") 理想智能駕駛邁入3.0 時(shí)代
理想智能駕駛邁入3.0 時(shí)代

上海車展期間,理想汽車發(fā)布了最新的戰(zhàn)略計(jì)劃「雙能戰(zhàn)略」,而雙能戰(zhàn)略的核心有兩個(gè)方面:一,智能戰(zhàn)略;二,電能戰(zhàn)略。
這兩個(gè)戰(zhàn)略也很好理解,智能戰(zhàn)略包含智能駕駛和智能座艙,電能戰(zhàn)略則是圍繞增程電動(dòng)和純電展開。
01
理想智能駕駛邁入 3.0 時(shí)代
在智能駕駛方面,理想汽車始終堅(jiān)持全棧自研,今天,理想智能駕駛邁入3.0時(shí)代,從高速場景進(jìn)入到城市場景。
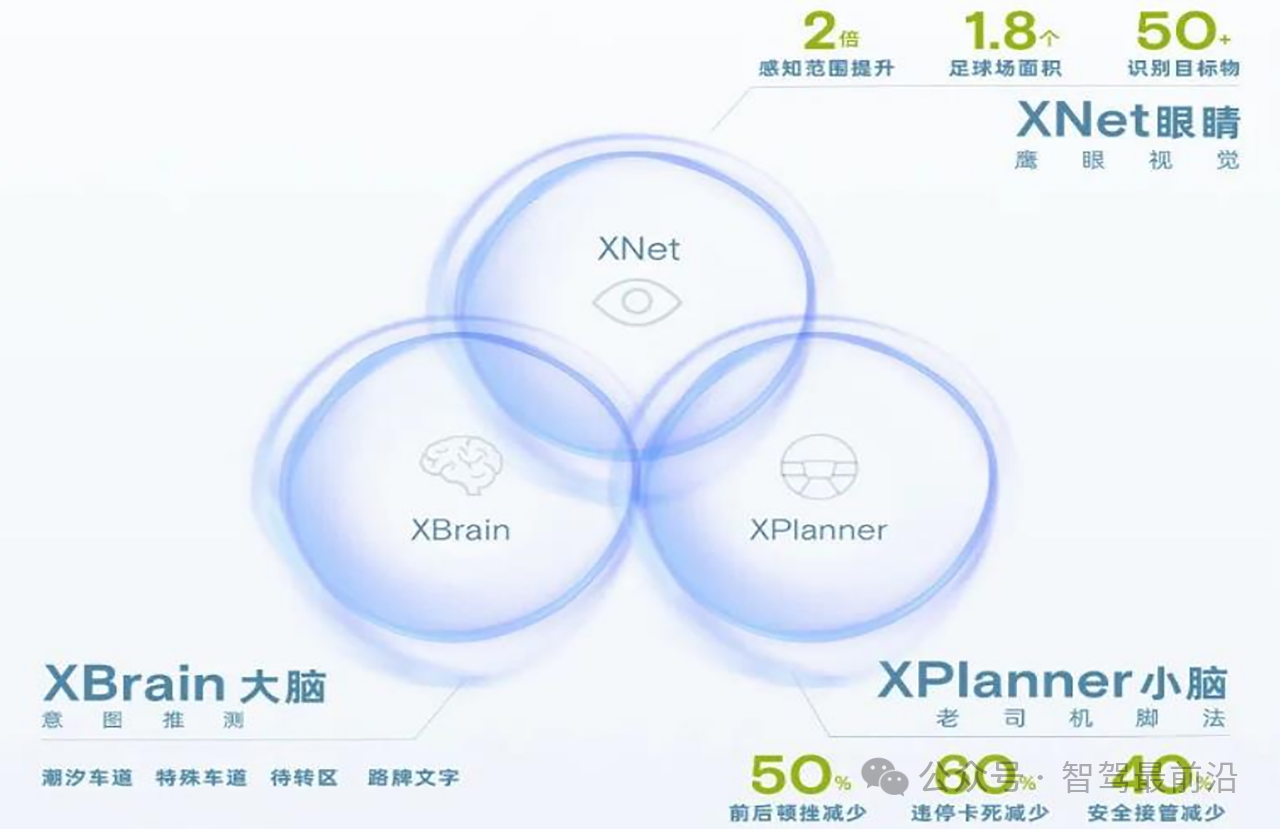
在預(yù)測及規(guī)劃中,通過實(shí)時(shí)輸出交通參與者未來的行動(dòng)軌跡,為決策規(guī)劃提供準(zhǔn)確信息。
理想在即將量產(chǎn)的城市 NOA 導(dǎo)航輔助駕駛算法中,使用了三種神經(jīng)網(wǎng)絡(luò)大模型算法:
靜態(tài) BEV 網(wǎng)絡(luò)算法
動(dòng)態(tài) BEV 網(wǎng)絡(luò)算法
Occupancy 網(wǎng)絡(luò)算法
對(duì)物理世界進(jìn)行還原,并使用 NeRF 技術(shù)增強(qiáng) Occupancy 網(wǎng)絡(luò)算法使之實(shí)現(xiàn)更高的精度和細(xì)節(jié)。
靜態(tài) BEV 可以在部分?jǐn)z像頭被遮擋,車道線模糊的時(shí)候依舊可以補(bǔ)充出道路結(jié)構(gòu),解決了高精地圖數(shù)據(jù)實(shí)時(shí)性的問題;動(dòng)態(tài) BEV 神經(jīng)網(wǎng)絡(luò)具備了一定的「腦補(bǔ)」能力,已經(jīng)與人類的思維方式高度接近。
