 Limap:基于3D line的重建算法
Limap:基于3D line的重建算法
主要內容:
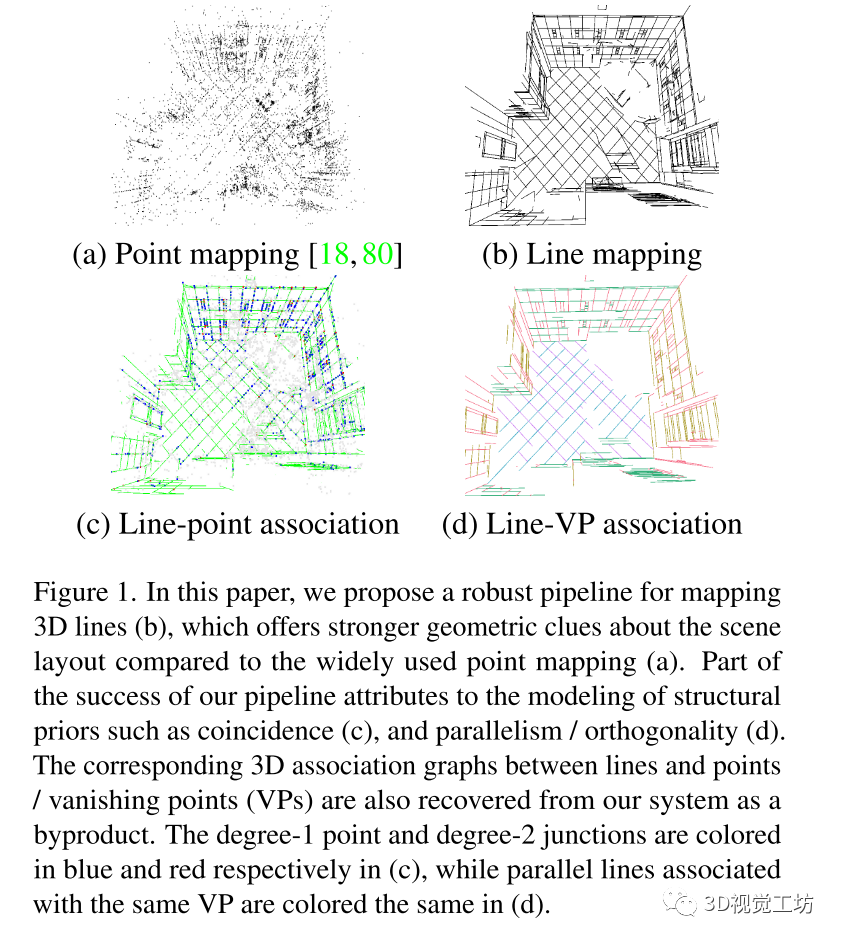
提出了一種基于線的重建算法,Limap,可以從多視圖圖像中構建3D線地圖,通過線三角化、精心設計的評分和track構建以及利用線的重合,平行性和正交性等結構先驗來實現的,可以與現有的基于點的SFM算法集成,并且可以利用其3D點來進一步改善線重建的結果。
構建的3D線地圖也開辟了新的研究方向,即基于線的視覺定位和BA,其中將線與點結合在一起會產生最佳結果。
代碼開源在https://github.com/cvg/limap.
