 雷達資訊 | 微波視覺三維合成孔徑雷達(MV3DSAR)
雷達資訊 | 微波視覺三維合成孔徑雷達(MV3DSAR)


背景及意義
陣列干涉合成孔徑雷達(SAR)通過一次飛行就可獲得空間多角度相干觀測數據,能有效排除時間去相干的影響,實現對測區的三維成像。然而當前陣列干涉三維SAR系統所需的通道數較多(通常需要十余個),系統復雜、研制難度大,系統的低成本、小型化及其應用推廣均具有較大難度,亟需在SAR三維成像理論和體制上進行創新。
近年來,在國家自然科學基金重大項目的支持下,中國科學院空天信息創新研究院丁赤飚院士、仇曉蘭研究員牽頭,并聯合中科宇達(北京)科技有限公司成功設計研制了國內首套無人機載小型化陣列干涉三維SAR系統,稱為微波視覺三維SAR(MV3DSAR),并成功開展了飛行實驗,僅用四個陣列通道就獲得了復雜場景的三維成像結果,顯示了良好的三維結構重建和目標解疊掩能力,促進了SAR三維成像技術的新發展。
系統技術參數及關鍵技術
MV3DSAR系統的總體構成如下表和圖所示,其主要由微小型SAR載荷、無人機平臺及導航系統三部分組成,通過結構件進行固定和連接。為了實現基線可重構的需求,系統在天線支架上打有固定間隔的排孔,可以根據需求進行天線構型的靈活配置。表 1 MV3DSAR系統總體構成| 序號 | 名稱 | 說明 |
| 1 |
微小型 Ku-SAR |
Ku-波段SAR系統,由雷達主機、天線及天線支架、開關組合、數據存儲模塊等組成 |
| 2 | 無人機平臺 | 采用KWT-X6L-15六旋翼無人機,最大作業載荷15kg、最大翼展尺寸2.53m,最大飛行速度15m/s |
| 3 | 導航系統 | 由GPS模塊和微型慣性測量單元(MIMU)模塊組成;航跡測量精度0.05m,姿態測量精度0.02度 |
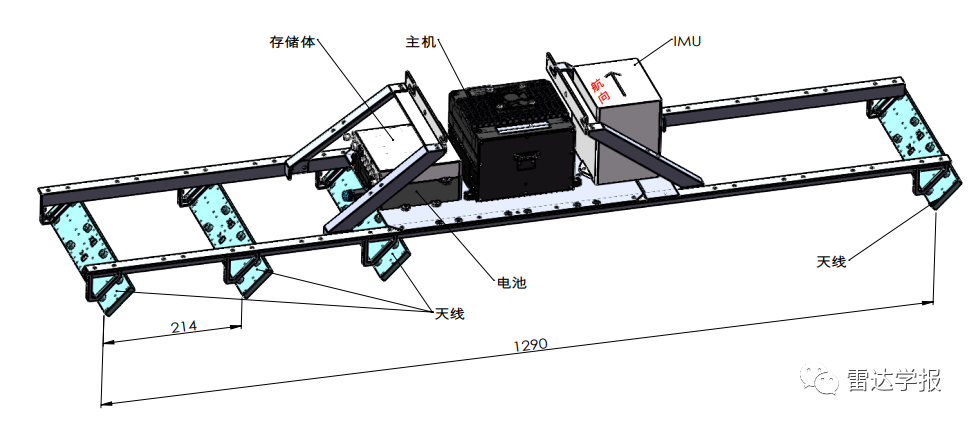

MV3DSAR系統最核心的是Ku波段陣列干涉SAR,該SAR載荷的主要參數如下表所示,其采用調頻連續波體制,信號帶寬為1.2GHz,中心頻率為15.2GHz,重量為7.07kg。
