") 3D深度機(jī)器視覺(jué)和機(jī)器臂的無(wú)序抓取
3D深度機(jī)器視覺(jué)和機(jī)器臂的無(wú)序抓取


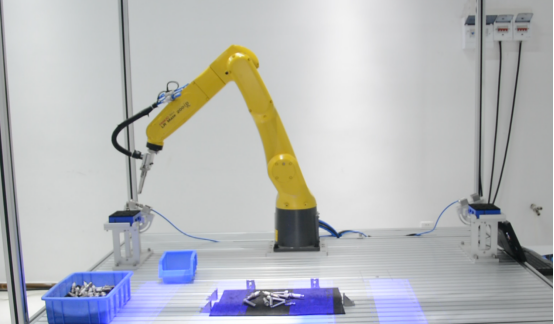
今天我記錄使用myCobot320 M5跟FS820-E1深度相機(jī)進(jìn)行一個(gè)無(wú)序抓取物體的分享。
為什么會(huì)選擇深度相機(jī)和機(jī)械臂做一個(gè)案例呢?
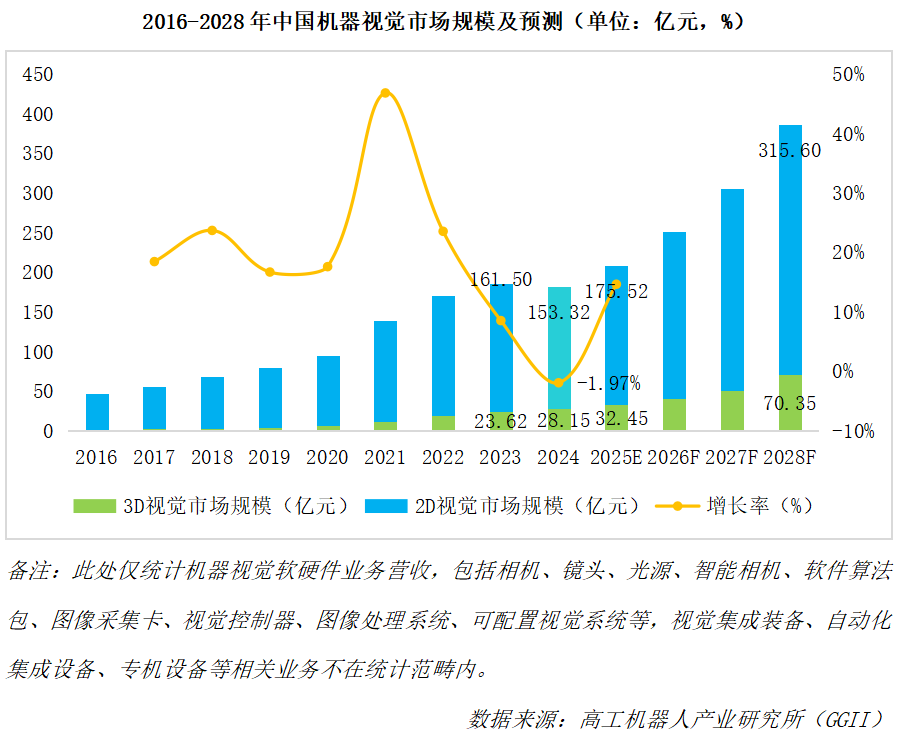
2D相機(jī)(最常見(jiàn)使用的相機(jī))可以捕捉二維圖像,也就是在水平和垂直方向上的像素值。它們通常用于拍攝靜態(tài)場(chǎng)景或移動(dòng)的物體,并且無(wú)法提供深度信息。在機(jī)器視覺(jué)應(yīng)用中,2D相機(jī)可以用于圖像分類、目標(biāo)檢測(cè)和識(shí)別等任務(wù)。
相比之下,深度相機(jī)可以捕捉深度信息,因此可以獲得物體的三維信息。這些相機(jī)使用各種技術(shù)來(lái)測(cè)量物體的深度,如結(jié)構(gòu)光、時(shí)間飛行和立體視覺(jué)等。在機(jī)器視覺(jué)應(yīng)用中,3D相機(jī)可以用于點(diǎn)云分割、物體識(shí)別和3D重建等任務(wù)。