比如當(dāng)車輛同時(shí)出現(xiàn)在多顆攝像頭視野內(nèi)時(shí),動(dòng)態(tài) BEV 可以穩(wěn)定地追蹤并感知出物體的距離與速度。
Occupancy 網(wǎng)絡(luò)算法,則可以對(duì)物理世界進(jìn)行數(shù)據(jù)化建模,通過純視覺可以還原物理世界的真實(shí)場景,例如路上的垃圾桶、臨時(shí)的施工牌等「通用障礙物」。
在這個(gè)基礎(chǔ)上,理想汽車使用 NeRF 技術(shù),進(jìn)一步提升了 Occupancy 在遠(yuǎn)距離的分辨率,讓系統(tǒng)的感知能力更加強(qiáng)大。
簡單說就是,基于以上三種神經(jīng)網(wǎng)絡(luò)大模型算法的感知結(jié)果,系統(tǒng)會(huì)實(shí)時(shí)輸出周圍所有交通參與者的軌跡預(yù)測結(jié)果,這樣的預(yù)測結(jié)果可以為理想汽車的智能駕駛系統(tǒng)在城市復(fù)雜場景的決策規(guī)劃提供準(zhǔn)確信息。
理想AD Max 3.0的城市NOA導(dǎo)航輔助駕駛系統(tǒng)二季度開始推送內(nèi)測用戶。到 2023 年年底,推送的國內(nèi)城市將超過 100 座,用一套技術(shù),完全打通城市與高速。
車展期間我們專訪了郎咸朋博士和趙哲倫,看看他們對(duì)理想自動(dòng)駕駛的一些介紹。
專訪:
理想汽車智能駕駛副總裁郎咸朋
理想汽車智能駕駛產(chǎn)品負(fù)責(zé)人趙哲倫
記者:您公布的關(guān)于自動(dòng)輔助駕駛最新技術(shù)大家都很震撼。我注意到您分享的 PPT 中有個(gè)數(shù)字:訓(xùn)練里程達(dá) 4 億公里以上,關(guān)于這部分是否可以分享一下理想汽車目前用于訓(xùn)練的超算中心的具體情況?
