") 淺析IMU中加速度計(jì)、陀螺儀、磁力計(jì)原理
淺析IMU中加速度計(jì)、陀螺儀、磁力計(jì)原理

IMU:Inertial Measurement Unit,即慣性測(cè)量單元。它是由三軸加速計(jì)、三軸陀螺儀、三軸磁力計(jì)等多種傳感器組成的模塊。
IMU在無(wú)人駕駛汽車(chē)、無(wú)人機(jī)上面應(yīng)用的比較多,包括手機(jī)等很多電子設(shè)備也有IMU傳感器的存在。
下面就來(lái)講講IMU中三軸加速計(jì)、三軸陀螺儀、三軸磁力計(jì)的工作原理。
1、三軸加速度計(jì)三軸加速度傳感器是基于加速度的基本原理去實(shí)現(xiàn)工作。
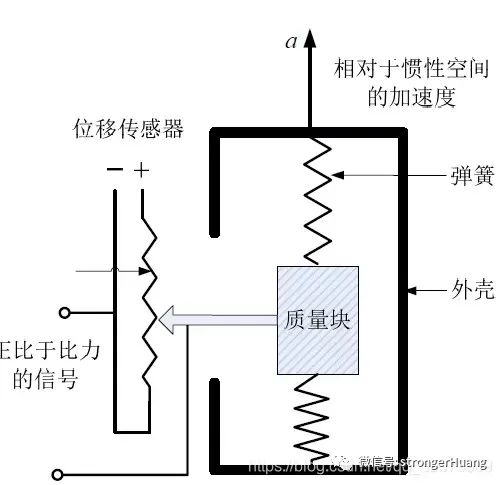
1.測(cè)量比力三軸加速度計(jì)是一種慣性傳感器,能夠測(cè)量物體的比力,即去掉重力后的整體加速度或者單位質(zhì)量上作用的非引力。當(dāng)加速度計(jì)保持靜止時(shí),加速度計(jì)能夠感知重力加速度,而整體加速度為零。在自由落體運(yùn)動(dòng)中,整體加速度就是重力加速度,但加速度計(jì)內(nèi)部處于失重狀態(tài),而此時(shí)三軸加速度計(jì)輸出為零。
2.測(cè)量角度

三軸加速度計(jì)的原理能夠用來(lái)測(cè)量角度。直觀地,如圖所示,彈簧壓縮量由加速度計(jì)與地面的角度決定。比力能夠通過(guò)彈簧壓縮長(zhǎng)度來(lái)測(cè)量。因此在沒(méi)有外力作用的情況下,加速度計(jì)能夠精確地測(cè)量俯仰角和滾轉(zhuǎn)角,且沒(méi)有累積誤差。

MEMS三軸加速度計(jì)是采用壓阻式、壓電式和電容式工作原理,產(chǎn)生的比力(壓力或者位移)分別正比于電阻、電壓和電容的變化。這些變化可以通過(guò)相應(yīng)的放大和濾波電路進(jìn)行采集。該傳感器的缺點(diǎn)是受振動(dòng)影響較大。
介于其測(cè)量角度的工作原理三軸加速度計(jì)無(wú)法測(cè)量偏航角:
可測(cè)量俯仰角和橫滾角:
2、三軸陀螺儀三軸陀螺儀是慣性導(dǎo)航系統(tǒng)的核心敏感器件,其測(cè)量精度直接影響慣導(dǎo)系統(tǒng)的姿態(tài)解算的準(zhǔn)確性。
作用:用于測(cè)量單元中的角速度及對(duì)角速度積分后角度的計(jì)算
原理:理解三軸陀螺儀的原理首先要知道科里奧利力
科里奧利力科里奧利力(Coriolis force)有些地方也稱(chēng)作哥里奧利力,簡(jiǎn)稱(chēng)為科氏力,是對(duì)旋轉(zhuǎn)體系中進(jìn)行直線運(yùn)動(dòng)的質(zhì)點(diǎn)由于慣性相對(duì)于旋轉(zhuǎn)體系產(chǎn)生的直線運(yùn)動(dòng)的偏移的一種描述。科里奧利力來(lái)自于物體運(yùn)動(dòng)所具有的慣性。---來(lái)自百度百科
當(dāng)一個(gè)質(zhì)點(diǎn)相對(duì)于慣性系做直線運(yùn)動(dòng)時(shí),因?yàn)橘|(zhì)點(diǎn)自身慣性,它相對(duì)于旋轉(zhuǎn)體系,其軌跡是一條曲線。立足于旋轉(zhuǎn)體系,我們認(rèn)為有一個(gè)力驅(qū)使質(zhì)點(diǎn)運(yùn)動(dòng)軌跡形成曲線。科氏力就是對(duì)這種偏移的一種描述,表示為:

