") 機(jī)器人手眼標(biāo)定的推導(dǎo)過(guò)程
機(jī)器人手眼標(biāo)定的推導(dǎo)過(guò)程
本文解決的問(wèn)題:
機(jī)械手搭載雙目相機(jī),手眼標(biāo)定。
本文有細(xì)致的推導(dǎo)過(guò)程,非常全面。
什么是手眼標(biāo)定
確定像素坐標(biāo)系和空間機(jī)械手坐標(biāo)系的坐標(biāo)轉(zhuǎn)化關(guān)系;
為什么會(huì)存在這個(gè)?
舉一個(gè)生活中常見(jiàn)的例子——用手移動(dòng)物體:
第一步:眼睛觀察到三維世界,并將其轉(zhuǎn)換到視網(wǎng)膜平面(三維空間轉(zhuǎn)換到二維平面)傳送信息給大腦;
第二步:大腦想要移動(dòng)某個(gè)物體,假設(shè)想要將物體從A點(diǎn)移動(dòng)B點(diǎn)(二維坐標(biāo)),但是物體是三維空間中的物體,是三維坐標(biāo),需要將二維坐標(biāo)換算成三維坐標(biāo);
第三步:大腦已經(jīng)獲得A點(diǎn)和B點(diǎn)的三維坐標(biāo),大腦給手(執(zhí)行機(jī)構(gòu))發(fā)出指令去完成這個(gè)任務(wù);
其中第二步就是手眼標(biāo)定,得到二維坐標(biāo)(像素坐標(biāo))到三維坐標(biāo)的轉(zhuǎn)換矩陣
在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過(guò)標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指定位置。這個(gè)過(guò)程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動(dòng)學(xué)正逆解,手眼標(biāo)定等。
相機(jī)的裝載位置
不在手上(eye-to-hand)
相機(jī)固定在一個(gè)地方,機(jī)械手的運(yùn)動(dòng)不會(huì)帶著相機(jī)一起移動(dòng)。
在手上(eye-in-hand)
相機(jī)安裝在機(jī)械手上,隨著機(jī)械手一起移動(dòng)。較為常用。這個(gè)實(shí)際上和eye-to-hand類似。
可以快速有效地標(biāo)定被測(cè)物體的坐標(biāo)。