2D相機(jī)捕獲到的信息已經(jīng)滿足不了一些特殊的情況,所以換上深度相機(jī)獲得的更多的信息,比如說(shuō)物體的長(zhǎng)寬高。
讓我們開(kāi)始今天的主題。
FS820-E1
相機(jī)的環(huán)境搭建
首先我要搭建FS820-E1的開(kāi)發(fā)環(huán)境,使用的是相機(jī)提供的RVS進(jìn)行開(kāi)發(fā)。可以利用RVS中的視覺(jué)算子寫(xiě)成節(jié)點(diǎn)(Node)快速搭建抓取功能。
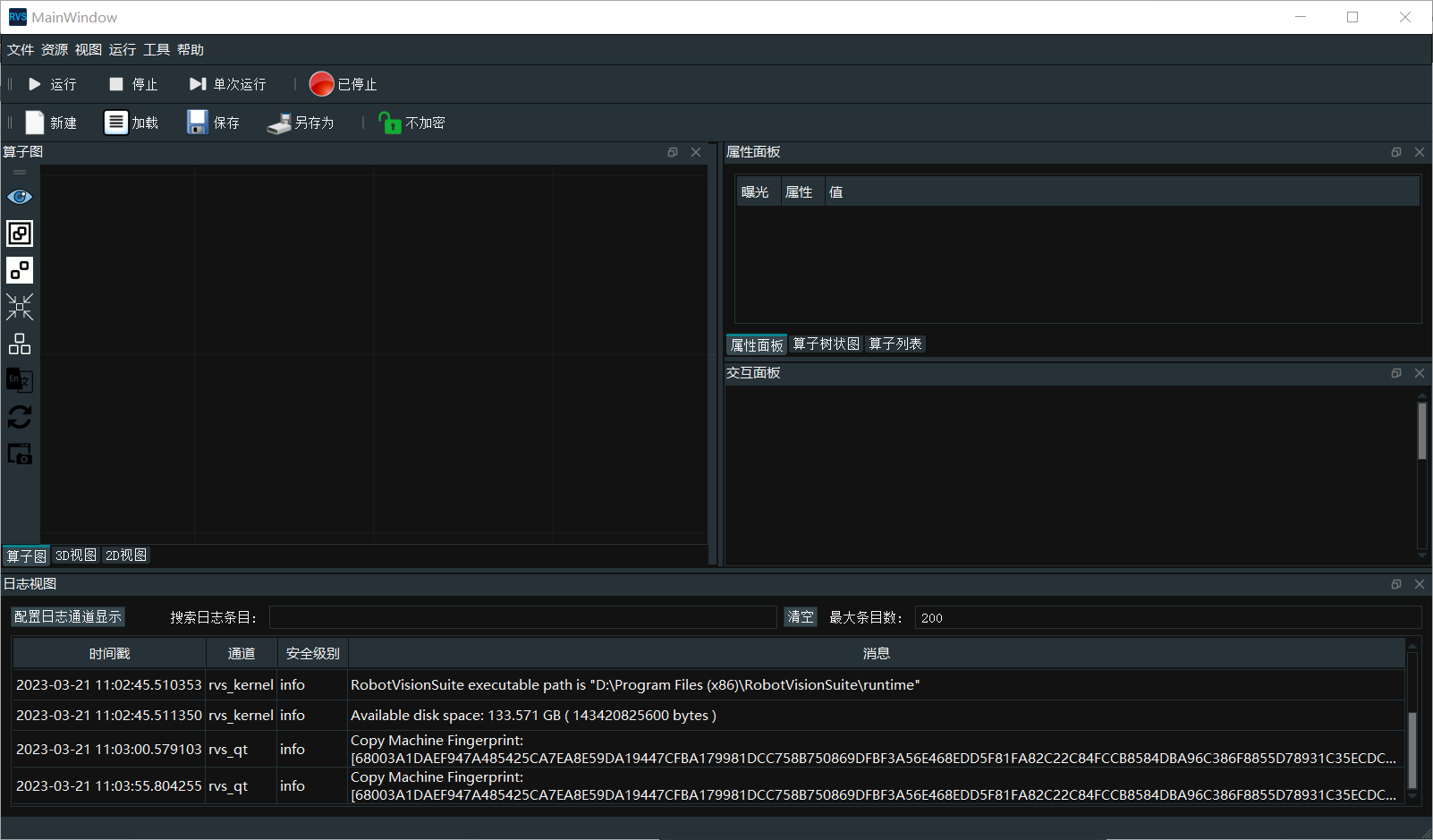
RVS工作界面
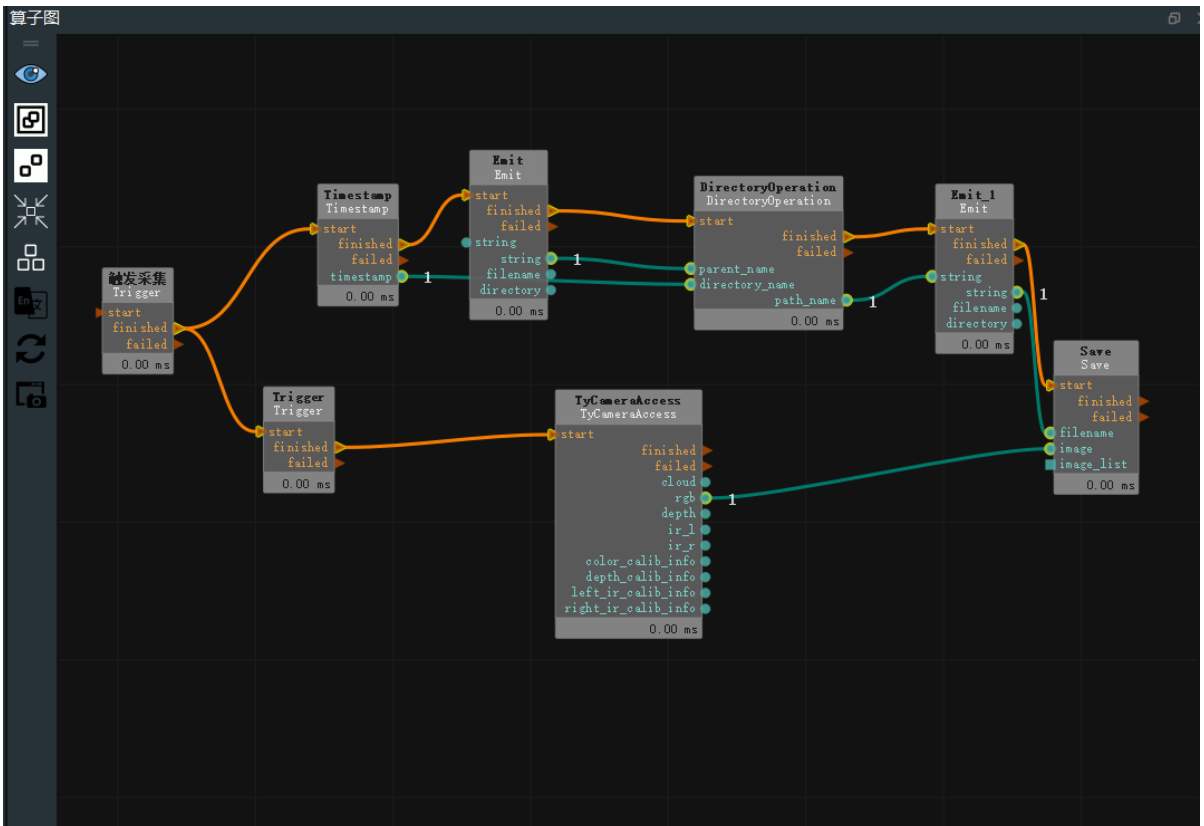
實(shí)時(shí)采集數(shù)據(jù)
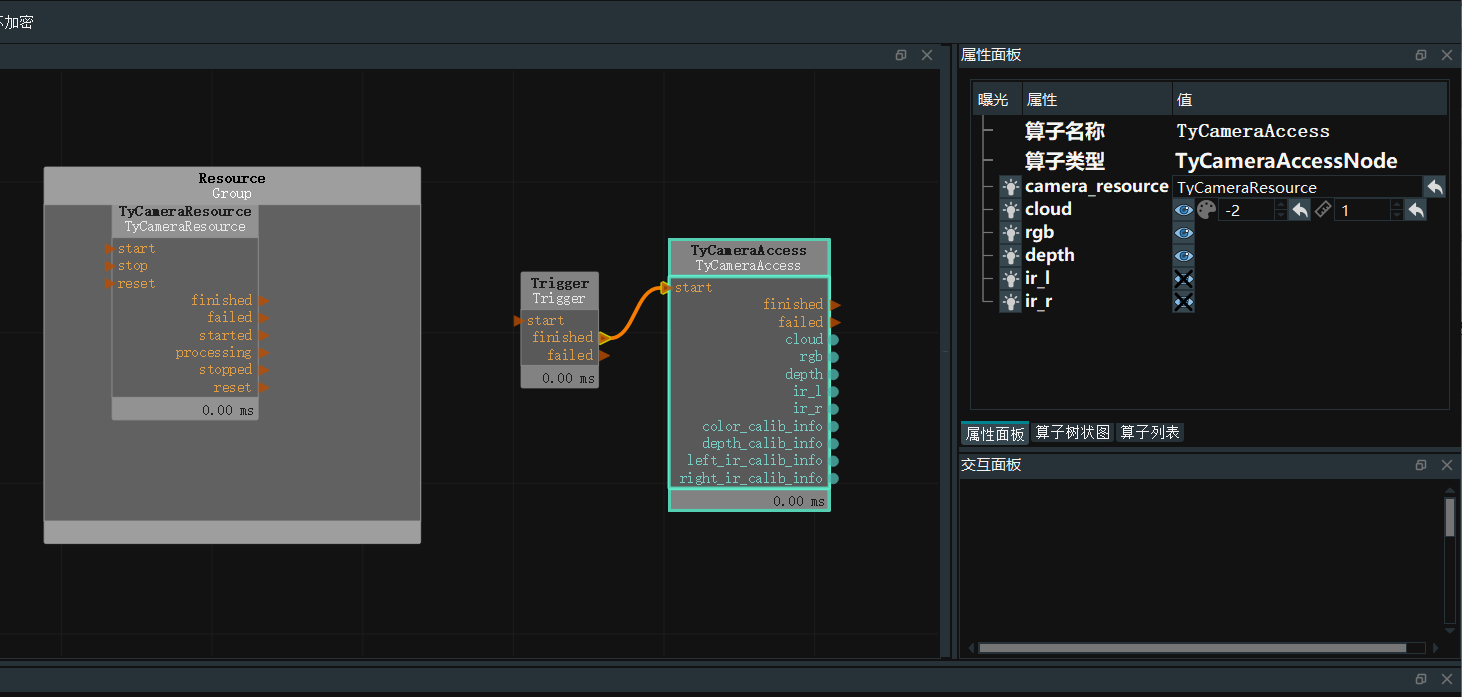
在左上角窗口資源中,找到TyCameraResource 算子添加到算子圖中的 ResourceGroup 中,在算子列表搜索TyCameraAccess,trigger算子分別添加到算子圖中,并根據(jù)需要調(diào)整算子參數(shù)。然后點(diǎn)擊運(yùn)行和屬性面板Trigger->ture即可查看可視化數(shù)據(jù)。沒(méi)有報(bào)錯(cuò)能正常顯示即可進(jìn)行下一步。
TyCameraResource 算子
