 水下機器人貨船排放水中油實時測變送器
水下機器人貨船排放水中油實時測變送器

傳統的河流、湖泊的水質監測工作,需要人工定期駕船采集,或建立水體檢測抄表站,成本高、效率低、實時性差。潛水俠針對該需求,為水務局、*等政府機構,提供基于物聯網的水質監測解決方案。
在安全方面,河流、海洋、湖泊水底是否有危險物物以及水質好壞情況的檢測也是水下機器人的一個工作,雖然這些任務*在水下完成,但對于一些水下的機器人來說,這并不是什么難題。任何作業都要保證安全*,所以在這方面的維護工作也變得非常重要。除了結構檢測,一些特殊的水下機器人還可以實現智能偵查和探測偵查。
水下機器人水質監測方案,這種特殊的方式同樣可以將優勢發揮在水下機器人身上。配備搭載水質監測傳感器,水下機器人可以準確地找到水下環境的污染源,從而進行數據傳遞,或直接代替人們進行水質監測。
具體實現上,需要在河流、湖泊以及重點排污點位布設多個通信浮標,每個通信浮標將檢測到的水質信息,通過衛星實時回傳至信息中心進行監測。
水下機器人貨船排放水中油實時測變送器
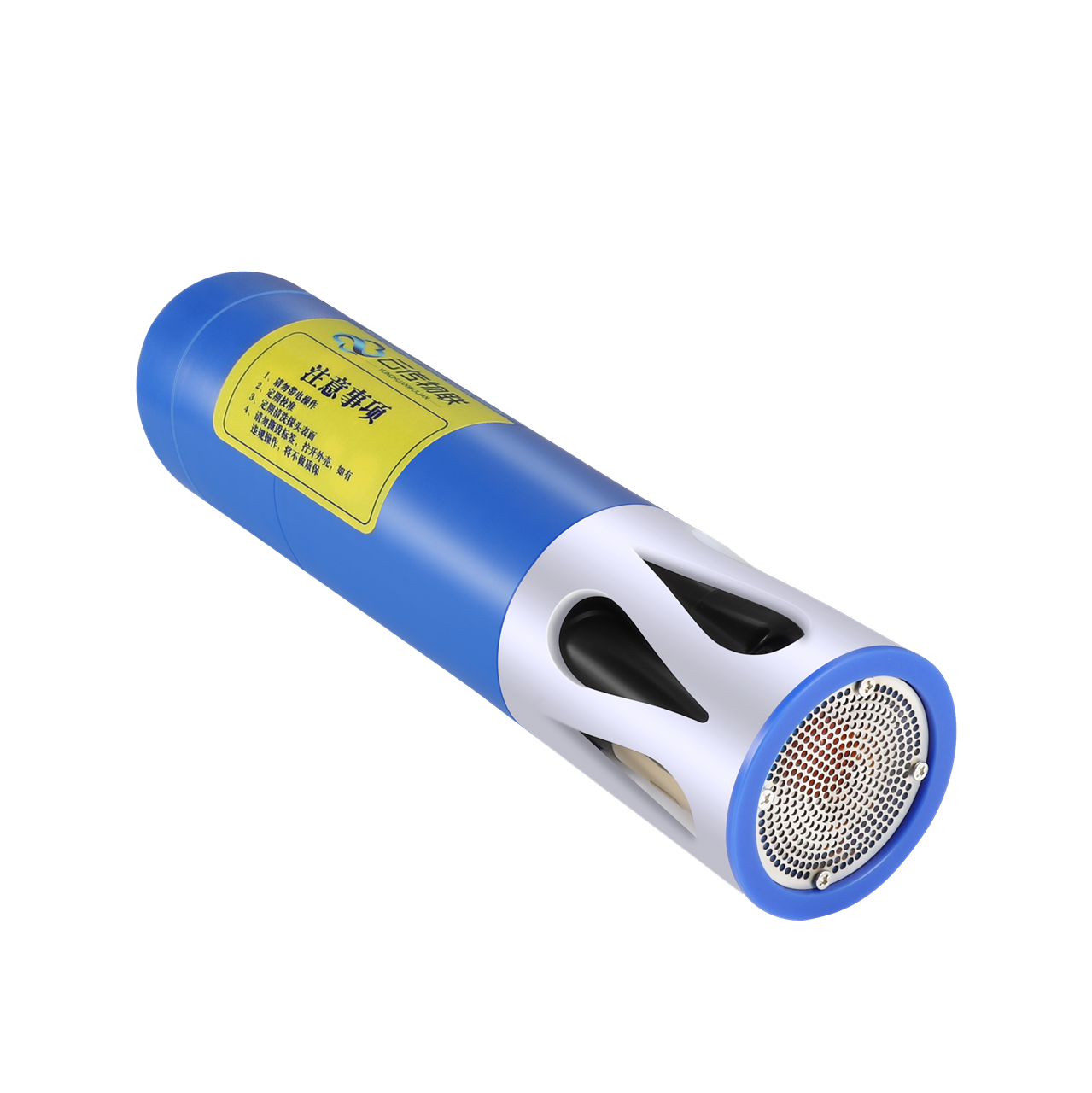
AMT-W400是一款采用RS-485通通訊接口和標準Modbus協議,可選自帶清洗刷的污泥濃度智能電極。使用波長860nm的紅外LED作光源,不受水樣色度影響,采用懸浮物45°散射方法,隨機附送數據分析軟件,具有校準、記錄、分析、診斷等功能。該電有自清洗、免維護護、抗*力強等優點。
廣泛應用于地表水、市政污水、工業廢水、污水處理、自來水廠、過程控制等領域。