這種情況的標(biāo)定過(guò)程實(shí)際上和相機(jī)和機(jī)械手分離的標(biāo)定方法是一樣的,因?yàn)橄鄼C(jī)拍照時(shí),機(jī)械手會(huì)運(yùn)動(dòng)到相機(jī)標(biāo)定的時(shí)候的位置,然后相機(jī)拍照,得到目標(biāo)的坐標(biāo),再控制機(jī)械手,所以簡(jiǎn)單的相機(jī)固定在末端的手眼系統(tǒng)很多都是采用這種方法,標(biāo)定的過(guò)程和手眼分離系統(tǒng)的標(biāo)定是可以相同對(duì)待的。
●基于圖像的視覺(jué)控制
●基于位置的視覺(jué)控制
●結(jié)合兩者的混合視覺(jué)控制
在正式開(kāi)始講解之前,可以看一下:深入淺出地理解機(jī)器人手眼標(biāo)定
對(duì)手眼標(biāo)定有一個(gè)直觀的認(rèn)識(shí)。
正式開(kāi)始
本文的相機(jī)搭載方案是,hand-in-eye。移動(dòng)相機(jī),標(biāo)定求解過(guò)程
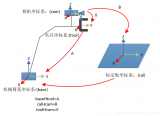
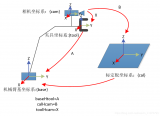
在推導(dǎo)過(guò)程中,我們會(huì)用到四個(gè)坐標(biāo)系,分別是:
●基礎(chǔ)坐標(biāo)系(用base表示)
●機(jī)械手坐標(biāo)系(用tool表示)
●相機(jī)坐標(biāo)系(用cam表示)
●標(biāo)定物坐標(biāo)系(用cal表示)
下面先給出示意圖:
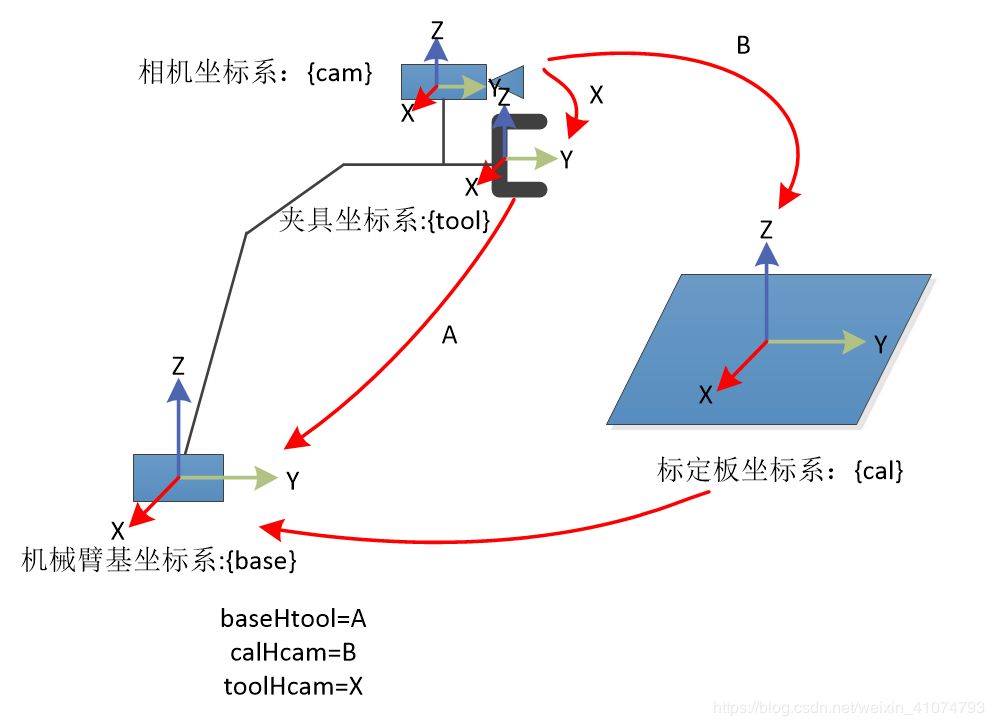
坐標(biāo)系之間的轉(zhuǎn)換關(guān)系說(shuō)明:
●baseHtool:表示機(jī)械手坐標(biāo)系到基礎(chǔ)坐標(biāo)系的轉(zhuǎn)換關(guān)系,可以由機(jī)器人系統(tǒng)中得出。(已知)
●toolHcam:表示相機(jī)坐標(biāo)系到機(jī)械手坐標(biāo)系的轉(zhuǎn)換關(guān)系;這個(gè)轉(zhuǎn)化關(guān)系在機(jī)械手移動(dòng)過(guò)程中是不變的;(未知,待求)
●calHcam:表示相機(jī)坐標(biāo)系到標(biāo)定板坐標(biāo)系的轉(zhuǎn)換關(guān)系(相機(jī)外參),可以由相機(jī)標(biāo)定求出;(相當(dāng)于已知)
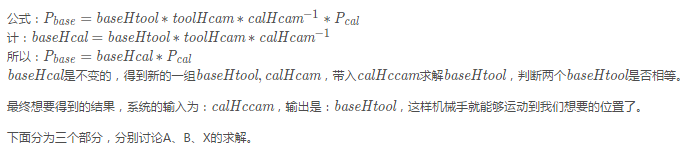
●baseHcal:表示標(biāo)定板坐標(biāo)系到基礎(chǔ)坐標(biāo)系的變換,這個(gè)是最終想要得到的結(jié)果;只要機(jī)械手和標(biāo)定板的相對(duì)位置不變,這個(gè)變換矩陣不發(fā)生變化。