郎咸朋:我們的超算中心在默默的建立,我們之所以不對(duì)外講,是因?yàn)槲覀兿M行〇|西可以保密,但是我們的算力儲(chǔ)備,可以說是國內(nèi)第一的。
我們對(duì)超算中心的建設(shè)是堅(jiān)定的,大模型網(wǎng)絡(luò)必須要有算力儲(chǔ)備,我們會(huì)在合適的時(shí)間專門來說這件事。
記者:是理想汽車自己搭建的還是跟合作伙伴一起做的?
郎咸朋:這個(gè)我們都在考慮,我們之前用的是百度云和阿里云搭建的訓(xùn)練集群。
記者:我們現(xiàn)在整個(gè)網(wǎng)絡(luò)的進(jìn)度跟這些訓(xùn)練相關(guān)性是怎樣的?
郎咸朋:他們現(xiàn)在已經(jīng)完全滿足我們現(xiàn)在的訓(xùn)練要求,我們已經(jīng)有國內(nèi)第一能力的訓(xùn)練集群了。
記者:我聽說現(xiàn)在即使是 AD Pro 的方案,它回傳的圖像包括毫米波數(shù)據(jù)也可以加入到整個(gè)大模型的訓(xùn)練當(dāng)中,AD Max 車型也可以用是嗎?
郎咸朋:這是可以的。
如果再說的細(xì)節(jié)一點(diǎn),因?yàn)楝F(xiàn)在用大模型,它對(duì)數(shù)據(jù)樣本的精準(zhǔn)標(biāo)注這部分可以減少一定的要求。
像原來一般情況下做的數(shù)據(jù)訓(xùn)練,因?yàn)閿?shù)據(jù)量少所以需要對(duì)每張圖的標(biāo)注都精雕細(xì)琢。所以基于大量的數(shù)據(jù)樣本速度就會(huì)提升的非常快。
基于一個(gè)大模型做主干,加上幾個(gè)小的模型做微調(diào),會(huì)對(duì)整體能力起到非常好的效果,這其中一個(gè)大模型是關(guān)鍵。
舉個(gè)例子,這就像是我們考數(shù)學(xué),是需要多積累數(shù)學(xué)知識(shí)提升能力的,到了臨考試時(shí)再刷兩套真題,這樣的話我的考試成績就會(huì)非常好,但是你永遠(yuǎn)刷題,能力無法提升也不行。
記者:北京馬上要開始進(jìn)行「早鳥測試」,那針對(duì)普通用戶參與「早鳥測試」的規(guī)則已經(jīng)定好了么?
趙哲倫:這部分目前已經(jīng)有一些初步的計(jì)劃,基本上在前期我們還是會(huì)篩選之前在高速 NOA 場景下使用頻率相對(duì)高的,我們需要的客戶最核心的要素是確實(shí)喜歡使用智能駕駛功能,并且使用的頻率會(huì)比較高。
在前期對(duì)這套系統(tǒng)要有比較高的包容性和理解能力。
我們現(xiàn)在在云端做自動(dòng)化標(biāo)注,標(biāo)注效率很高,實(shí)際上靜態(tài) BEV 和動(dòng)態(tài) BEV 的結(jié)果超出我們的預(yù)期,對(duì)于下游規(guī)劃算法做的非常友好,這也是我們能把一切提前的核心原因,確實(shí)是效率會(huì)提高。
記者:您剛剛說的時(shí)候提到了基于視覺進(jìn)行智能駕駛輔助功能相關(guān)的部署研發(fā),昨天華為說的是基于感知,激光雷達(dá)長期來看是什么樣的地位?會(huì)是保底選擇還是參與很多核心的感知?