點云地圖與線地圖:
目前通過SFM估計場景幾何結構和構建稀疏地圖主要是基于點的方法,即提取匹配圖像中的關鍵點,然后三角化,BA。
但是基于特征點構建點云地圖在沒有足夠穩定的關鍵點去檢測匹配的時候,比如室內場景,往往效果不好。但是這些場景基本都包含豐富的線條,例如在墻壁、窗戶、門或天花板,而且線往往表現出更高的定位精度,因為其像素的不確定性較小。線常常以高度結構化的模式出現,通常滿足場景范圍的幾何約束,例如共面性,重合 (線相交),平行和正交性。但是線也會遇到不同的問題,例如線端點定位不良和部分遮擋。然而,最近的線檢測器和匹配正在彌合點和線之間的性能差距,目前線圖構建的困難在于:
(1)線端點不一致:由于部分遮擋,線通常在圖像之間具有不一致的端點。
(2)線割裂:在每個圖像中,可能有多個線段屬于3D中的同一條線。與構建3D點track相比,創建線的track關聯的過程更加復雜。
(3)沒有兩視圖幾何驗證:點匹配可以通過極幾何在兩個視圖中驗證,但線至少需要三個視圖來過濾
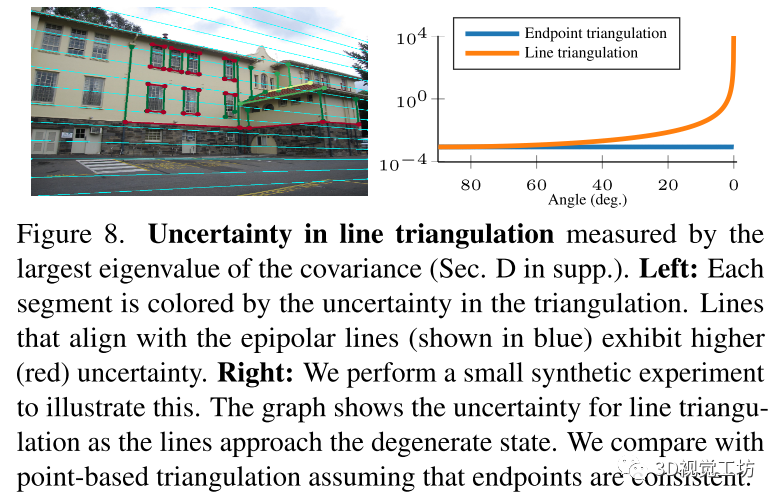
(4)退化:在實踐中,線三角化更傾向于不穩定的配置 (參見圖8),例如每當線與相機運動平行時,線三角化會退化。
(5)較弱的基于描述子的匹配:線段的最新描述子遠遠落后于基于點的描述子,因此在重建過程中更加強調幾何驗證和過濾。
為此,本篇文章旨在減少基于點的建圖解決方案和基于線的建圖解決方案之間的差距
Contributions:
(1)構建了一個新的線建圖系統,該系統可以從多視圖RGB圖像中可靠地重建3D線段。與以前的方法相比,構建的線圖更完整、更準確
(2)通過自動識別和利用結構先驗 (例如線重合和平行) 來實現這一目標。技術貢獻涵蓋了線圖的所有階段,包括線三角化,評分,track構建和聯合優化。
(3)該框架是靈活的,因此研究人員可以輕松地更改組件 (例如檢測器,匹配器,消失點估計器等) 或集成其他傳感器數據 (例如深度圖或其他3D信息)
(4)通過對合成和真實數據集進行定量評估來對性能進行基準測試,每個場景都有數百張圖像,其中LIMAP始終顯著優于現有方法
(5)通過在諸如視覺定位和SFM中的BA之類的任務中比純基于點的方法有所改進,來證明強大的線圖的有用性。