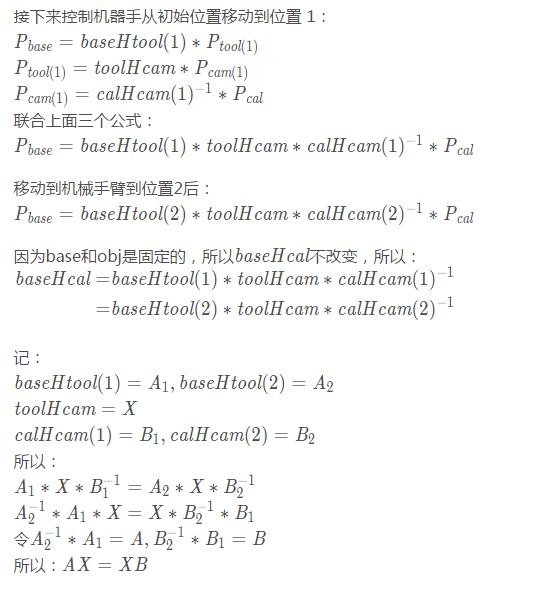
所以:其中的A已知,X待求,B需要通過(guò)相機(jī)標(biāo)定得知(張正友標(biāo)定法可以求得)。
驗(yàn)證結(jié)果
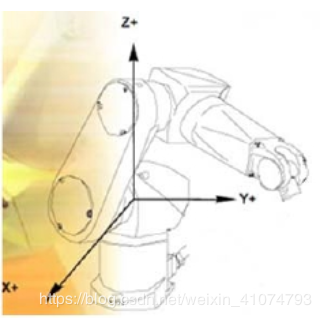
1. 基礎(chǔ)坐標(biāo)系(求解baseHtool)
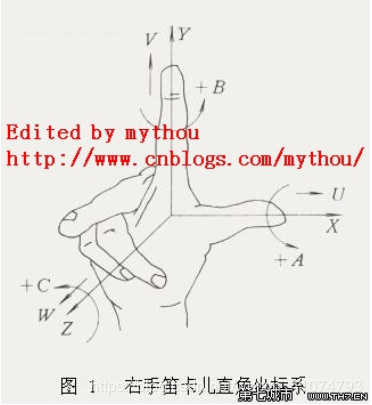
符合右手定則的XYZ三個(gè)坐標(biāo)軸
●原點(diǎn):機(jī)器人底座的中心點(diǎn)
●X軸正向:指向機(jī)器人的正前方
●Z軸正向:指向機(jī)器人的正上方
●Y軸正向:由右手定則確定
六個(gè)自由度
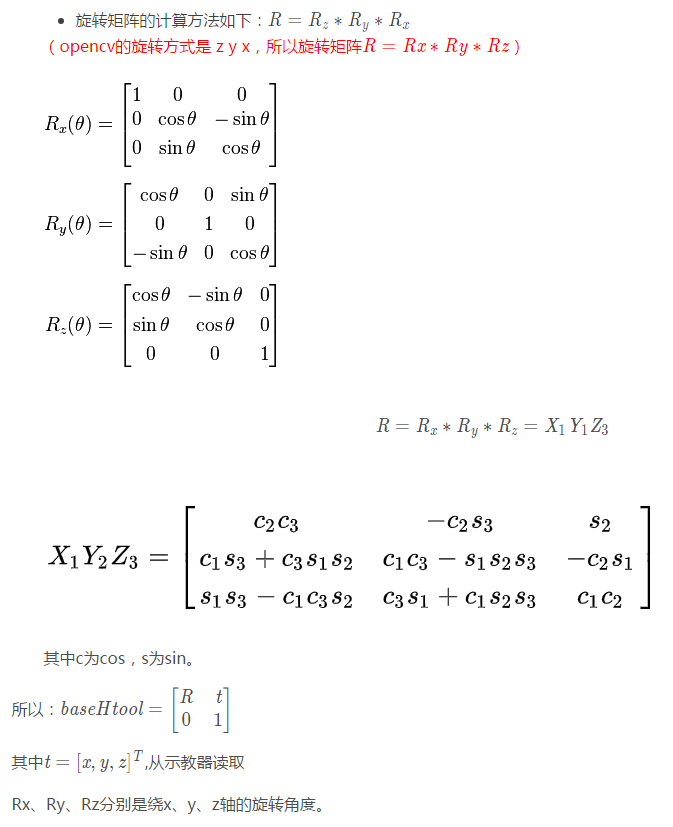
●三個(gè)位置:x、y、z(第六軸法蘭盤圓心相對(duì)于原點(diǎn)的偏移量)
●三個(gè)角:Rx、Ry、Rz(第六軸法蘭盤的軸線角度,由初始姿態(tài)即豎直向上繞x軸旋轉(zhuǎn)Rx度,再繞Y軸旋轉(zhuǎn)Ry度,再繞Z軸旋轉(zhuǎn)Rz度得到)
●旋轉(zhuǎn)方式(機(jī)器人RPY角和Euler角 – 基本公式)(機(jī)器人學(xué)-熊有倫36-40頁(yè))
●繞定軸X-Y-Z旋轉(zhuǎn)(判斷機(jī)械臂輸出四元數(shù)與代碼得到的四元數(shù)是否相等得到)
一定要注意歐拉角和李代數(shù)不一樣,非常容易搞混,因?yàn)樗麄兌际?個(gè)量
歐拉角:分別繞x、y、z軸旋轉(zhuǎn)的角度,不一樣的旋轉(zhuǎn)次序,得到的R不一樣;
李代數(shù):維度是3,是繞一個(gè)軸轉(zhuǎn)動(dòng)一定的角度。歐拉角可以理解成李代數(shù)在x、y、z軸上的分解旋轉(zhuǎn)。(不一定正確,不過(guò)比較形象)
注:不同機(jī)械臂示教器顯示的法蘭盤的數(shù)據(jù)格式不一樣,有的是用歐拉角顯示的,有的是用角軸顯示的。
2. camHcal相機(jī)到標(biāo)定板
●注意:標(biāo)定板坐標(biāo)系下的坐標(biāo)轉(zhuǎn)換到相機(jī)坐標(biāo)系下
思路大致如下:
●已知雙目相機(jī)的內(nèi)參、畸變系數(shù)、外參(Pr=R?Pl+t P_r=R*P_l+tP
r=R?P l +t),
●對(duì)左右相機(jī)的兩張圖片調(diào)用OpenCV中的findChessboardCorners函數(shù),找到內(nèi)角點(diǎn)(如果結(jié)果不好,繼續(xù)提取亞像素點(diǎn));