郎咸朋:我覺得分兩個(gè)問題回答:一個(gè)是對(duì)激光雷達(dá)的看法;一個(gè) Occupancy 占用網(wǎng)絡(luò)的問題。
先說一下 Occupancy 占用網(wǎng)絡(luò),現(xiàn)在做 Occupancy 樣本時(shí),我們會(huì)用到激光雷達(dá),它來給我們提供 4D 的樣本,這是 Occupancy 的輸入,也用了激光雷達(dá)。
在使用 Occupancy 占用網(wǎng)絡(luò)時(shí),我們希望它能做到純識(shí)別感知的能力,這是我們正在探索或正在做的。
對(duì)于激光雷達(dá)來說,一是激光雷達(dá)對(duì)夜間安全性是一個(gè)很好的補(bǔ)充,另外是對(duì)我們積累的樣本和數(shù)據(jù)是很好的傳感器。
趙哲倫:我補(bǔ)充一點(diǎn),當(dāng)車子開過去之后的后像場景,門關(guān)起來之后依然在變化,如果是前像的話,過去就沒了。
記者:我想問一下,未來幾年之內(nèi),有去掉激光雷達(dá)的計(jì)劃嗎?
郎咸朋:我們現(xiàn)在還在做測試,但現(xiàn)在不敢說去掉,還是要看研發(fā)的進(jìn)展和進(jìn)度。
記者:目前理想的車型上是否有搭載 4D 毫米波雷達(dá)?
郎咸朋:已經(jīng)搭載了,沒有對(duì)外因?yàn)槲覀冊(cè)谧?4D 毫米波雷達(dá)的驗(yàn)證,現(xiàn)在雖然是 4D 毫米波雷達(dá),但更多還是應(yīng)用于普通雷達(dá)的能力。
因?yàn)?4D 毫米波雷達(dá)比較新,我們需要更完整的驗(yàn)證之后,才能確定它的特點(diǎn)和特性是不是可以發(fā)揮出來像它說的那么好。
記者:目前 4D 毫米波雷達(dá)是搭載在哪些車型上?
郎咸朋:在理想 L7 Pro 車型上。
記者:我想問一下,咱們年底要開放 100 個(gè)城市的 NOA,在城市方面怎么做配合?還是說嘗試有些城市不做當(dāng)?shù)氐臏y試直接開放?怎么判斷普及策略?
郎咸朋:這是一個(gè)很好的問題,我們認(rèn)為要做就做第一。
第一,因?yàn)槔硐肫嚨某鞘?NOA 不依賴于高精地圖,從理論上來講只要有導(dǎo)航的地方,我們其實(shí)就可以覆蓋。所以哪怕 200 城、300 城也有可能。
第二,關(guān)于測試的部分,我們現(xiàn)在測試的手段還是拿自己的測試車去實(shí)驗(yàn),我們現(xiàn)在搭建的「波塞冬」訓(xùn)練平臺(tái),做影子測試驗(yàn)證的一些手段,可以幫我們進(jìn)行驗(yàn)證,而不是用自己的測試車去做驗(yàn)證,這個(gè)速度會(huì)非常快。
記者:現(xiàn)在的測試方式是不是一個(gè)城市當(dāng)中有足夠的車主數(shù)量并且有足夠高的 NOA 層級(jí),我們從理論上就可以認(rèn)為這個(gè)城市具備開放的條件?
郎咸朋:大的邏輯是這樣的,但是可能不用非開著輔助駕駛,人開著也是可以的。
因?yàn)楸澈笥杏白幽J竭@種機(jī)制。
趙哲倫:這將會(huì)非常高效的輔助我們?nèi)ラ_放城市 NOA,但實(shí)際上我們?cè)诋?dāng)?shù)剡€會(huì)做一些范化性的驗(yàn)證。
記者:因?yàn)槌鞘?NOA 的技術(shù)難度要比高速 NOA 會(huì)更大一點(diǎn),我個(gè)人感受理想在輔助駕駛方面相對(duì)比較保守。
理想的城市 NOA 還會(huì)和之前一樣保守嗎?