Pipeline:
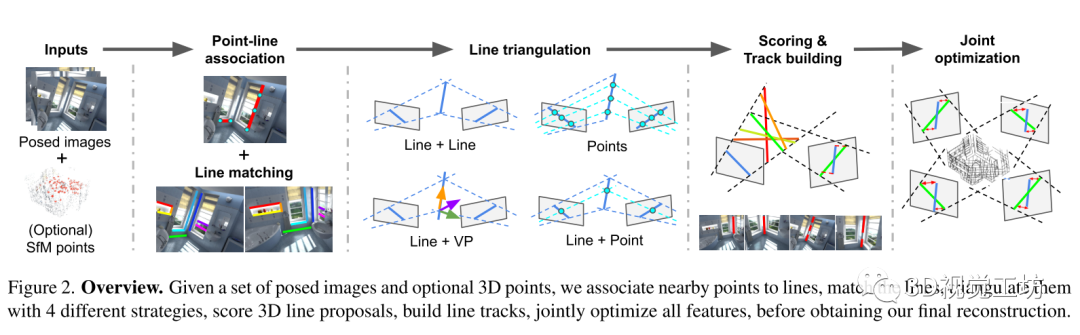
輸入:圖像,還可以額外添加點云模型。假設每個圖像的相機姿勢是可用的 (例如,來自SfM/SLAM)。
算法包括三個主要步驟:
(1)假設生成: 對于每個2D線段,生成一組3D線假設。
(2)假設評分和track關聯: 考慮到多視圖一致性對每個假設進行評分,為每個2D線選擇最佳候選,并將它們關聯到一組3D線track中。
(3)聯合優化: 與3D點和VP(消失點)方向一起在3D線track上共同執行非線性細化,將附加的結構先驗集成為軟約束。
論文技術點:
生成三維線假設:
為每個2D線段生成一組3D線假設,給定圖像中的一個線段,使用任何現有的線匹配算法來檢索n個最接近的圖像中的前K個線匹配。

λ1和 λ2是投影矩陣,讓所有假設的三維線的端點位于2D端點對應的相機光線上。
對于每個匹配的2D線段,通過代數線三角化生成一個假設。設 (Rm,tm) 為匹配視圖的相機姿態。然后線性求解端點射線深度 λ :


因為上面講了線三角化會出現退化,為了在退化的情況下獲得有意義的假設,利用來自點或相關消失點 (VPs) 的其他幾何信息,即2D-3D點對應關系,這可以來自基于點的SfM模型,也可以從匹配的端點進行三角化。對于每個2D線段,將一個像素閾值內的所有2D點關聯起來,從而與它們對應的3D點關聯起來。
借助相關的2D-3D點對應和消失點,為每個2D線段生成第二組假設
假設評分和軌跡關聯:
現在圖像I中的每個2D線段與每個相鄰圖像J的一組3D線假設相關聯。這部分要對這些假設進行評分并進行track關聯。
利用不同的評分方法來量化兩個3D線段 (L1,L2) 之間的距離。這個距離可以在三維或者二維進行度量。
距離度量:
有角距離(L1和L2之間的角度),
垂直距離(L1的端點到L2跨越最大正交距離)
透視距離: 假設L1和L2的端點在相同的光線上,該距離被定義為端點距離,如下圖所示。
利用2D和3D中的角距離,以及2D中的垂直距離,和透視距離。為了將它們聚合在一起,將尺度因子 τ 關聯到每個距離r,得到歸一化分數