●將左右相機(jī)的像素點(diǎn)對(duì)應(yīng)起來(lái),得到匹配的2d點(diǎn);
●使用空間異面直線的方法,用對(duì)應(yīng)的2d點(diǎn)計(jì)算出以右相機(jī)為世界坐標(biāo)系的3維坐標(biāo)Pcam P_{cam}P cam ;(立體視覺(jué)匹配)
●計(jì)算出每個(gè)角點(diǎn)以棋盤格為世界坐標(biāo)的3維坐標(biāo)Pcal P_{cal}P cal;
●通過(guò)解方程Pcam=camHcal?Pcal P_{cam}=camHcal*P_{cal}P cam=camHcal?P cal 求解出外參(3d-3d:ICP,SVD奇異值分解(十四講173頁(yè)))
張正友相機(jī)標(biāo)定Opencv實(shí)現(xiàn)

參數(shù)解釋:
●第一個(gè)參數(shù)Image,傳入拍攝的棋盤圖Mat圖像,必須是8位的灰度或者彩色圖像;
●第二個(gè)參數(shù)patternSize,每個(gè)棋盤圖上內(nèi)角點(diǎn)的行列數(shù),一般情況下,行列數(shù)不要相同,便于后續(xù)標(biāo)定程序識(shí)別標(biāo)定板的方向;
●第三個(gè)參數(shù)corners,用于存儲(chǔ)檢測(cè)到的內(nèi)角點(diǎn)圖像坐標(biāo)位置,一般用元素是Point2f的向量來(lái)表示:vector image_points_buf;
●第四個(gè)參數(shù)flage:用于定義棋盤圖上內(nèi)角點(diǎn)查找的不同處理方式,有默認(rèn)值。
3. 求解AX=XB
以下四篇論文對(duì)應(yīng)著四種求解方法
Tsai, Roger Y., and Reimar K. Lenz. “A new technique for fully autonomous and efficient 3D robotics hand/eye calibration.” IEEE Transactions on robotics and automation 5.3 (1989): 345-358.(博客:Tsai-Lenz的OpenCV實(shí)現(xiàn))
Horaud, Radu, and Fadi Dornaika. “Hand-eye calibration.” The international journal of robotics research 14.3 (1995): 195-210.