●start 以及 stop 分別用于開(kāi)啟、關(guān)閉資源算子的線程。auto_start 也是用于開(kāi)啟資源算子,如果勾選,則僅在打開(kāi) RVS 軟件后第一次進(jìn)入運(yùn)行狀態(tài)時(shí)自動(dòng)開(kāi)啟資源線程。
●reset:在打開(kāi)資源線程后如果需要更改屬性參數(shù),需要選中該選項(xiàng)進(jìn)行重置。
TyCameraAccess 算子
●打開(kāi)cloud、rgb、depth可視化屬性,將 cloud_color設(shè)置為-2,代表真實(shí)顏色
myCobot 320-M5Stack
myCobot 320 是面向用戶自主編程開(kāi)發(fā)的實(shí)踐型機(jī)器人,產(chǎn)品最大有效臂展 350mm,最大負(fù)載 1KG,重復(fù)定位精度 ±0.5mm。

環(huán)境搭建
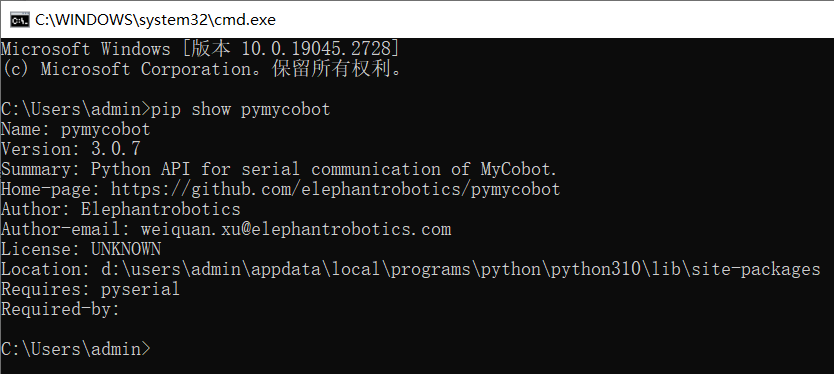
需要python 編譯環(huán)境以及控制機(jī)器人的庫(kù)pymycobot
pip install pymycobot --upgrade
ps:使用的PC的顯卡最好是1060 2G獨(dú)顯以上,因?yàn)樾枰憻拡D片識(shí)別等操作,顯卡的性能越好運(yùn)行得越快
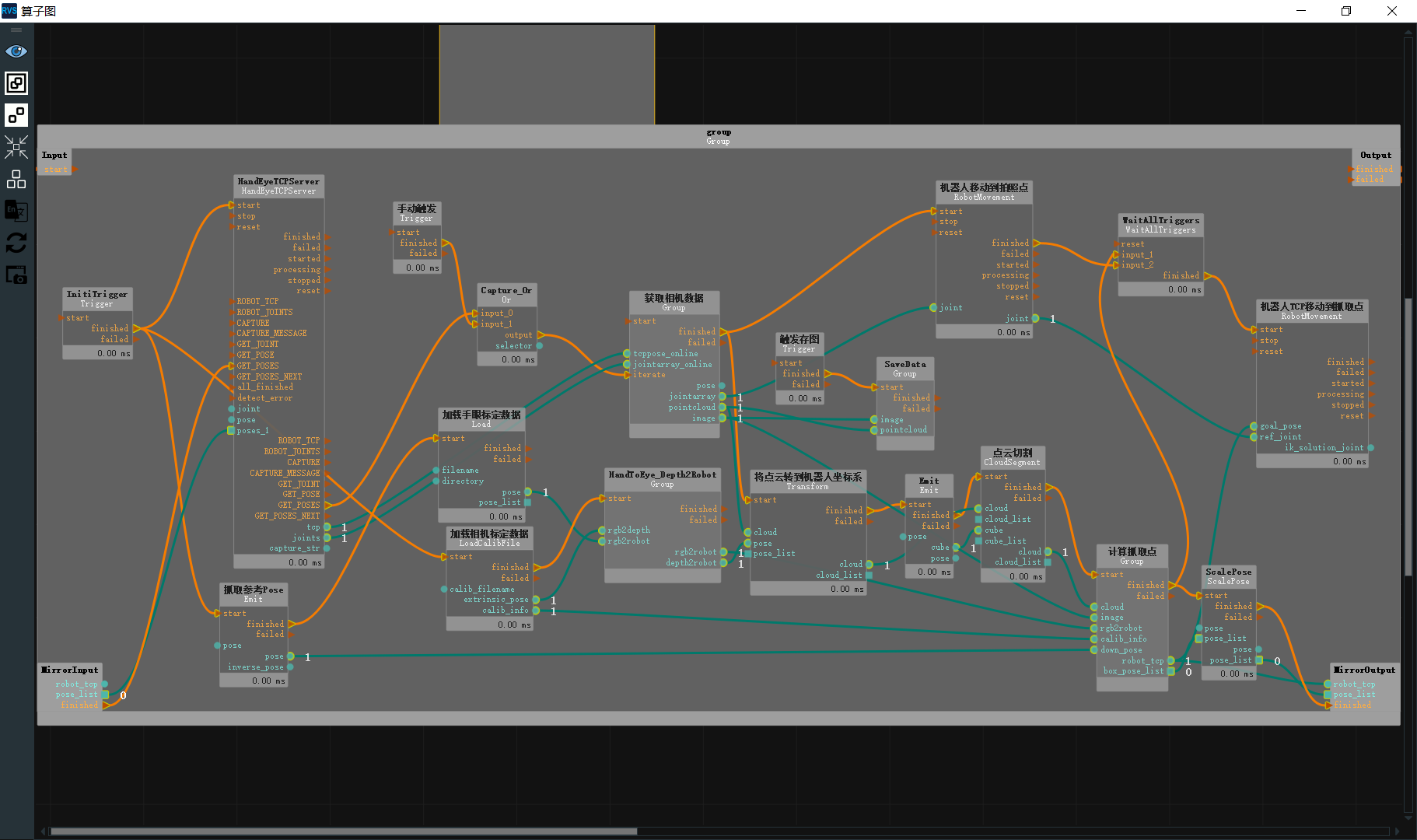
無(wú)序抓取
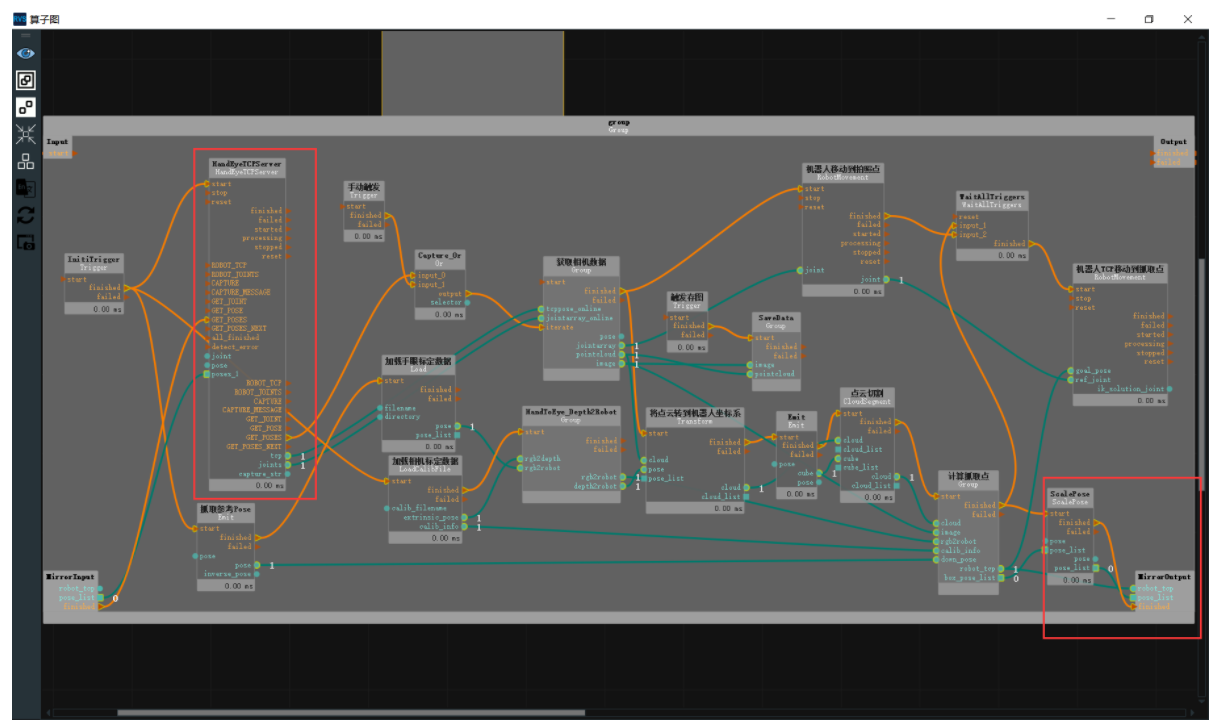