用S表示所有相應的歸一化分數的集合,L1和L2之間的分數為:

現在有了每個線對的唯一分數,然后考慮來自相鄰圖像j和假設k的所有相鄰3D線候選。一致性分數是通過對每個圖像的最佳分數求和來定義的:

此時已為每個2D線段分配了唯一的3D線 (其最佳3D線候選)。然后目標是將這些2D線段集成到3D線track中。為此形成一個圖,其中2D線段是節點,所有初始線匹配都是邊,目標是修剪圖中的邊緣,以使連接的2D線段共享相似的3D線段。為此提出了兩種新的線評分措施,可以應對不同的端點配置和跨圖像的可變的尺度:
重疊分數:將L1正交投影到L2上,將投影的端點剪切到L2的端點 (如果它們落在L2之外) 以獲得線段 ,并將長度與閾值τ進行比較:
,并將長度與閾值τ進行比較:
內聯線段距離:L1的端點垂直地未投影到l2。如果它們落在L2之外,將它們剪切到L2的最接近端點。通過在兩個方向上執行此操作,可以定義兩個內點線段 (參見圖3(c)),并將InnerSeg距離定義為它們端點之間的最大距離。
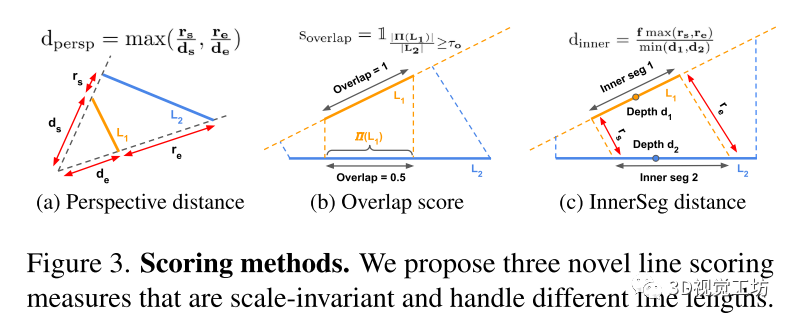
然后將以3D計算的InnerSeg距離轉換為上一段中的歸一化分數,并將其與2D和3D中的重疊分數以及使用 (5) 的先前分數相結合。
然后對于每個track重新估計單個3D線段。使用來自track中所有節點的3D分配的端點集,應用主成分分析 (PCA),并使用主特征向量和平均3D點來估計無限3D線。然后將所有端點投影在這條無限線上,以獲得新的3D端點。
線和點聯合優化:
使用其軌跡信息對獲取的3D線進行非線性細化。直接的方法是對重投影誤差進行幾何細化。有了2D點線關聯,可以通過包含其他結構信息來制定聯合優化問題。最小化的能量可以寫如下:

分別是點優化項,線優化項,線和點聯合優化項。

eperp是垂直距離,Lk是3D線段的2D投影,lk是2D線段,w∠是1減去投影和觀測線之間的2D角度的余弦的指數。
實驗:
首先建立了一個評估基準來量化建圖的質量,由于沒有地面真相 (GT) 3D線,因此使用GT網格模型或點云評估3D線圖。使用以下指標:
τ (Rτ)處的長度召回 (以米為單位): 距GT模型 τ mm以內的線部分的長度總和。
