 基于靜態傳感器節點的定位技術
基于靜態傳感器節點的定位技術
對于移動機器人,定位技術是保證移動機器人軌跡/運動作業的前提技術,特別是跟蹤作業的基礎。
與自動駕駛車輛定位不同,小型移動機器人更需要的是定位精度。根據作業環境,小型移動機器人定位技術可以視為室內定位系統(Indoor Location System, ILS)。小型移動機器人定位技術不同于機械加工領域的定位技術,從關鍵詞上可以明顯區別“Location/Localization”與“Position/Positioning”。Localization 指的是機器人在作業空間內的自身的位置關系問題,position 是會指向更精密的點問題。
本文的主要內容包括:室內定位測量原理(物理屬性)[1],室內定位技術,定位模型方法,定位算法,定位系統評價因子,基于慣導的定位系統,基于無線電網絡的定位技術,集群定位算法。
室內定位測量原理
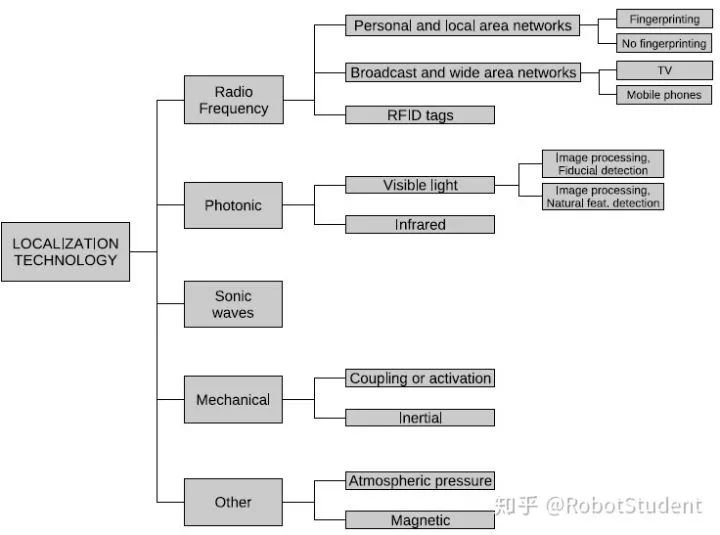
無線電頻譜與電磁波
(1)個人或區域互聯網,包括IEEE 802.11, Ultra-Wideband (UWB),ZigBee, 或者 Bluetooth。
采指紋基定位方法
鄰近技術
貝葉斯統計匹配
極大似然估計
關聯判決(Correlation discriminant kernel selection)
非采指紋基定位方法
幾何學
(2)區域廣播網絡,包括定位目的的網絡,例如GPS/GNSS,以及具有定位功能多的網絡,例如智能手機網絡、電視廣播信號。
電視信號
(3)RFID 標簽 (4)雷達 光子能場 (1)圖像分析,自然特征提取與識別(場景圖片)
移動相機系統
固定相機系統
(2)圖像分析與特征點標記(二維碼定位)
此外,還有聲波、機械能(慣性/接觸)、地球磁場、大氣壓。
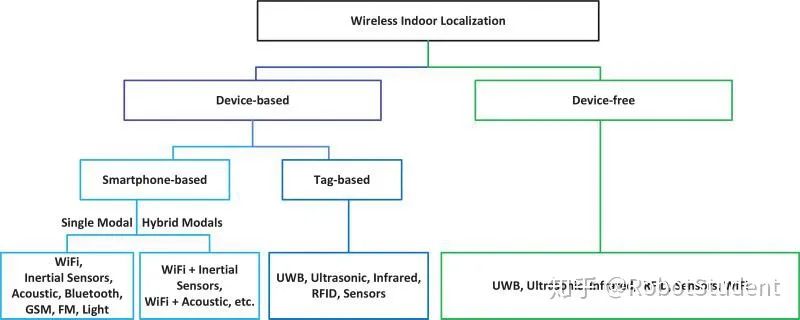
無線電室內定位系統分類[2]
室內定位技術
室內定位服務系統Indoor Location Based Services (ILBS)可以簡單地分為三類[3]:
1、網絡系統:基于無線網絡
2、慣性系統:機載慣導系統預估定位
3、混合系統:融合無線網絡與慣性系統的混合系統
RSS-IMU 混合系統
基于地圖的混合系統
基于智能手機的混合系統
室內定位模擬方法分類
1、angle of arrival(AoA) 技術:根據到達信號角度
2、time of arrival(ToA) 技術:根據到達信號時間(類似雷達測距)
3、fingerprinting 技術,即特征技術
 ? ?
? ?