接下來(lái)是實(shí)現(xiàn)機(jī)械臂的無(wú)序抓取,無(wú)論物體處于何種姿態(tài)都能過(guò)精準(zhǔn)的抓到。下圖是整體的算子圖,也就是unstacking.xml工程文件
手眼標(biāo)定
用棋盤(pán)格來(lái)進(jìn)行手眼標(biāo)定
準(zhǔn)備:
●準(zhǔn)備棋盤(pán)格,算好棋盤(pán)格行列數(shù),以及棋盤(pán)格邊長(zhǎng)(mm)
●手眼標(biāo)定分為眼在手上(eye in hand)、眼在手外(eye to hand)。根據(jù)不同情況將標(biāo)定板和相機(jī)固定好。這里選擇eye to hand
數(shù)據(jù)錄制
點(diǎn)擊左上角加載,打開(kāi)unstacking_runtime/HandEyeCalibration/HandEyeCalibration.xml
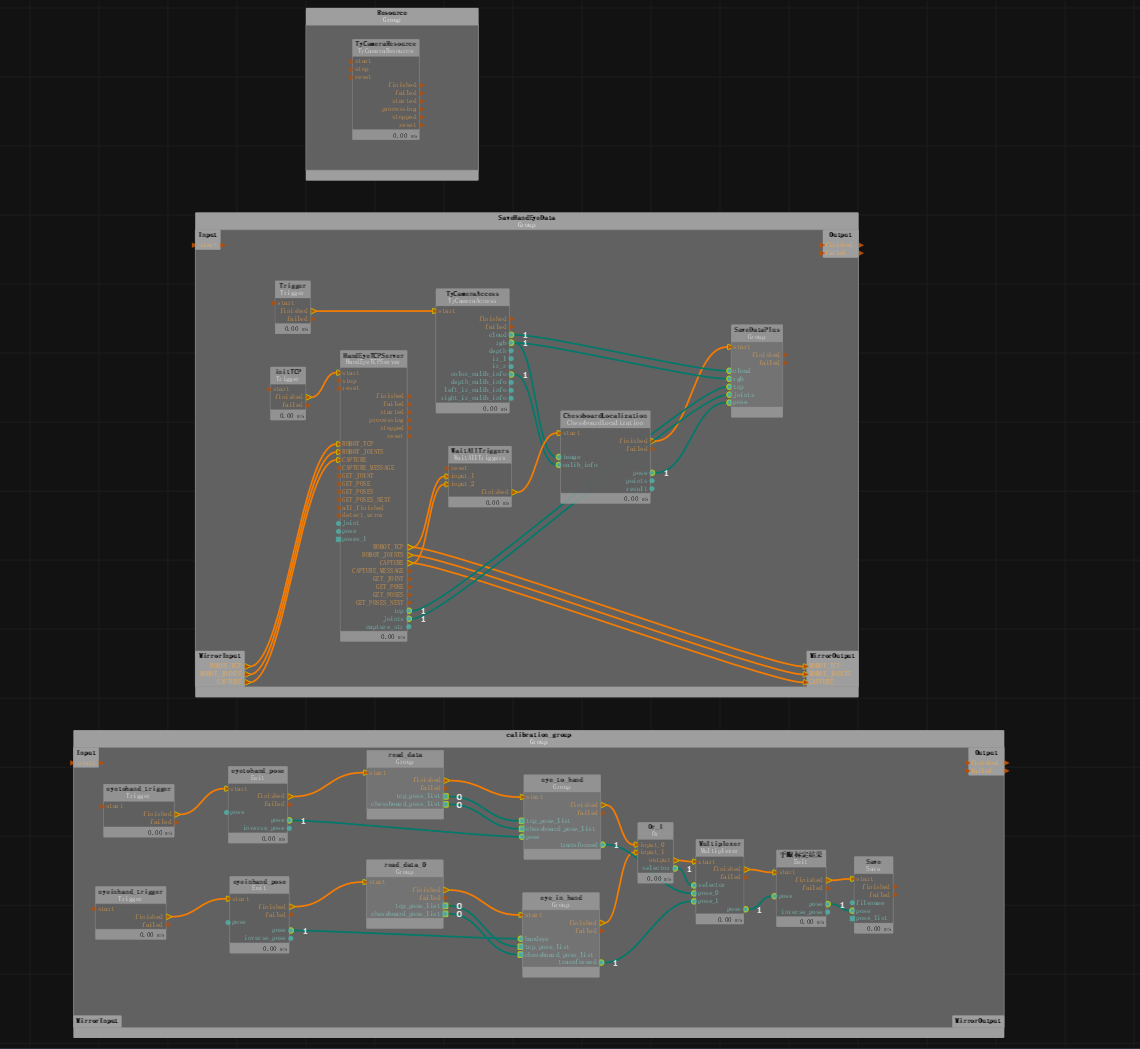
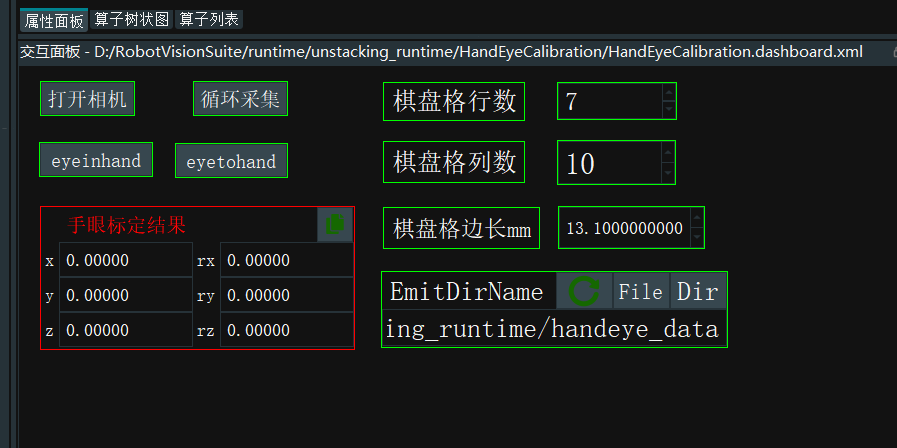
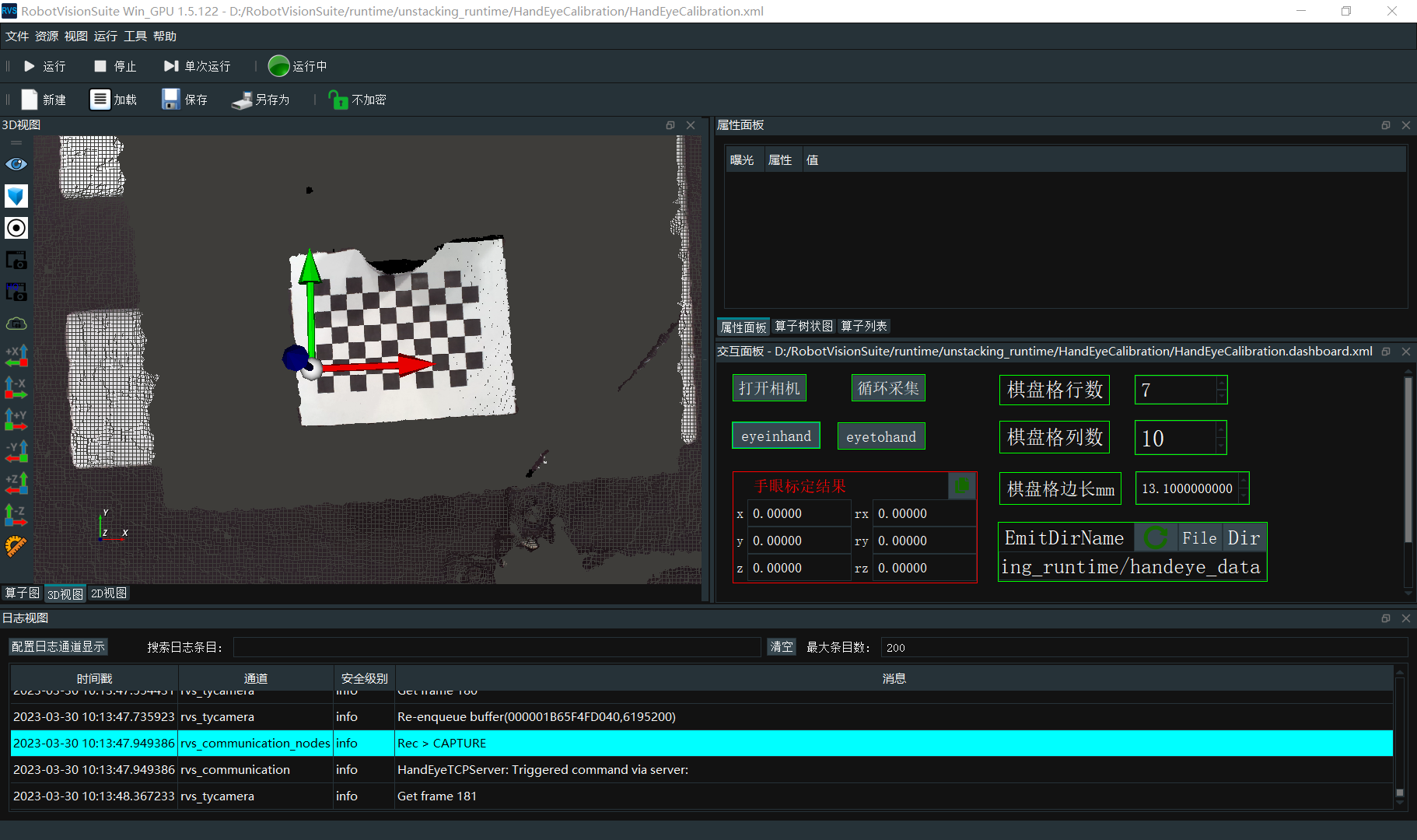
在屬性面板正確填寫(xiě)標(biāo)定板的行列數(shù),和標(biāo)定板格子的單位長(zhǎng)度,和數(shù)據(jù)保存的文件路徑
啟動(dòng)相機(jī)工程和機(jī)械臂開(kāi)始進(jìn)行標(biāo)定.