郎咸朋:我認(rèn)為保守和激進(jìn)應(yīng)該是在產(chǎn)品的表現(xiàn)和產(chǎn)品體驗(yàn)上的一些感受。
首先是要符合我們產(chǎn)品定義。
其次從技術(shù)上來說,我們?cè)诩夹g(shù)領(lǐng)域并不是保守派,大家也能看到我們?cè)谶^去五年默默積累的這些技術(shù)。
比如,從 BEV 網(wǎng)絡(luò)技術(shù)點(diǎn)上我們是領(lǐng)先的,至于產(chǎn)品策略表現(xiàn)什么形式,這和我們產(chǎn)品的功能設(shè)計(jì)相關(guān)。
趙哲倫:這確實(shí)是很難被理解的問題,因?yàn)閺奈覀兊谋S辛考?jí)別來說,AI 大部分就是招回率和準(zhǔn)確率的取舍。
如果我們變道策略做的非常激進(jìn),但因?yàn)槲覀冇脩袅考?jí)每天可以到幾十萬公里,在這樣的大用戶量級(jí)里,這個(gè)變道的風(fēng)險(xiǎn)率,不是說它會(huì)出事,但它的風(fēng)險(xiǎn)率一定會(huì)提升。
所以我們把變道整體的策略變得相對(duì)更保守,對(duì)整體安全性和穩(wěn)定性會(huì)更有幫助。
我們基于大用戶量級(jí)去考慮問題的時(shí)候,會(huì)考慮最極端的情況,但回到媒體端的測試,大家會(huì)覺得為什么你很保守?
因?yàn)榇蠹掖蟛糠秩粘J褂檬菦]有問題的,但在很極端的情況下,我們的策略會(huì)對(duì)整體系統(tǒng)的安全性有很大的幫助。
因?yàn)槲覀冋w還是希望能把這個(gè)東西做到標(biāo)配,做到更多用戶能使用,跟極客的策略還是不一樣的,所以我們整體上還會(huì)把它做到普通用戶也能使用和適應(yīng),能應(yīng)對(duì)更多的極端場景。
記者:那之后會(huì)不會(huì)有本地部署,學(xué)習(xí)性的?
趙哲倫:目前倒還沒有討論,目前還是做通用的「司機(jī)」。
記者:對(duì)于國外的道路功能會(huì)如何?比如說我買個(gè)車在國外開?
趙哲倫:目前從算法上完全沒有問題。但什么時(shí)候出海還是跟隨整體車型出海的計(jì)劃去定,算法上是沒有問題的。
記者:我覺得現(xiàn)在不夠熟悉智能駕駛的用戶,并不知道邊界和極限在哪里,特別是用戶量增大以后。我現(xiàn)在是根據(jù)經(jīng)驗(yàn)來去判斷該不該接管他,什么時(shí)候能夠放心?
趙哲倫:如果是可預(yù)期的風(fēng)險(xiǎn),內(nèi)部在做策略的話,規(guī)劃算法承接最后的整體控制。
在識(shí)別到橫向或縱向控制已經(jīng)難以確保安全性,比如意識(shí)到需要很大的力把方向拽回來,我們會(huì)提前向駕駛員預(yù)警,這種情況是有的。
包括有時(shí)他發(fā)現(xiàn)需要很強(qiáng)的急剎,但系統(tǒng)制動(dòng)力沒法達(dá)到及時(shí)性那么高的情況下,車輛就會(huì)提前預(yù)警。
總體來說,任何系統(tǒng)失常的情況,無論是縱向還是橫向,都會(huì)提前發(fā)出報(bào)警,因?yàn)槟阋呀?jīng)是老用戶了,其實(shí)你的預(yù)判比它會(huì)更早一些。
比方說你的預(yù)判是提前 3-4 秒會(huì)接管,但系統(tǒng)預(yù)判會(huì)是 1-2 秒時(shí)間,所以往往你會(huì)覺得車輛沒有提前告知。
記者:我每次看到彎道會(huì)提前把好,害怕車輛突然放開?
趙哲倫:你會(huì)發(fā)現(xiàn)到彎道,如果放開,一定會(huì)有很強(qiáng)的告警,這個(gè)我們是做了很強(qiáng)的邏輯。
記者:會(huì)不會(huì)考慮去放開一個(gè)層級(jí)?比如說對(duì)于熟悉用戶或者小白用戶自由選擇強(qiáng)度的問題?
