theta3, D3, A3, alpha3, offset3], 'standard') L(4) = Link([theta4, D4, A4, alpha4, offset4], 'standard') L(5) = Link([theta5, D5, A5, alpha5, offset5], 'standard') L(6) = Link([theta6, D6, A6, alpha6, offset6], 'standard') % 定義關(guān)節(jié)范圍 L(1).qlim =[-180*angle, 180*angle]; L(2).qlim =[-180*angle, 180*angle]; L(3).qlim =[-180*angle, 180*angle]; L(4).qlim =[-180*angle, 180*angle]; L(5).qlim =[-180*angle, 180*angle]; L(6).qlim =[-180*angle, 180*angle]; %% 顯示機(jī)械臂 robot0 = SerialLink(L,'name','six'); f = 1 %畫在第1張圖上 theta = [0 pi/2 0 0 pi 0]; %初始關(guān)節(jié)角度 figure(f) robot0.plot(theta); title('六軸機(jī)械臂模型'); %% 加入teach指令,則可調(diào)整各個(gè)關(guān)節(jié)角度 robot1 = SerialLink(L,'name','sixsix'); f = 2 figure(f) robot1.plot(theta); robot1.teach title('六軸機(jī)械臂模型可調(diào)節(jié)'); %% 實(shí)驗(yàn)二 基于MATLAB的六軸機(jī)械臂軌跡規(guī)劃仿真 %% 2.2求解運(yùn)動(dòng)學(xué)正解 robot2 = SerialLink(L,'name','sixsixsix'); theta2 = [0.1,0,0,0,0,0]; %實(shí)驗(yàn)二指定的關(guān)節(jié)角 p=robot2.fkine(theta2) %fkine正解函數(shù),根據(jù)關(guān)節(jié)角theta,求解出末端位姿p q=ikine(robot2,p) %ikine逆解函數(shù),根據(jù)末端位姿p,求解出關(guān)節(jié)角q %% 2.3 jtraj 已知初始和終止的關(guān)節(jié)角度,利用五次多項(xiàng)式來(lái)規(guī)劃軌跡 % T1=transl(0.5,0,0); %根據(jù)給定起始點(diǎn),得到起始點(diǎn)位姿 % T2=transl(0,0.5,0); %根據(jù)給定終止點(diǎn),得到終止點(diǎn)位姿 T1=transl(0.5,0,0); %根據(jù)給定起始點(diǎn),得到起始點(diǎn)位姿 T2=transl(0,0.5,0); %根據(jù)給定終止點(diǎn),得到終止點(diǎn)位姿 init_ang=robot2.ikine(T1); %根據(jù)起始點(diǎn)位姿,得到起始點(diǎn)關(guān)節(jié)角 targ_ang=robot2.ikine(T2); %根據(jù)終止點(diǎn)位姿,得到終止點(diǎn)關(guān)節(jié)角 step = 20; f = 3 %軌跡規(guī)劃方法 figure(f) [q ,qd, qdd]=jtraj(init_ang,targ_ang,step); %五次多項(xiàng)式軌跡,得到關(guān)節(jié)角度,角速度,角加速度,50為采樣點(diǎn)個(gè)數(shù) grid on T=robot2.fkine(q); %根據(jù)插值,得到末端執(zhí)行器位姿 nT=T.T; plot3(squeeze(nT(1,4,:)),squeeze(nT(2,4,:)),squeeze(nT(3,4,:)));%輸出末端軌跡 title('輸出末端軌跡'); robot2.plot(q); %動(dòng)畫演示 %% 求解位置、速度、加速度變化曲線 f = 4 figure(f) subplot(3,2,[1,3]); %subplot 對(duì)畫面分區(qū) 三行兩列 占用1到3的位置 plot3(squeeze(nT(1,4,:)),squeeze(nT(2,4,:)),squeeze(nT(3,4,:)));%輸出末端軌跡 robot2.plot(q); %動(dòng)畫演示 figure(f) subplot(3, 2, 2); i = 1:6; plot(q(:,1)); title('位置'); grid on; figure(f) subplot(3, 2, 4); i = 1:6; plot(qd(:,1)); title('速度'); grid on; figure(f) subplot(3, 2, 6); i = 1:6; plot(qdd(:,1)); title('加速度'); grid on; t = robot2.fkine(q); %運(yùn)動(dòng)學(xué)正解 rpy=tr2rpy(t); %t中提取位置(xyz) figure(f) subplot(3,2,5); plot2(rpy); %% ctraj規(guī)劃軌跡 考慮末端執(zhí)行器在兩個(gè)笛卡爾位姿之間移動(dòng) f = 5 T0 = robot2.fkine(init_ang); %運(yùn)動(dòng)學(xué)正解 T1 = robot2.fkine(targ_ang); %運(yùn)動(dòng)學(xué)正解 Tc = ctraj(T0,T1,step); %得到每一步的T陣 tt = transl(Tc); figure(f) plot2(tt,'r'); title('直線軌跡');
審核編輯:湯梓紅
-
matlab
+關(guān)注
關(guān)注
188文章
2998瀏覽量
233355 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29533瀏覽量
211707 -
仿真
+關(guān)注
關(guān)注
51文章
4245瀏覽量
135364 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4372瀏覽量
64286 -
機(jī)械臂
+關(guān)注
關(guān)注
13文章
547瀏覽量
25244
原文標(biāo)題:基于MATLAB的關(guān)節(jié)型六軸機(jī)械臂軌跡規(guī)劃仿真
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
基于LabVIEW和SolidWorks改進(jìn)機(jī)械臂的設(shè)計(jì)流程
labview 上位機(jī) 六軸臂機(jī)械手
請(qǐng)問(wèn)水平兩軸機(jī)械臂如何控制軌跡
做畢設(shè),需要用2812控制由舵機(jī)組成的三關(guān)節(jié)機(jī)械臂,求助
通過(guò)ROS控制真實(shí)機(jī)械臂之延時(shí)時(shí)間精確控制
如何對(duì)機(jī)械臂的關(guān)節(jié)速度進(jìn)行動(dòng)態(tài)繪圖?
基于STC8H1K28雙軸機(jī)械臂驅(qū)動(dòng)模塊設(shè)計(jì)
雙機(jī)械臂運(yùn)動(dòng)軌跡優(yōu)化方法
使用SimMechanics實(shí)現(xiàn)六自由度的機(jī)械臂仿真研究
機(jī)械臂路徑規(guī)劃方案的簡(jiǎn)單介紹
機(jī)械臂:Arduino + Matlab

六自由度機(jī)械臂三次多項(xiàng)式插值法
六自由度機(jī)械臂軌跡規(guī)劃仿真





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論