表 2Ku波段陣列干涉SAR載荷參數| 序號 | 參數名稱 | 參數值 |
| 1 |
中心頻率 |
15.2 GHz |
| 2 | 信號形式 | 調頻連續波(FMCW) |
| 3 | 極化方式 | 全極化 |
| 4 | 信號帶寬 | 1200 MHz |
| 5 |
天線尺寸 (單通道) |
0.05 m(俯仰)×0.05 m(俯仰) |
| 6 | 每個極化的陣列通道數 | 4 |
| 7 | 分辨率 |
優于0.2 m(距離)×0.2 m(方位)×2m(斜高) |
| 8 | 通道相位不平衡穩定度 | ±5°(10 min內) |
| 9 | 通道幅度不平衡穩定度 | ±0.2 dB(10 min內) |
| 10 | 中心視角 | 45° |
| 11 | NESZ |
不大于-30 dB (最遠作用距離3.6 km) |
| 12 | 天線最小間隔 | 0.107 m |
| 13 | 天線最大間隔 | 1.284 m |
| 14 | Ku-SAR重量 | 主機、存儲、電池、天線、結構等一共7.07 kg |
MV3DSAR系統致力于小型化、低成本、高精度,在系統研制過程中突破的主要關鍵技術包括以下幾個方面:
(1)多通道一致性技術
MV3DSAR具有多個接收通道,為保證多通道信號之間延時、增益與相位的一致性,MV3DSAR采用了基于低溫共燒陶瓷技術的多通道一致性設計、一致性定標回路設計、多通道間電磁屏蔽防串擾設計等有效方案,使得系統通道間相位一致性達到±5度以內,為三維成像提供有力保障。
(2) 高精度運動補償技術
MV3DSAR作業平臺飛行高度相對較低,運動誤差及姿態變化對成像的影響相對較大,同時陣列干涉要求高精度保相成像,因此對運動補償提出了更高的要求。MV3DSAR集成了微型慣性測量單元,通過雙捷聯處理獲取相對位置精度優于0.3mm的航跡測量數據;同時在成像過程中根據中心頻率的變化進行處理頻帶和運動誤差計算參考的調整,并提出基于子孔徑處理和相干合成的高精度運補成像算法,有效保證了成像精度和效率。