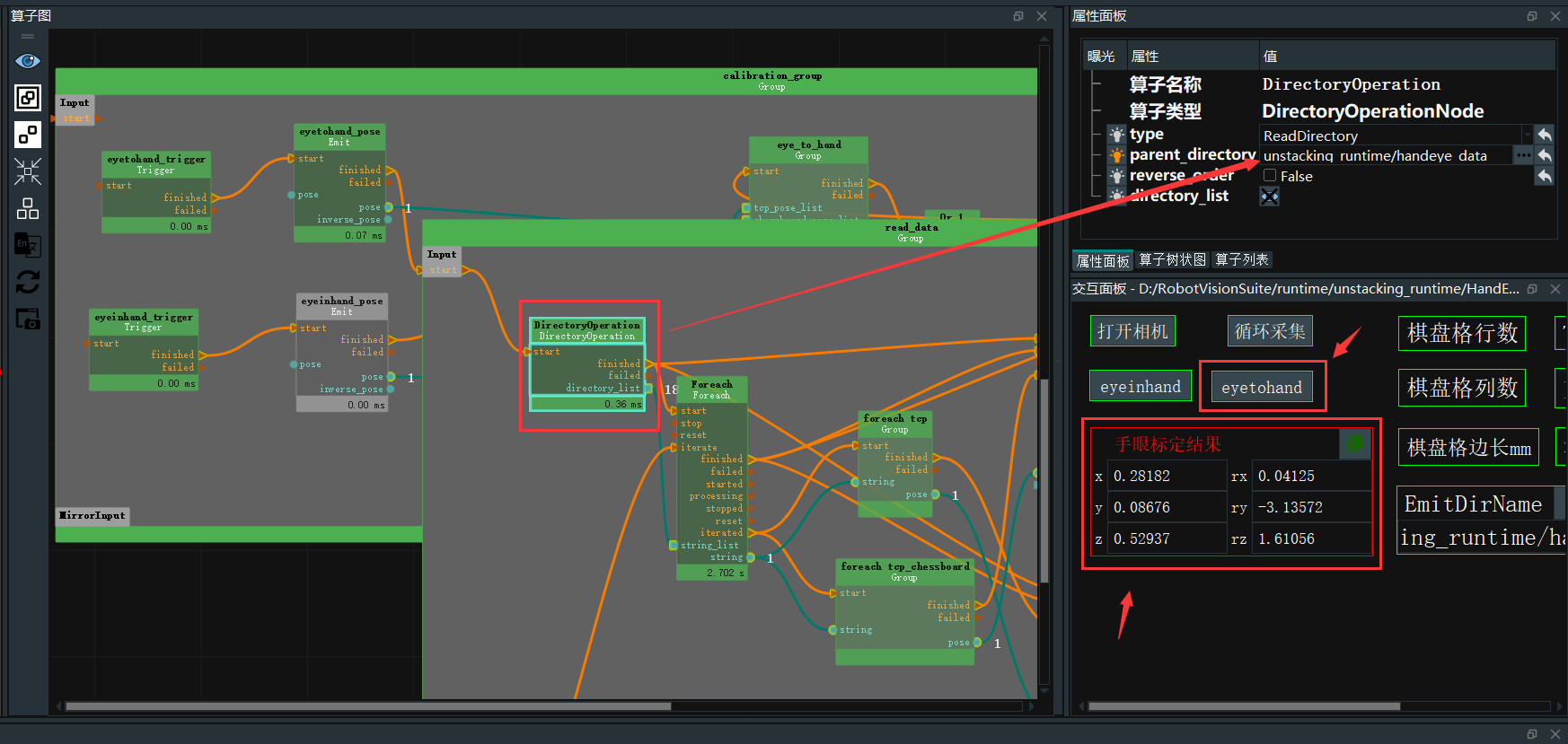
標(biāo)定前確保相機(jī)能完整識(shí)別完整的棋盤(pán)格,以及標(biāo)定過(guò)程中,棋盤(pán)格是固定的,不能發(fā)生移動(dòng)。運(yùn)行完成會(huì)得到18組數(shù)據(jù)。
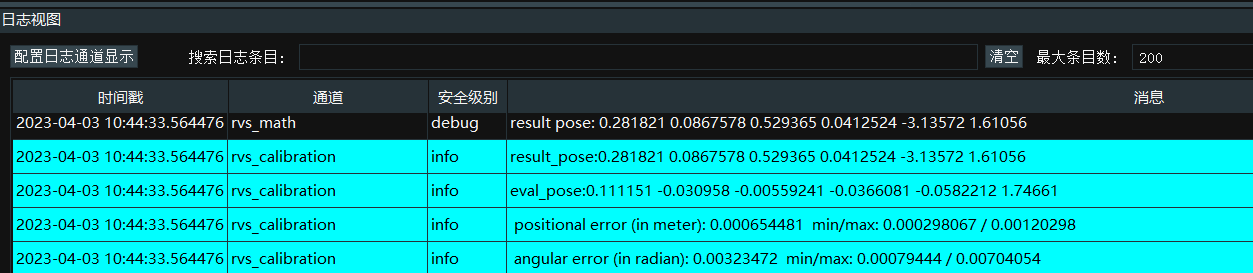
計(jì)算標(biāo)定結(jié)果
positional error 在 0.005(5 毫米)以內(nèi),則比較理想
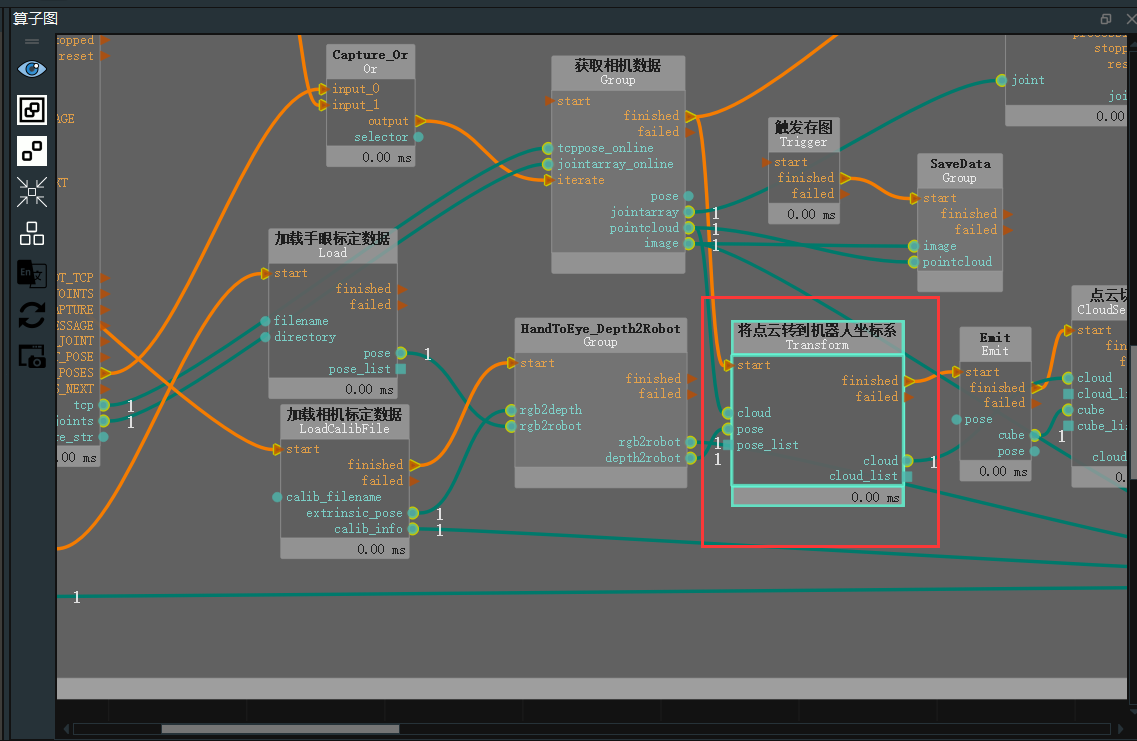
坐標(biāo)系轉(zhuǎn)換
此操作旨在將點(diǎn)云所處的坐標(biāo)系——相機(jī) rgb 鏡頭坐標(biāo)系轉(zhuǎn)換至機(jī)器人坐標(biāo)系,這一轉(zhuǎn)換涉及相機(jī)外參及手眼標(biāo)定結(jié)果。
步驟:
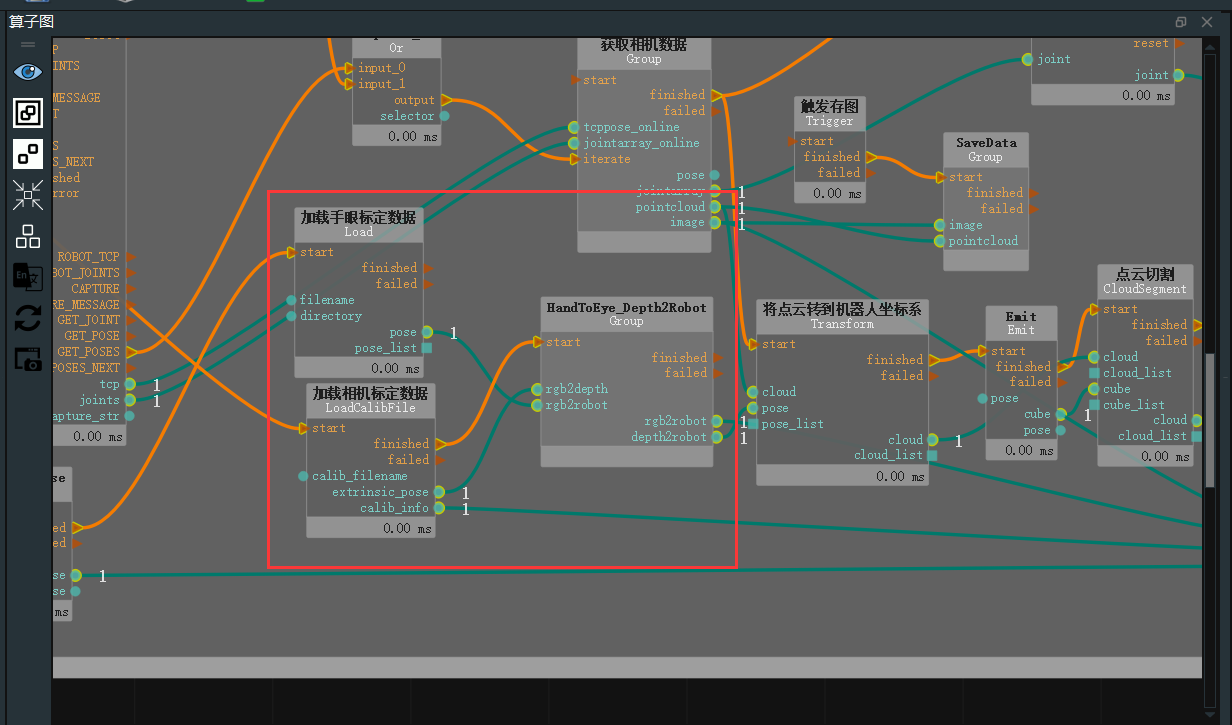
●1)在算子圖中右鍵選擇在此處導(dǎo)入Group XML,導(dǎo)入RVSCommonGroup 中的HandToEye_Depth2Robot.group.xml。需要注意的是,除了該文件之外 ,還有HandInEye_Depth2Robot.group.xml。
●2)加載手眼標(biāo)定數(shù)據(jù)組的pose端口與HandToEye_Depth2Robot組的rgb2robot 端口連接。
●3)拖入 LoadCalibFile 算子,用于加載標(biāo)定文件,finshed 端口連接至HandToEye_Depth2Robot組的start端口;extrinsic_pose端口與rgb2depth 端口連接;start端口與InitTrigger端口finished端口連接。具體連接如下:
點(diǎn)擊 Group,找到 rgb2tcp 算子,在屬性面板的 pose 屬性處,粘貼手眼標(biāo)定的結(jié)果。
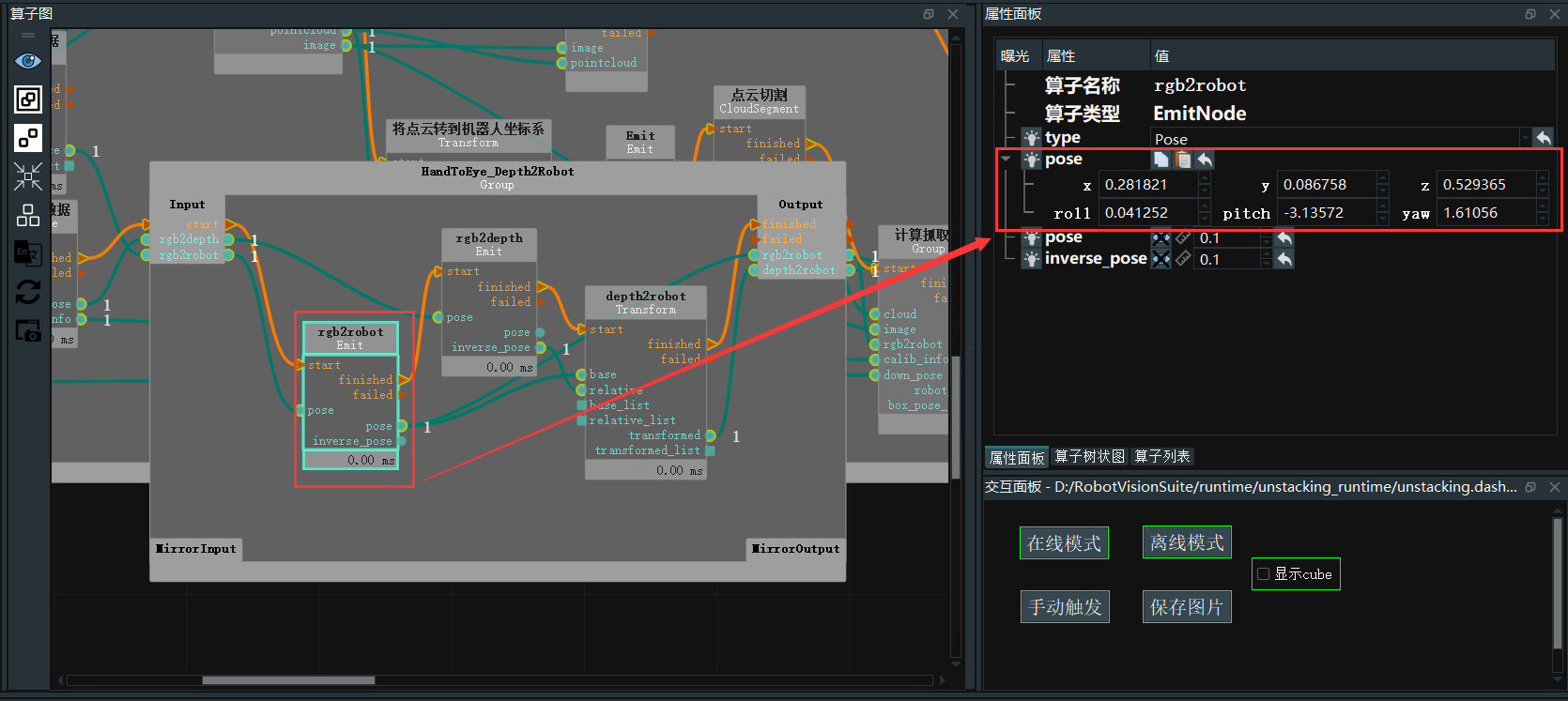
●5)通過(guò)前述步驟,我們已經(jīng)獲取了相機(jī) rgb 鏡頭轉(zhuǎn)機(jī)器人坐標(biāo)系的矩陣 rgb2robot 和相機(jī)深度鏡頭轉(zhuǎn)機(jī)器人坐標(biāo)系的矩陣 depth2robot,此處我們將相機(jī)深度鏡頭坐標(biāo)系下點(diǎn)云轉(zhuǎn)換至機(jī)器人坐標(biāo)系下。
●6)首先拖入 Transform 算子,type 屬性選擇“PointCloud”,將 depth2robot 端口連接至該算子的pose 輸入端口,將 LoadLocalData 算子組的 pointcloud 端口連接到本算子的同名輸入端口。
AI訓(xùn)練
采集訓(xùn)練圖像
打開(kāi) unstacking_runtime/MaskRCNN/ty_ai_savedata.xml,內(nèi)容基本與錄制 RGB 圖像一致,在這里我們只需要調(diào)整 EmitSring 中的 string 參數(shù),設(shè)置為我們想要的路徑即可。點(diǎn)擊 Capture 錄制圖像。當(dāng)然數(shù)據(jù)越多那是越好,越穩(wěn)定。
標(biāo)注訓(xùn)練模型
目前為已錄制好的 RGB 標(biāo)注,我們推薦使用 labelme 這款軟件,本文檔提供一種 labelme 的安裝方法。
●1.按照官網(wǎng)安裝pip
https://pip.pypa.io/en/stable/installation/
●2.安裝PyQt5