Park, Frank C., and Bryan J. Martin. “Robot sensor calibration: solving AX= XB on the Euclidean group.” IEEE Transactions on Robotics and Automation10.5 (1994): 717-721.(博客:Navy的OpenCV實(shí)現(xiàn))
Daniilidis, Konstantinos. “Hand-eye calibration using dual quaternions.” The International Journal of Robotics Research 18.3 (1999): 286-298.
網(wǎng)上有源代碼可以下載:經(jīng)典手眼標(biāo)定算法C++代碼
文獻(xiàn)3采用的是李群的理論,將AX=XB轉(zhuǎn)化成最小二乘問(wèn)題;
文獻(xiàn)4采用的時(shí)對(duì)偶四元數(shù)的知識(shí),用對(duì)偶四元數(shù)表達(dá)旋轉(zhuǎn)和平移,從而進(jìn)行統(tǒng)一計(jì)算;
著四種算法精度差不多,不過(guò)文獻(xiàn)4的效果要更好點(diǎn)。
具體實(shí)現(xiàn)文獻(xiàn)3的算法,下面具體介紹
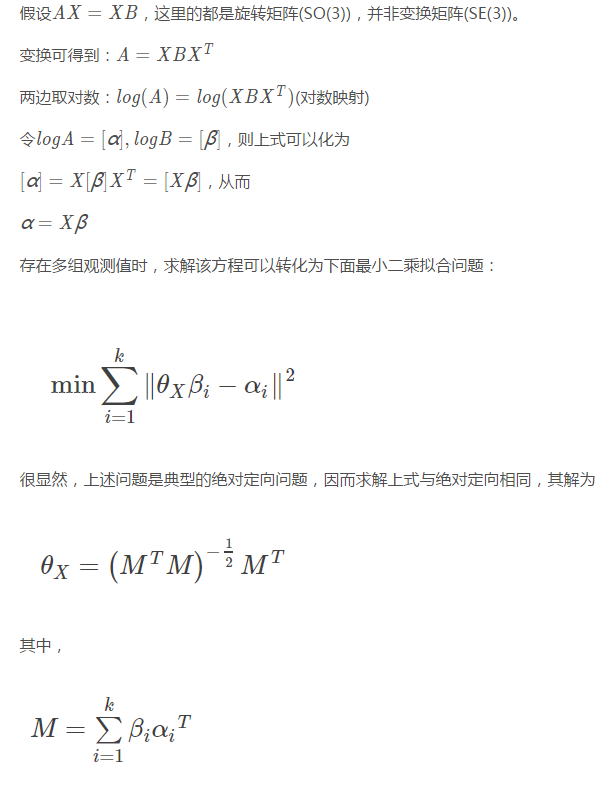