特點
■ 具有自清洗功能,清除水樣中附著物
■ 數字調制濾波技術,消除環境光影響
■ 氣泡補償算法,降低水樣中氣泡干擾口
■ 長壽命紅外LED光源,長達10年以上
■ 耐腐蝕外殼,防水等等級1P68,可*水下工作
■ RS-485通訊接口,標準 Modbus協議,便于集成
■ 數據分析軟件,具有校準、記錄、分析、診斷功能
技術參數
| 檢測參數 | 污泥濃度(懸浮物SS) |
| 工作原理 | 雙光束散射法 |
| 發射波長 | 860nm |
| 測量范圍 | (0-25)g/L,可定義 |
| 分 辨 率 | 0.01g/L |
| 測量精度 | ±2%FS |
| 線性誤差 | <5% |
| 通訊接口 | RS-485,標準Modbus協議 |
| 尺寸規格 | D30mm,L185mm,電纜5m |
| 工作條件 | (-5-40)℃,(0-5)bar |
| 工作電壓 | 12V/24V DC |
審核編輯黃宇
-
機器人
+關注
關注
213文章
29691瀏覽量
212582 -
變送器
+關注
關注
14文章
1417瀏覽量
92335
發布評論請先 登錄
新品首發!電應普C01水聲通信模組發布,連接水下世界

超聲波水下測距換能器:探索水下世界的“千里眼”

明遠智睿SSD2351開發板:語音機器人領域的變革力量
盤點#機器人開發平臺
水下機器人搭載索尼FCB-EV9520L機芯:重塑深海探測的技術范式
索尼FCB模組賦能水下機器人:探索深海的“千里眼”
機器人如何實現移動功能
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
我國首臺公里級水下敷纜機器人完成測試
FCB-EV9520L,水下機器人應對光線變化的利器
高壓放大器在水下撲翼軟體機器人研究中的應用

創想智控激光焊縫跟蹤系統協同松下機器人自動焊接高機貼板的應用
凱茉銳電子 SONYFCB-EV7100模組在水下機器人中的創新應用






 工商網監
工商網監
評論