趙哲倫:目前已經(jīng)在做策略了,最新的 OTA 4.4 會(huì)做一個(gè)邏輯,在設(shè)置上會(huì)找到提醒的簡潔模式和詳細(xì)模式,熟手用簡潔模式就可以了,出廠默認(rèn)會(huì)到詳細(xì)模式。
記者:硬件淘汰周期大概會(huì)有多久?2021 年的理想 ONE 我到現(xiàn)在都在開,智能輔助駕駛當(dāng)時(shí)用的時(shí)候還行,也在沒當(dāng)時(shí)體驗(yàn)好了,Max 硬件配置至少在多長區(qū)間能跟上你們的開發(fā)節(jié)奏?
郎咸朋:我們的開發(fā)節(jié)奏跟基礎(chǔ)演進(jìn)相關(guān)聯(lián)。
去年底出了 GPT,大模型就出來了,出來之后就要用這個(gè)技術(shù),匹配一定的算力,這就很難去評(píng)定我們是主動(dòng)還是被動(dòng)。
硬件研發(fā)和生產(chǎn)也是有周期的,我個(gè)人認(rèn)為這個(gè)周期三五年是要有的,最近這幾年發(fā)展比較快,我覺得硬件算力提升主要還是看軟件算法發(fā)展的快不快,如果發(fā)展的快,硬件肯定要跟著提升。
記者:我們?cè)谧鼍€下調(diào)研的時(shí)候發(fā)現(xiàn),媒體、廠商和用戶,對(duì)安全的定義不太一樣,我們會(huì)感覺只要?jiǎng)x住了,能夠避免危險(xiǎn)的情況出現(xiàn)就是安全了。但對(duì)于用戶來說可能覺得一腳急剎,就是不安全的。如果消除這點(diǎn)分歧的話,這個(gè)模塊,可能會(huì)更提前的去預(yù)知危險(xiǎn)的情況出現(xiàn),包括提前做出預(yù)警,這個(gè)大概有沒有一個(gè)周期說在哪個(gè)節(jié)點(diǎn)之前?
趙哲倫:這個(gè)其實(shí)就是郎博今天分享中的預(yù)測能力,預(yù)測也是非常難的,今天郎博分享的這些東西全部都是檢測到的物理世界,這些東西全部進(jìn)入到我們的大模型中會(huì)出一個(gè)預(yù)測結(jié)果,但這些預(yù)測結(jié)果到底準(zhǔn)確不準(zhǔn)確依賴于感知準(zhǔn)不準(zhǔn),感知不準(zhǔn)確預(yù)測結(jié)果就不準(zhǔn),感知準(zhǔn)確預(yù)測結(jié)果就會(huì)更準(zhǔn)。
這本身是個(gè)持續(xù)提升的過程。
郎咸朋:剛才提的我們要做到剛才的能力,除了檢測識(shí)別準(zhǔn)確之外,還有一個(gè)能力就是預(yù)判準(zhǔn)確,人其實(shí)是有預(yù)判,我這個(gè)系統(tǒng)會(huì)算算命,大概 4 秒鐘、5 秒鐘之后大家會(huì)是什么樣的狀態(tài)而且比較準(zhǔn)一點(diǎn)。
我要知道每一個(gè)動(dòng)態(tài)物體它過去、現(xiàn)在和未來的位置、速度,過去就是歷史的軌跡可以記錄,現(xiàn)在就靠當(dāng)前這一針的識(shí)別檢測,那么未來這幾秒鐘就是我剛才說的預(yù)測能力。
剛才說人的安全性、安全感,它就來自于一個(gè)預(yù)測能力,這樣預(yù)測的能力,剛才哲倫提到來自于感知能力的強(qiáng)依賴,今天主要分享的感知能力,動(dòng)態(tài)的,靜態(tài)的以及你不認(rèn)識(shí)的一些東西也做出來了,相當(dāng)于那地方有個(gè)黑乎乎的東西,雖然我不知道是什么,但我知道我不能壓上去或者直接開過去。
像這樣的一些東西,我都要把它全部實(shí)時(shí)的感知出來,并且有準(zhǔn)確的預(yù)測,這個(gè)預(yù)測你們也可以看,別的家都沒有放過預(yù)測的東西,很少或者沒有,我們把預(yù)測線都顯示出來了,這個(gè)視頻有機(jī)會(huì)可以發(fā)給大家。
其實(shí)每個(gè)物體包括行人、車輛、三輪車,它在未來幾秒鐘要去哪,軌跡怎么走,速度是什么樣的,在我們的大模型里都可以輸出出來,而這再進(jìn)一步就是,我能不能更好、更安全的做一些安全的東西,這就是我們產(chǎn)品力會(huì)慢慢的提升。但是,在時(shí)間點(diǎn)上,我們只能說盡快。
記者:昨天這個(gè)問題我也問過華為,他們說激光雷達(dá)是差不多,大家認(rèn)為是 2025 年就可以,但我感覺這個(gè)難度還是遠(yuǎn)超預(yù)期?