即本來(lái)直線的運(yùn)動(dòng)當(dāng)放在一個(gè)旋轉(zhuǎn)體系中直線軌跡會(huì)發(fā)生偏移,而實(shí)際上并直線運(yùn)動(dòng)的問(wèn)題并未受到力的作用,設(shè)立這樣一個(gè)虛擬的力稱(chēng)為科里奧利力。

由此我們?cè)谕勇輧x中,選用兩塊物體,他們處于不斷的運(yùn)動(dòng)中,并令他們運(yùn)動(dòng)的相位相差-180度,即兩個(gè)質(zhì)量塊運(yùn)動(dòng)速度方向相反,而大小相同。它們產(chǎn)生的科氏力相反,從而壓迫兩塊對(duì)應(yīng)的電容板移動(dòng),產(chǎn)生電容差分變化。電容的變化正比于旋轉(zhuǎn)角速度。由電容即可得到旋轉(zhuǎn)角度變化。
3、三軸磁力計(jì)
磁力計(jì)能提供裝置在XYZ各軸所承受磁場(chǎng)的數(shù)據(jù),接著相關(guān)數(shù)據(jù)會(huì)匯入微控制器的運(yùn)算法,以提供磁北極相關(guān)的航向角,利用這些信息可偵測(cè)地理方位。
磁力儀是采用三個(gè)互相垂直的磁阻傳感器,每個(gè)軸向上的傳感器檢測(cè)在該方向上的地磁場(chǎng)強(qiáng)度。
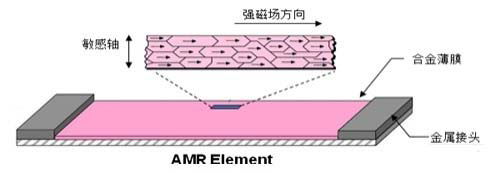
上圖為一種采用具有晶體結(jié)構(gòu)的合金材料。它們對(duì)外界的磁場(chǎng)很敏感,磁場(chǎng)的強(qiáng)弱變化會(huì)導(dǎo)致磁阻傳感器電阻值發(fā)生變化。

另外三軸磁力計(jì)還可以采用洛倫茲力原理,電流流過(guò)磁場(chǎng)產(chǎn)生力,從而驅(qū)動(dòng)電容等變化。
-
傳感器
+關(guān)注
關(guān)注
2565文章
52917瀏覽量
766651 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
231文章
10824瀏覽量
186571 -
IMU
+關(guān)注
關(guān)注
6文章
358瀏覽量
46691 -
無(wú)人駕駛汽車(chē)
+關(guān)注
關(guān)注
17文章
151瀏覽量
37897
發(fā)布評(píng)論請(qǐng)先 登錄
陀螺儀LSM6DSV16X與AI集成(11)----融合磁力計(jì)進(jìn)行姿態(tài)解算

使用飛思卡爾XS128,讀取MPU9250 9軸傳感器,加速度計(jì)和陀螺儀讀取正常,但是磁力計(jì)一直是0.求大神們幫忙
請(qǐng)問(wèn)有和ADIS16488性能差不多,包含加速度計(jì),陀螺儀,磁力計(jì),壓力計(jì),同時(shí)陀螺儀量程大于450dps的產(chǎn)品嗎?
請(qǐng)問(wèn)通常使用的磁力計(jì)、加速度計(jì)、陀螺儀等傳感器在安裝之前為什么要先校準(zhǔn)?
請(qǐng)問(wèn)為什么陀螺儀需校準(zhǔn)而加速度計(jì)不需?
介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法
介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法
加速度計(jì)和陀螺儀的參數(shù)意義

IMU中三軸加速計(jì)、陀螺儀和磁力計(jì)的工作原理
AN-688: iMEMS?加速度計(jì)和陀螺儀的相位與頻率響應(yīng)

三軸加速度計(jì)、陀螺儀和磁力計(jì)的應(yīng)用原理
十軸姿態(tài)傳感器模塊 | 集成加速度計(jì)、陀螺儀、磁力計(jì),自帶BLE5.0藍(lán)牙






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論