τ (Pτ)處的inlier百分比: 距GT模型 τ mm以內的track的百分比。
平均支持: 所有線track上的圖像支持和2D線支持的平均數量。
將論文算法與兩種最先進的方法作為基線進行比較: L3D++和ELSR,使用兩個線檢測器: 傳統的LSD檢測器和基于學習的SOLD2。
對于ELSR,將輸入轉換為VisualSfM 格式,并使用來自作者的code(僅支持LSD)。
第一個評估是在Hypersim數據集的前八個場景上運行的,每個場景由100個圖像組成。
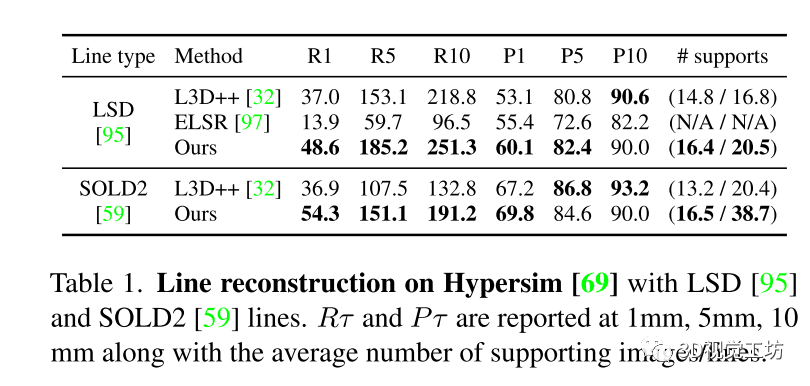
結果顯示比競爭對手更好或可比的精度的更完整的線圖,同時也顯示出明顯更高的track質量。
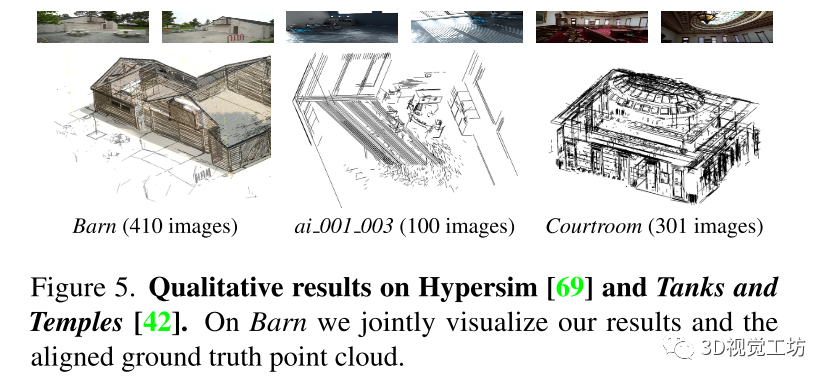
進一步評估了Tanks和Temples數據集的train部分。由于SOLD2是針對室內圖像進行訓練的,因此僅使用LSD。由于所提供的點云被清理為僅專注于主要目標,因此計算其邊界框,將其擴展1米,并且僅評估該區域內的線。這樣可以防止錯誤地懲罰遠離主場景的正確線條。
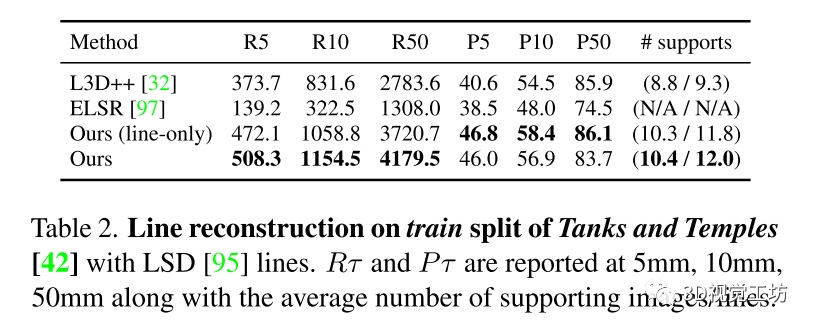
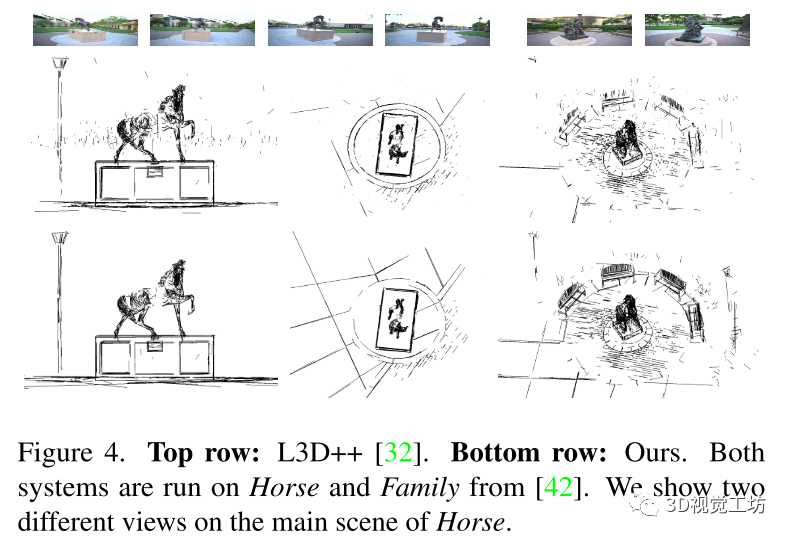
論文方法提高了地圖質量。圖4顯示了其方法和L3D++之間的定性比較。結果顯示出更好的完整性,也具有更少的嘈雜的線條,并實現了對細微細節 (例如在地面上) 的更強大的重建。
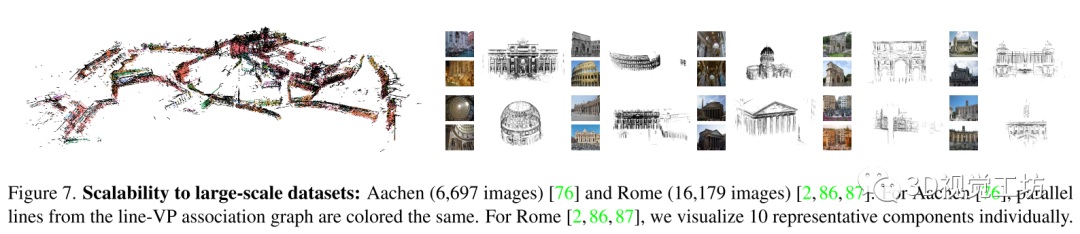
為了演示所提出的系統的可伸縮性,還在兩個大規模數據集上運行其方法: Aachen (6,697圖像)和Rome city (16,179圖像) 。圖7顯示了其方法產生具有清晰結構的可靠線圖。
為了證明構建的線圖對其他應用有效果,比如視覺定位和原本的點云模型的細化等方面,進行了一些實驗:
針對線輔助的視覺定位:在獲取的3D線圖之上構建了一個混合視覺定位,其點和線都具有。具體來說,首先使用提出的方法構建HLoc 中的點圖和線圖。然后分別匹配點和線從3D地圖中的軌跡信息獲取2D-3D對應關系。