對(duì)數(shù):乘法變加法
李群李代數(shù)
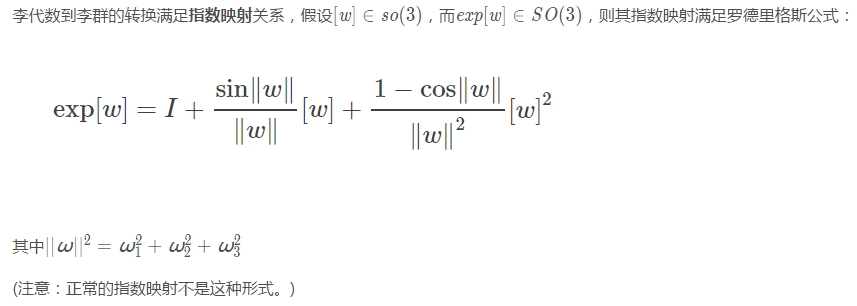
利用李群知識(shí)求解AX=XB
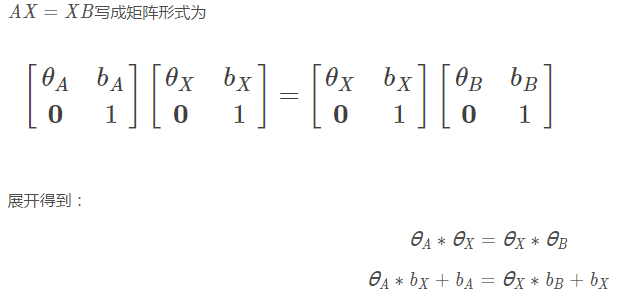
采用“兩步法”求解上述方程,先解算旋轉(zhuǎn)矩陣,再求得平移向量。
求解旋轉(zhuǎn)矩陣


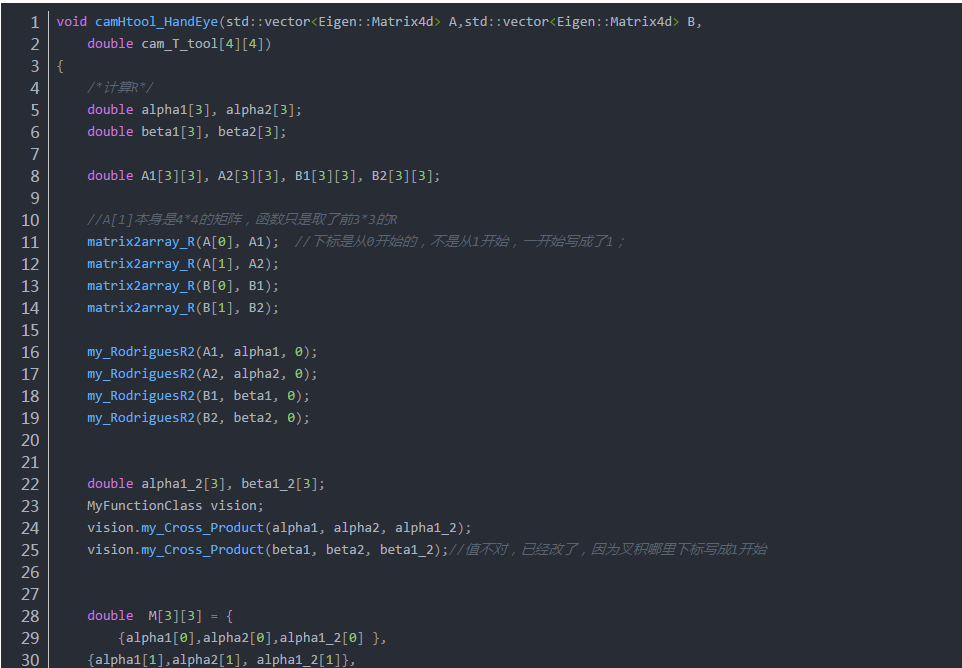
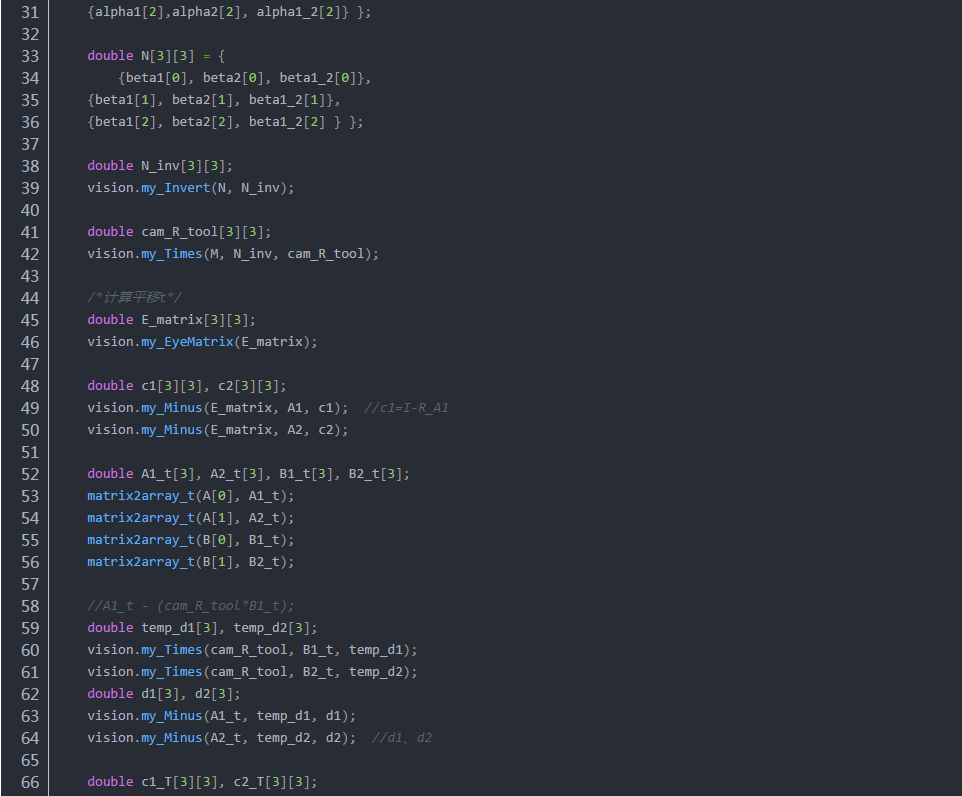
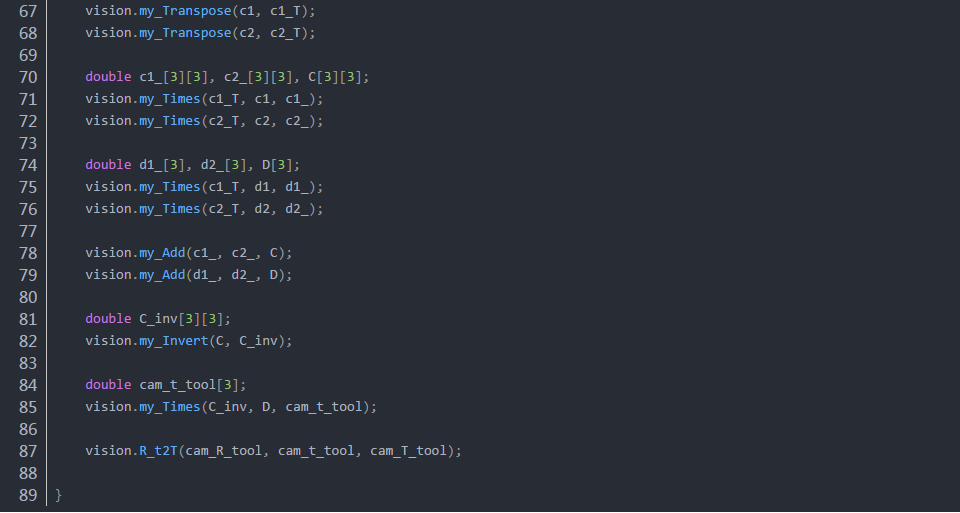
代碼:用兩組數(shù)據(jù)求解方程AX=XB
審核編輯:湯梓紅
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29533瀏覽量
211715 -
相機(jī)
+關(guān)注
關(guān)注
4文章
1442瀏覽量
54509 -
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7462 -
機(jī)械手
+關(guān)注
關(guān)注
7文章
344瀏覽量
30228 -
視覺(jué)控制
+關(guān)注
關(guān)注
0文章
8瀏覽量
6968
原文標(biāo)題:【光電智造】手眼標(biāo)定—全面細(xì)致的推導(dǎo)過(guò)程