(3) 基于微波視覺的SAR三維成像技術
由于MV3DSAR只有4個陣列通道,現有三維成像方法在較少觀測次數下面臨三維求解誤差大、空間模糊等問題。因此,MV3DSAR創新性地將微波視覺信息與SAR三維成像模型有機結合,實現了少量通道下的三維成像。具體的,通過SAR圖像語義分割和點云迭代處理提取空間幾何結構約束,用于約束三維成像的解空間并進行三維解模糊,以提升少量觀測下的三維成像性能。
微波視覺三維SAR
成像結果展示
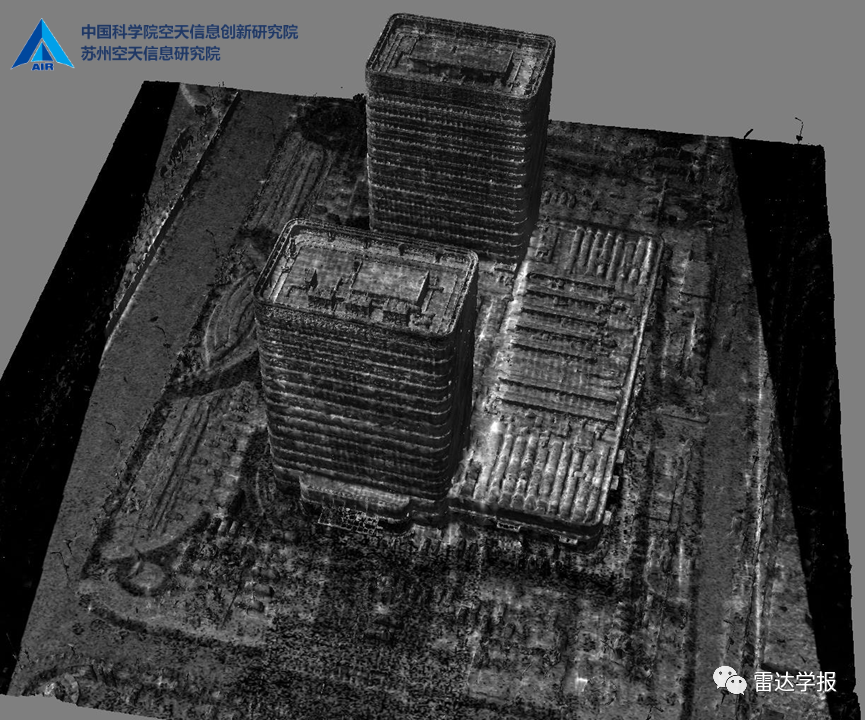
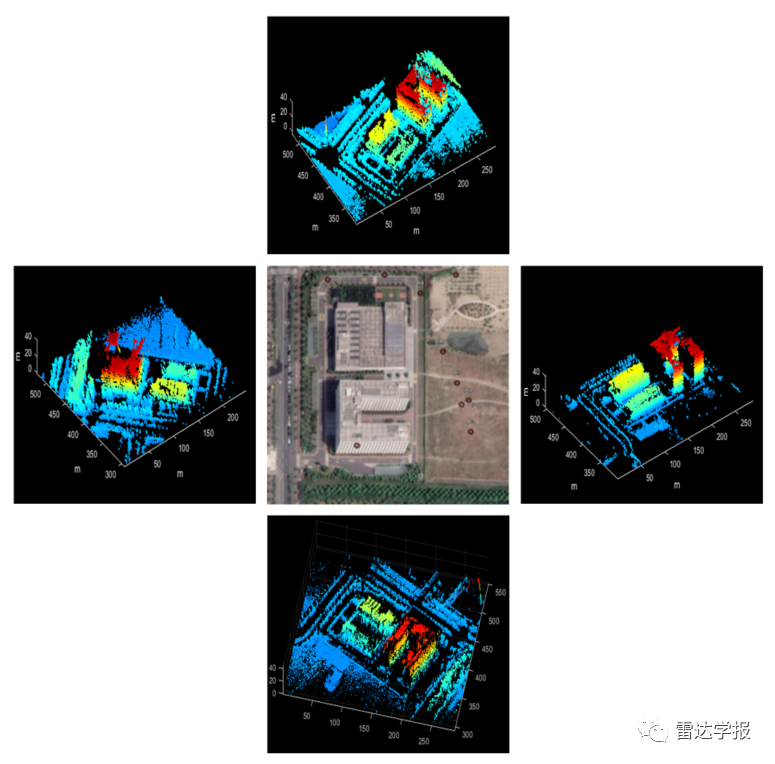
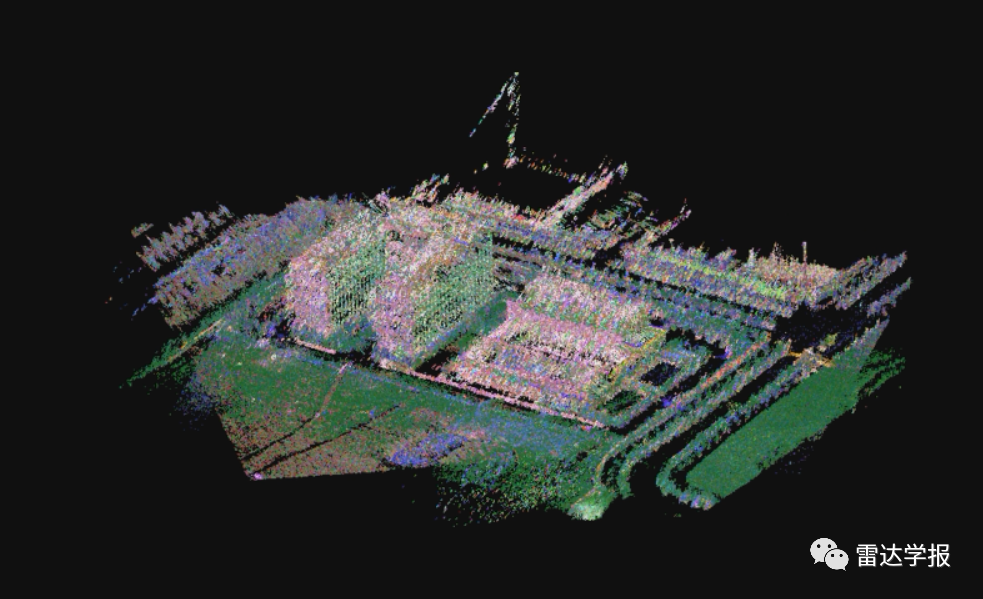
MV3DSAR系統已經分別在天津、蘇州地區完成了多次飛行試驗,成功處理得到了測區內單極化、全極化的三維成像結果,如下所示。
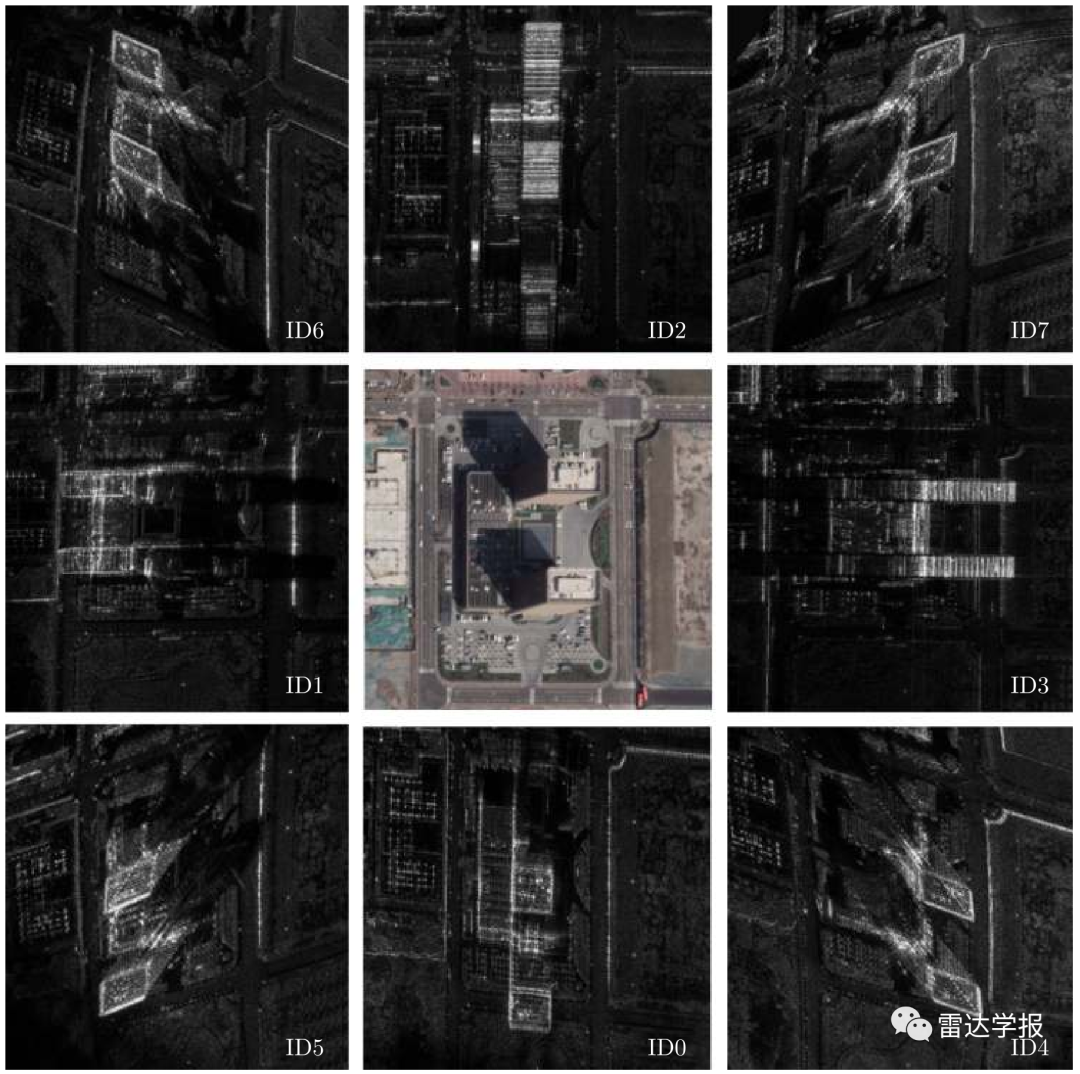