pip install PyQt5
●3.安裝labelme
pip install labelme
標(biāo)注前準(zhǔn)備
首先確定任務(wù)目標(biāo),明確在檢測(cè)過(guò)程中什么物體需要被檢測(cè),什么物體不需要被檢測(cè),從而有針對(duì)性的進(jìn)行標(biāo)注。
給定的標(biāo)注條件無(wú)需過(guò)分苛刻,不要按照人的思維去考慮,而是按照自己主觀設(shè)定的標(biāo)注思路是否便于落實(shí)代碼。
標(biāo)注過(guò)程
●終端輸出labelme,打開(kāi)軟件點(diǎn)擊OpenDir,選擇我們標(biāo)注的路徑(在3.2.1采集訓(xùn)圖像Emit算子string路徑)
●點(diǎn)擊Create Polygons,為木塊繪制紅色的邊框
●完成后會(huì)彈出命名框,第一次請(qǐng)命名 wooden block,后續(xù)同類直接選擇
●當(dāng)圖像內(nèi)所有箱子標(biāo)注完成后,點(diǎn)擊 Save 進(jìn)行保存,默認(rèn)當(dāng)前文件夾,默認(rèn)名稱,隨后選擇 Next Image 切換到下一個(gè)圖像
訓(xùn)練AI模型
開(kāi)unstacking_runtime/MaskRCNN/ty_ai_train.xml,這里只需要調(diào)整 data_directory 和classnames _filepath 路徑。點(diǎn)擊 start_train按鈕即開(kāi)始訓(xùn)練。
最終會(huì)生成一個(gè) train output 文件夾在這個(gè)文件夾中有命名為 model fial,pth是所需要的權(quán)重文件。
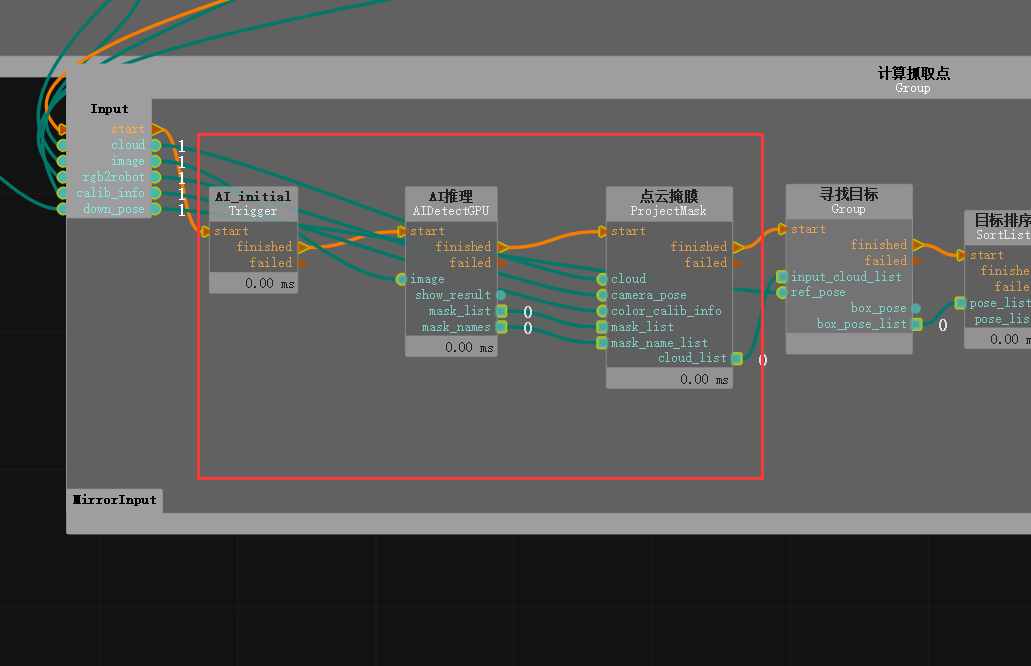
AI推理
1)拖入一個(gè) Emit 算子,type 屬性選擇“pose”,重命名為“抓取參考Pose”,將 pose_roll 輸入入“3.141592654”。這個(gè)算子在后續(xù)的算子中使用。將該算子中 pose 端口與計(jì)算抓取點(diǎn)組down_pose 端口連接
2)雙擊展開(kāi)計(jì)算抓取點(diǎn)組,需要預(yù)先使用 MaskRCNN 網(wǎng)絡(luò)對(duì)數(shù)據(jù)進(jìn)行訓(xùn)練,將其中的AIDetectGPU 算子的 type 更改為MaskRCNN 并對(duì)應(yīng)修改其余配置文件參數(shù)。由于 AI 推理算子在正式運(yùn)行前需要初始化運(yùn)行一次,所以需要在算子前額外添加一個(gè) Trigger(type 為 InitTrigger)。
3)AI 推理算子會(huì)獲得目標(biāo)在 2D 圖像中的位置區(qū)域(即掩碼圖,對(duì)應(yīng)的是 obj_list 端口),之后我們需要將這些位置區(qū)域轉(zhuǎn)換到 3D 點(diǎn)云中,這一環(huán)節(jié)對(duì)應(yīng)的是 計(jì)算抓取點(diǎn) 組中的 ProjectMask 算子。對(duì)于 ProjectMask 算子,不僅需要給入 AI 推理算子獲得的 obj_list,還需要給入 2D 圖對(duì)應(yīng)的點(diǎn)云、2D圖采圖時(shí)所用的 rgb 鏡頭坐標(biāo)系同點(diǎn)云坐標(biāo)系的轉(zhuǎn)換矩陣、相機(jī) rgb 鏡頭的內(nèi)參。這里已經(jīng)將點(diǎn)云轉(zhuǎn)換到了機(jī)器人坐標(biāo)系,所以需要輸入 rgb 鏡頭到機(jī)器人坐標(biāo)系的轉(zhuǎn)換矩陣。相機(jī)的 rgb 鏡頭內(nèi)參可以直接從相機(jī)參數(shù)文件中讀取。算子運(yùn)行完成后,會(huì)獲得所有檢測(cè)目標(biāo)的點(diǎn)云列表。