文章出處:【微信號(hào):今日光電,微信公眾號(hào):今日光電】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
Realsense+大象機(jī)器人手眼標(biāo)定方案詳解

詳解機(jī)器人手眼標(biāo)定MATLAB及C++實(shí)現(xiàn)
機(jī)器視覺(jué)手眼標(biāo)定
NI VISION 與機(jī)器人做引導(dǎo)
請(qǐng)問(wèn)各位高手,如何用labview的vision實(shí)現(xiàn)手眼標(biāo)定
CMAC網(wǎng)絡(luò)在機(jī)器人手眼系統(tǒng)位置控制中的應(yīng)用
高級(jí)機(jī)器人手冊(cè)
凸松弛全局優(yōu)化機(jī)器人手眼標(biāo)定

手眼標(biāo)定_全面細(xì)致的推導(dǎo)過(guò)程
如何利用旋轉(zhuǎn)中心進(jìn)行手眼標(biāo)定呢?

常見(jiàn)的機(jī)器人視覺(jué)伺服中的標(biāo)定技術(shù)有哪些

機(jī)器人手眼標(biāo)定技術(shù)你真的懂嗎?
助力風(fēng)電行業(yè)!深視智能SR7400線激光以機(jī)器人手眼標(biāo)定實(shí)現(xiàn)風(fēng)力葉片切割引導(dǎo)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論