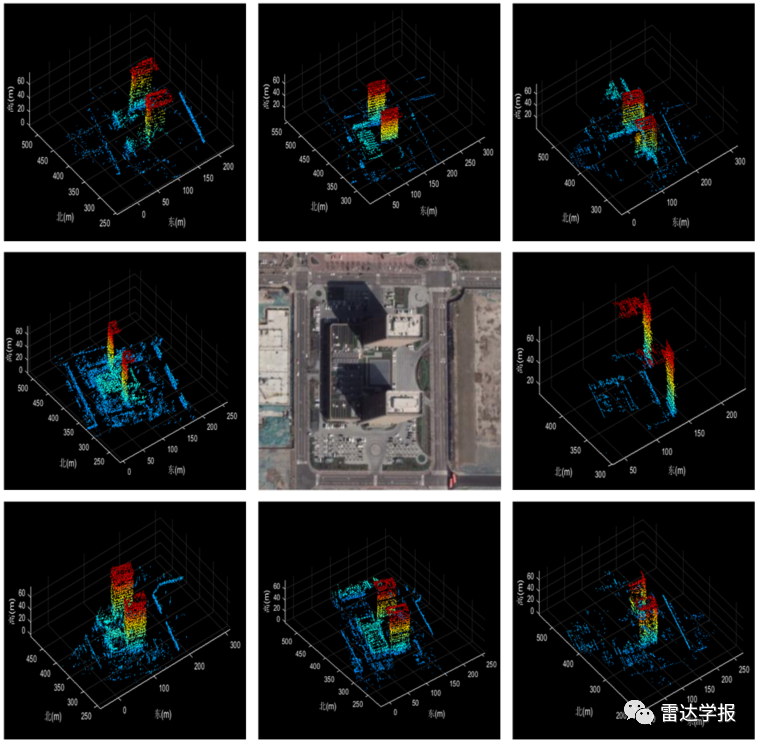
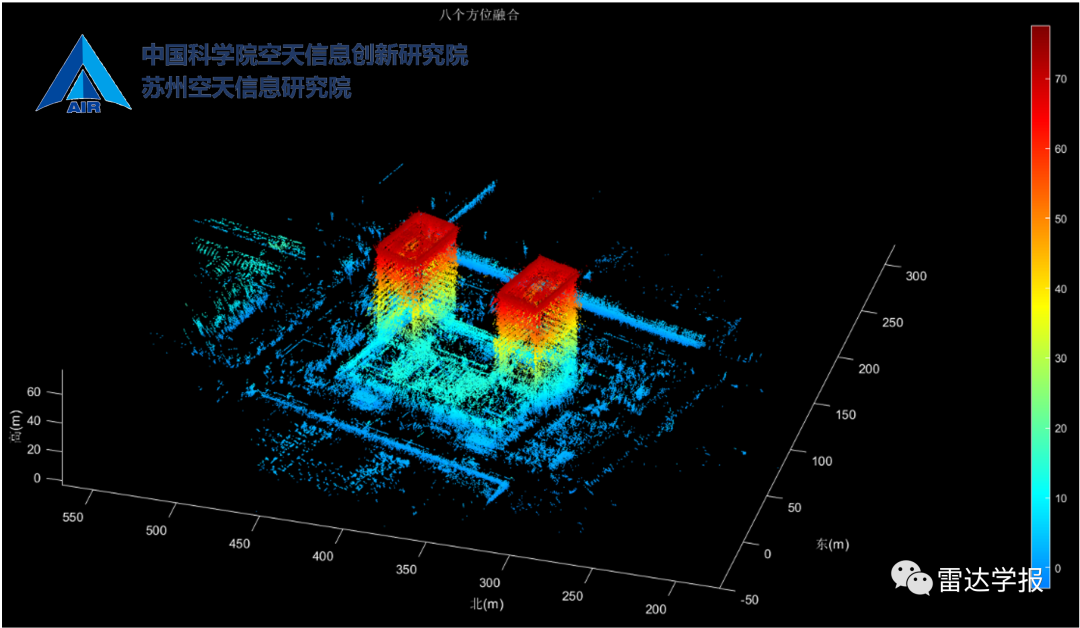
圖 3天津臨港商務大廈各角度三維成像融合結果(單極化,按高度渲染)
此外,針對傳統二維成像難以分辨的疊掩區域,研究團隊對上述三維成像結果進行了解疊掩分析,結果如下所示。
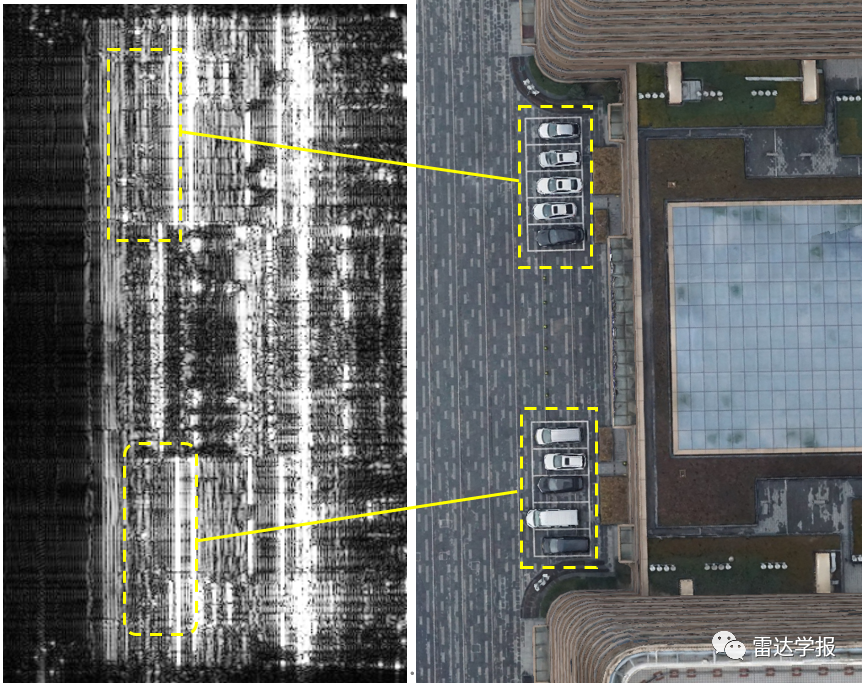
圖 7建筑物與汽車等解疊掩效果
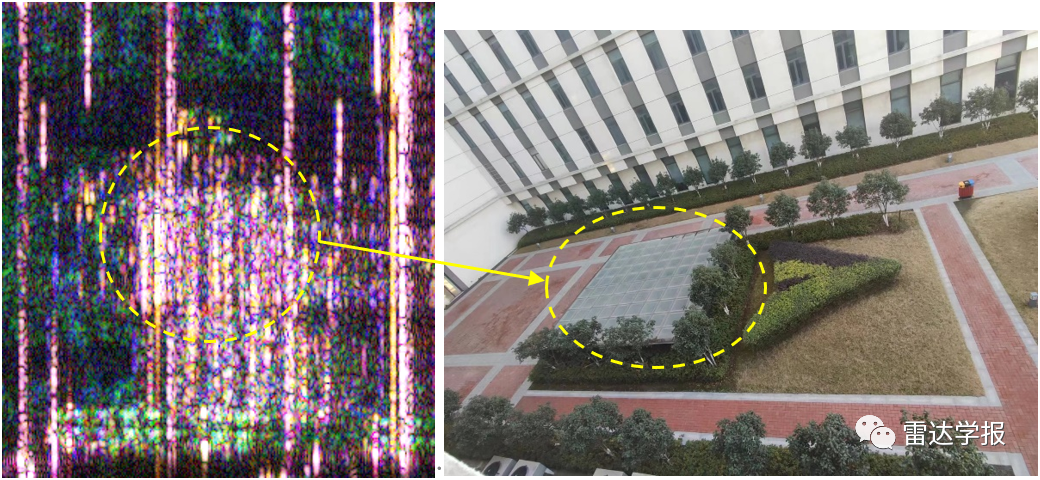
圖 8屋頂與采光井的解疊掩效果
更多雷達科普與資訊請點擊“閱讀原文” ↓↓↓相關閱讀
第三屆“雷達與未來”全球峰會雷達與微波視覺分論壇暨第三期雷達學報大講堂通知
博士論壇 | 基于壓縮采樣恢復的高軌照射源雙基SAR成像方法(視頻)
學術報告 | 多角度SAR三維成像技術研究進展(視頻)
學術講堂 | 基于GNSS的雙基SAR成像處理技術(視頻)