鑒于這些對應關系,將四個最小求解器 : P3P,P2P1LL,P1P2LL,P3LL結合在一個具有局部優化的混合RANSAC框架中以獲得最終的6自由度姿勢。
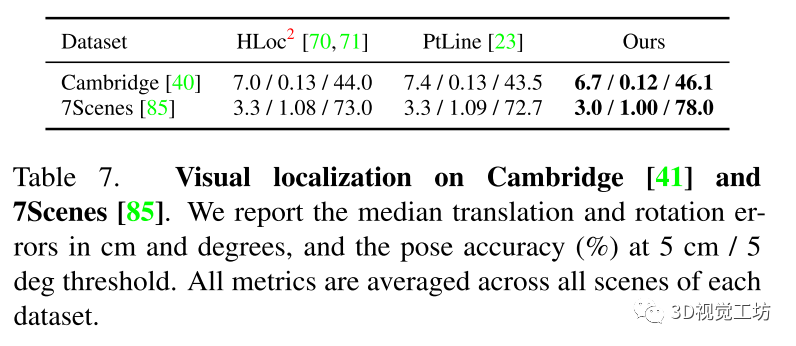
結果在表7,證明了線輔助的定位在室內和室外均比單獨的基線獲得了更好的結果,從而驗證了采用3D線圖進行視覺定位的有效性。
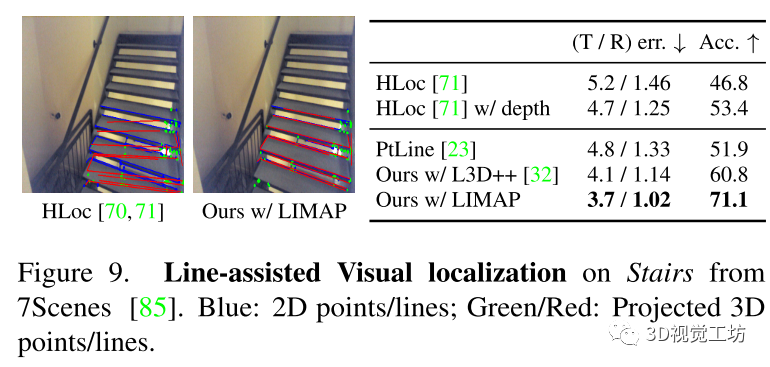
在圖9中,顯示了來自7 Scenes的樓梯場景的更詳細的結果,因為它是最具挑戰性的場景之一。線顯著地有利于重新投影結構的對準,從46.8提高到71.1的姿態精度。
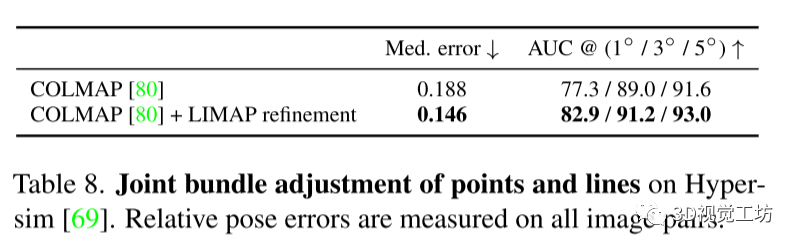
細化SFM點云:通過從大致正確的基于點的SFM (例如COLMAP) 構建的3D線圖,可以使用3D線及其軌跡信息,通過點與線的聯合優化來優化輸入的相機姿勢。為了驗證這一點,在Hypersim的前八個場景上運行COLMAP,在其之后構建線地圖,并執行聯合BA以優化姿態和內參。
審核編輯 :李倩
-
3D
+關注
關注
9文章
2953瀏覽量
109863 -
算法
+關注
關注
23文章
4701瀏覽量
94843 -
點云
+關注
關注
0文章
58瀏覽量
3931
原文標題:CVPR 2023|Limap:基于3D line的重建算法
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于ToF的3D活體檢測算法研究
PYNQ框架下如何快速完成3D數據重建
3D分組密碼算法
基于改進迭代收縮閾值算法的微觀3D重建方法
創想三維:3D掃描儀在3D打印機上的運用
阿里3D AI技術已成功應用諸多場景中,可迅速批量生產高質量3D模型
阿里研發全新3D AI算法,2D圖片搜出3D模型
探討關于3D視覺技術和3D傳感器
音圈模組3D打印助力肌腱和韌帶重建
大規模3D重建的Power Bundle Adjustment
基于未知物體進行6D追蹤和3D重建的方法
使用Python從2D圖像進行3D重建過程詳解






 工商網監
工商網監
評論