趙哲倫:這主要取決于一些場景,比如路口的掉頭特別是窄路,左邊車道的車會(huì)先向右邊打一把再轉(zhuǎn)向左邊,去進(jìn)行一個(gè)大掉頭,針對(duì)類似行為的預(yù)測就會(huì)比較困難,預(yù)測也分難易等級(jí),通常道路上大部分情況我們認(rèn)為比較快的都能達(dá)到。
但再往后可能用戶的行為或者他的行動(dòng)跟大量的數(shù)據(jù)是非預(yù)期的,這到后面比較長尾的問題就需要解決。
郎咸朋:預(yù)測還是非常難的,特別是一個(gè)人他向前加速突然又急剎車向后轉(zhuǎn),你完全無法預(yù)測 3 秒鐘或者 5 秒鐘之后是什么樣的,但我們只能說盡量的準(zhǔn)確預(yù)測。
同時(shí),我們盡量預(yù)測的快一點(diǎn),即使調(diào)整我們也可以實(shí)時(shí)跟著變,這兩個(gè)要素,一個(gè)要準(zhǔn)一個(gè)要快,都是我們要完成的。
記者:我們每進(jìn)入一個(gè)城市,有沒有它的硬性指標(biāo),比如說需要有多少輛高配車型,在一個(gè)城市內(nèi)跑多少公里,然后這個(gè)城市已經(jīng)決定開放了,目前這個(gè)可以公布嗎?
趙哲倫:開放的基本邏輯和順序和當(dāng)?shù)氐谋S辛肯嚓P(guān),100 多座城市覆蓋保有量已經(jīng) 90% 以上了。
郎咸朋:我們跟別人不一樣,別人是按照城市來開放,按照行政區(qū)劃分來開放,因?yàn)橐蕾囉诘貓D的開放。我們開放的邏輯是數(shù)據(jù)驅(qū)動(dòng)的邏輯,這個(gè)城市的車多、里程多,在里面測試的相對(duì)多一些,這個(gè)城市的數(shù)據(jù)量大、需求量大,那這個(gè)城市就更早的容易被開放出來,是這樣的邏輯。
記者:所以就核心標(biāo)準(zhǔn)是數(shù)據(jù),比如說一個(gè)城市大概積累多少數(shù)據(jù)?
趙哲倫:我們會(huì)評(píng)估當(dāng)?shù)赜脩粼趶?fù)雜路口的覆蓋率,因?yàn)閺?fù)雜路口的訓(xùn)練量級(jí)是比較重要的,數(shù)據(jù)的體量我們還是要稍微保密一下,后面有機(jī)會(huì)會(huì)同步給大家。
記者:現(xiàn)在對(duì)于變道超車邏輯看起來相對(duì)保守,這是因?yàn)榧彝ビ脩舻能囆投ㄎ贿€是大車應(yīng)該減少頻繁的操作?從尺寸角度來說,我們要跟其他車企做智能輔助駕駛區(qū)別開,另外還有分層的問題,我們以后會(huì)跟交付一樣單獨(dú)開通一個(gè)機(jī)器模式和標(biāo)準(zhǔn)模式嗎?到底是因?yàn)槎ㄎ粏栴}還是尺寸問題?