機(jī)械臂定位抓取
定位識(shí)別
根據(jù) AI 推理后的流程,已經(jīng)獲得了在機(jī)器人坐標(biāo)系下所有檢測(cè)目標(biāo)的點(diǎn)云列表。接下來(lái)要獲得它的點(diǎn)云中心坐標(biāo)。
1)雙擊展開(kāi) 計(jì)算抓取點(diǎn) 組中 尋找目標(biāo) 組。需要先篩選木塊,并按照木塊列表的 Z 軸坐標(biāo)值進(jìn)行篩選,篩選出最上層的木塊,并對(duì)上層木塊進(jìn)行排序。因此這里使用 FilterBoxList 算子,重命名為“點(diǎn)云高度排序”,該算子的屬性值調(diào)整如下:
2)獲取平面,使用 FindElement,type 選擇“Plane”,獲得點(diǎn)云中適合抓取的平面。調(diào)整算子屬性distance_threshold 來(lái)調(diào)整所選取的平面。打開(kāi) cloud 可視化屬性來(lái)查看選取的平面。
3)獲取平面中心點(diǎn),使用 MInimumBoundingBox 算子,重命名為“獲得外包框”,type 屬性選擇“ApproxMVBB”獲得一個(gè)方便機(jī)器人抓取的坐標(biāo)中心點(diǎn)。這里需要給該算子一個(gè) ref_pose,這里連接在3.3.4進(jìn)行AI推理中提到的“TowardsDownPose”,表示繞著 X 軸旋轉(zhuǎn) 180°,使 Z 軸朝下,便于機(jī)器人抓取。打開(kāi)“GetBoxCube”屬性面板 box 和 box_pose 可視化屬性即可顯示計(jì)算出的平面中心點(diǎn)。
4)調(diào)整木塊方向,使用AdjustBoxNode算子,該算子的作用是,選擇長(zhǎng)度大于寬度的物體,將物體位姿進(jìn)行改變,這里選擇yaw選擇90°
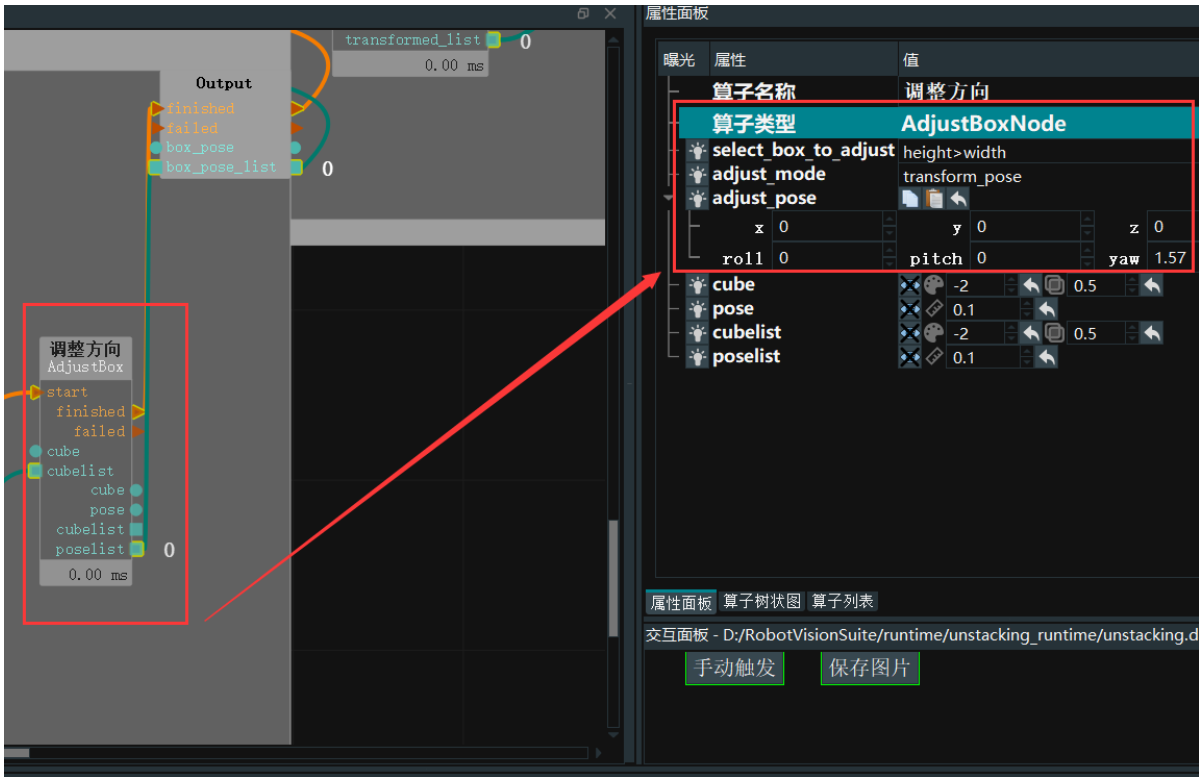
這樣就能夠獲取到坐標(biāo)了
機(jī)械臂的抓取
在完成上述操作后,已經(jīng)獲得了目標(biāo)點(diǎn)坐標(biāo),需要通過(guò)機(jī)器人和RVS軟件建立連接并進(jìn)行 tcp通訊。進(jìn)行實(shí)際抓取。
1)編寫(xiě)TCP通訊代碼(RobotControl_Elephant.py),以下部分為截取,該代碼實(shí)現(xiàn)RVS軟件和機(jī)械臂的TCP通訊
#CAPTURE print("***get pose***%s"%time.asctime()) capture_cmd = "GET_POSES n" capture_bytes=bytes(capture_cmd,encoding="utf-8") sock_rvs.send(capture_bytes) #recv CAPTURE data = sock_rvs.recv(socket_buf_len) print("---------------------------接收的數(shù)據(jù)----------------------------") print(data) print("***data end***%s"%data[-1:]) print("***capture_receive***%s"%time.asctime()) if int(data[-1:]) == 1: print("***received CAPTURE result***n") if int(data[-1:]) == 2: print("***All finished!***" #P_FLAG = bool(1-P_FLAG) #print("切換拍照位") continue #break