審核編輯黃宇
-
SAR
+關注
關注
3文章
427瀏覽量
46996 -
雷達
+關注
關注
51文章
3128瀏覽量
120358 -
三維成像
+關注
關注
0文章
35瀏覽量
11341
發布評論請先 登錄
打造數字化礦山智能化監測:露天礦邊坡雷達
超酷的樹莓派激光雷達掃描儀!

奧比中光亮相第四屆中國三維視覺大會
原理圖下載 高性價比無人機載合成孔徑雷達系統
無人機載合成孔徑雷達系統研制手記(二):電子設計及天線

無人機載合成孔徑雷達系統研制手記(一):設計原理

我國光子毫米波雷達技術取得突破性進展
三維測量在醫療領域的應用
相控陣雷達電源芯片詳解
一些著名的微型SAR

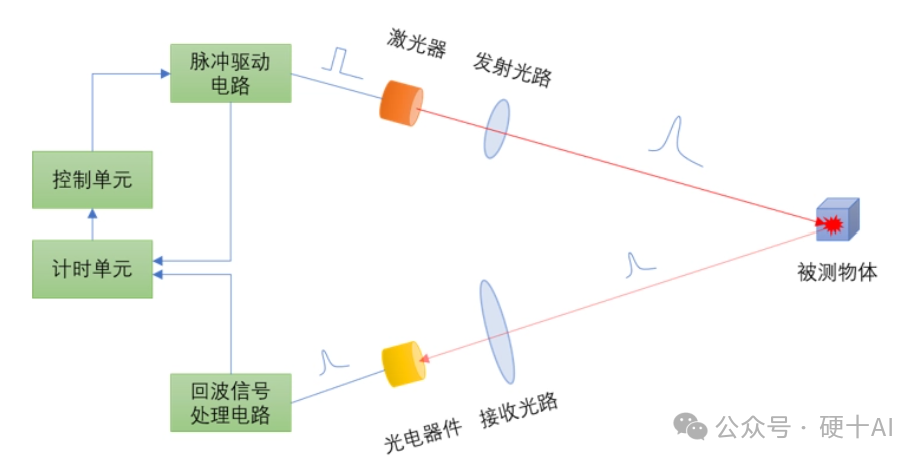
激光雷達的工作原理和分類
什么是三維點云分割
微波雷達水位在線監測 微波雷達水速在線監測
友思特方案 基于三維點云實現PCB裝配螺絲視覺檢測






 工商網監
工商網監
評論