趙哲倫:首先是變道策略比較保守,在比較狹小的空間里或者說后車有比較高速的侵入趨勢時(shí),是不是能進(jìn)行變道?
這部分跟定位是有關(guān)系的,我們面對(duì)的用戶跟其他品牌有些不同,有大量的是比較普通的,甚至是從原來豪華車置換的用戶,本身甚至連 LCC 這樣的功能都沒使用過,所以用到 NOA 這樣的功能,我們希望整體上相對(duì)來說更偏向于安全,或者是保守一些,是這樣的策略。
另外,從車身尺寸的角度來說,我們?cè)谧鋈魏屋o助駕駛功能時(shí)都比其他車型困難一些。
舉個(gè)例子,比如特斯拉 Model3 感覺并不會(huì)很明顯,因?yàn)楸旧碥噷挶容^窄,但因?yàn)槲覀冘噷挾汲^兩米,車道中稍微有些靠左或右,用戶會(huì)非常敏感,這對(duì)整體算法的控制精準(zhǔn)度要求非常高。
目前可以看到對(duì)我們 L7、L8 和 L9 基本上具備這樣范化能力,包括后面會(huì)出相對(duì)更小的車型,我們都可以完全覆蓋,做完大的再做小的相對(duì)容易一些。
第三個(gè)是分層,目前其實(shí)前面說的我們?cè)诮桓哆壿嬌弦呀?jīng)在做這部分的考慮了,目前還沒做非常嚴(yán)格的,比如說你是新手就一定不能怎么用,這個(gè)目前還沒有做。
記者:比如說是否有激進(jìn)模式跟標(biāo)準(zhǔn)模式?
趙哲倫:這個(gè)會(huì)放在后面階段做個(gè)性化,我們認(rèn)為第一階段先用一個(gè)通用的,把用戶大部分的 80% 的需求滿足好,下階段才需要 20% 比方說有人有激進(jìn)有人有保守的需求。
審核編輯 :李倩
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4814瀏覽量
103568 -
智能駕駛
+關(guān)注
關(guān)注
4文章
2809瀏覽量
49947 -
智能座艙
+關(guān)注
關(guān)注
4文章
1130瀏覽量
16888
原文標(biāo)題:理想智能駕駛邁入 3.0 時(shí)代
文章出處:【微信號(hào):nev360,微信公眾號(hào):焉知新能源汽車】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
強(qiáng)強(qiáng)聯(lián)合再進(jìn)階!理想AD Pro輔助駕駛正式升級(jí)搭載地平線征程6M

理想汽車推出全新自動(dòng)駕駛架構(gòu)
理想汽車積極推動(dòng)智能駕駛高質(zhì)量發(fā)展
智能駕駛時(shí)代通過駕駛人數(shù)據(jù)模型降低交通事故保障生命安全
NimbleTrack 用戶體驗(yàn)共鳴,引領(lǐng)行業(yè)邁入智能全無線掃描時(shí)代
理想汽車智能駕駛團(tuán)隊(duì)調(diào)整:端到端部門獨(dú)立
智己汽車攜手Momenta聯(lián)合打造一段式端到端直覺式智駕大模型
智己汽車邁入“直覺”智駕新時(shí)代
智己汽車宣布IM AD 3.0實(shí)現(xiàn)"直覺"智駕新時(shí)代
從小鵬、理想、蔚來布局看自動(dòng)駕駛發(fā)展趨勢
傳理想汽車智能駕駛SoC芯片年底前完成流片
比亞迪方程豹與華為簽訂智能駕駛合作協(xié)議
智能駕駛時(shí)代下的EMC挑戰(zhàn)與防護(hù)策略
機(jī)器視覺 歡創(chuàng)播報(bào) 華為高階智能駕駛3.0版本8月上市






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論