2)將目標(biāo)點(diǎn)進(jìn)行調(diào)整坐標(biāo)?例,將 ScalePose 算?的 type 設(shè)置為 Normal ,分別調(diào)整 pose 的( X 、Y 、Z )和( Roll 、Pitch 、Yaw)?例。scale_rpy:修改 pose 中 r p y 的單位。設(shè):57.2957795 。即從將弧度切換為?度。
3)最后,將ScalePose的 finished 和pose_list端口連接到最外層算子組的 MirrorOutput 端口, 并連接回 HandEyeTCPServer算子。至此,項(xiàng)目文件的編輯已經(jīng)完成。
效果展示
完成以上步驟,在unstacking.xml工程下,點(diǎn)擊運(yùn)行,同時(shí)運(yùn)行RobotControl_Elephant.py文件,識(shí)別到多個(gè)木塊選取其中一個(gè)木塊位姿就會(huì)發(fā)送給機(jī)械臂進(jìn)行夾取。

總結(jié)
總的來(lái)說(shuō)這只是深度相機(jī)的一小點(diǎn)功能,后續(xù)甚至考慮將這幾個(gè)物體疊在一起又或者其他的不規(guī)則形狀來(lái)體現(xiàn)出它性能的強(qiáng)大。提前訓(xùn)練好模型,就能實(shí)現(xiàn)想要的效果。你期待我用它來(lái)做些什么呢?歡迎在地下留言,你們的點(diǎn)贊和關(guān)注將是我更新的動(dòng)力!
審核編輯黃宇
-
3D
+關(guān)注
關(guān)注
9文章
2959瀏覽量
110726 -
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
163文章
4594瀏覽量
122870 -
機(jī)械臂
+關(guān)注
關(guān)注
13文章
554瀏覽量
25374 -
大象機(jī)器人
+關(guān)注
關(guān)注
0文章
86瀏覽量
121
發(fā)布評(píng)論請(qǐng)先 登錄
人形機(jī)器人 3D 視覺(jué)路線之爭(zhēng):激光雷達(dá)、雙目和 3D - ToF 誰(shuí)更勝一籌?
2025年機(jī)器視覺(jué)行業(yè)調(diào)研報(bào)告
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
復(fù)合機(jī)器人抓取精度的影響因素及提升策略
昨日,杭州3D視覺(jué)傳感器公司獲數(shù)億元融資!

從3D到AI,機(jī)器視覺(jué)全面賦能工業(yè)自動(dòng)化
DLP160CP DMD是否可以應(yīng)用于機(jī)器視覺(jué)應(yīng)用?
機(jī)器人3D視覺(jué)傳感器需求爆發(fā)!英特爾、奧比中光領(lǐng)跑,百億市場(chǎng)爭(zhēng)奪戰(zhàn)開(kāi)啟
解決方案 3D 視覺(jué)機(jī)器人賦能汽車制造新征程

探索3D視覺(jué)技術(shù)在活塞桿自動(dòng)化抓取中的應(yīng)用
智能移動(dòng)機(jī)器人

適用于3D機(jī)器視覺(jué)的高度可擴(kuò)展的TI DLP技術(shù)

微視傳感高性能3D視覺(jué)產(chǎn)品亮相2024上海機(jī)器視覺(jué)展
3D視覺(jué)技術(shù)廣闊的應(yīng)用前景





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論