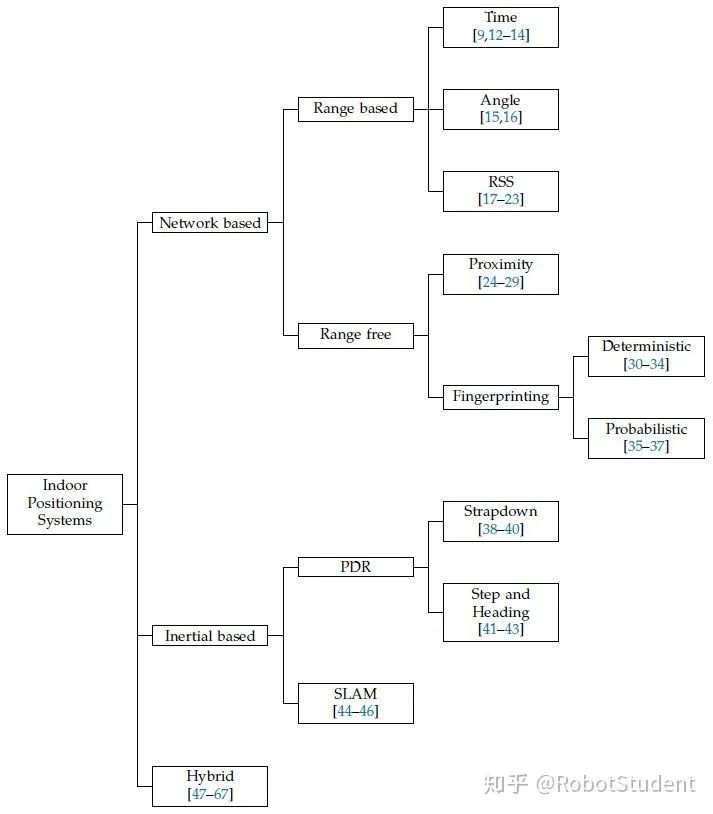
室內定位模擬算法
1、三角定位(Triangulation),需要借助固定基站或者已知基站位置信息,GPS等無線網絡定位法。
2、鄰近(Proximity), 使用具有有限的感知范圍和分析能力的傳感器,RFID。
3、場景分析(Scene analysis),利用場景畫面中的特征完成定位分析,點云和3D重構技術,機器視覺。
4、航位推算(Dead reckoning),基于先驗信息推算出運動軌跡,慣導、捷聯慣導。
定位算法
按照文獻[5],基于靜態傳感器節點的定位技術廣泛應用于移動機器人跟蹤功能,定位算法可總結為:
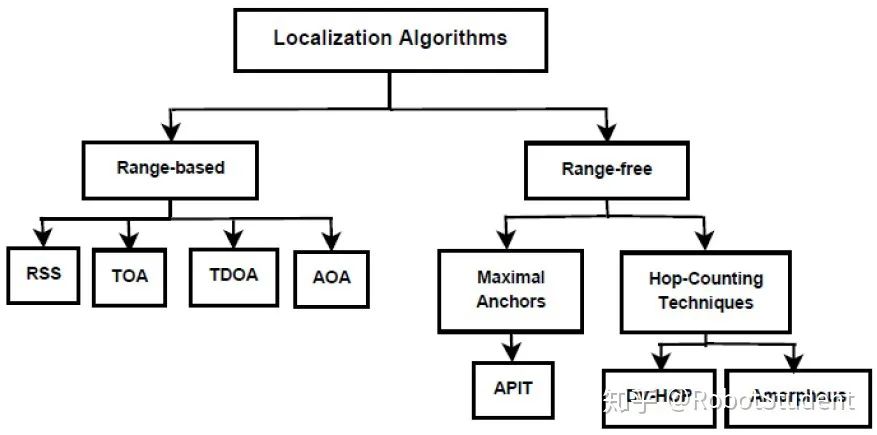
1、范圍基定位(Range-based localization)
time-of-arrival (TOA) – based 定位. 聯合最小二乘估計the Least-Square Estimate
time-difference-of-arrival (TDOA) – based 定位. 協同定位
Angle-of-arrival (AOA) – based 定位.
received signal strength (RSS) – based 定位,聯合最大似然估計Maximum likelihood estimate
MDS Based 定位,聯合奇異值分解 Singular Value Decomposition (SVD)
Channel Impulse Response Based fingerprinting 定位
2、無范圍基定位(Range-free localization)
Approximate Point in Triangle Test (APIT)
Centroid-based 定位
Monte-Carlo 定位
DV-Hop based 定位
Closer point based 定位
Based Coordinates (ABC) localization method
定位計算補償方法Implementation methods
1、機器學習方法Machine Learning Based Methods:
least square support vector machine and Gaussian processes ,Semi-supervised Laplacian regularized least squares method and HMM based RSS-EKF (Extended Kalman Filter) method using RSS
2、集中和分布式方法Centralized and Distributed Methods
3、多傳感器數據融合方法Multi-Sensor Data Fusion Methods
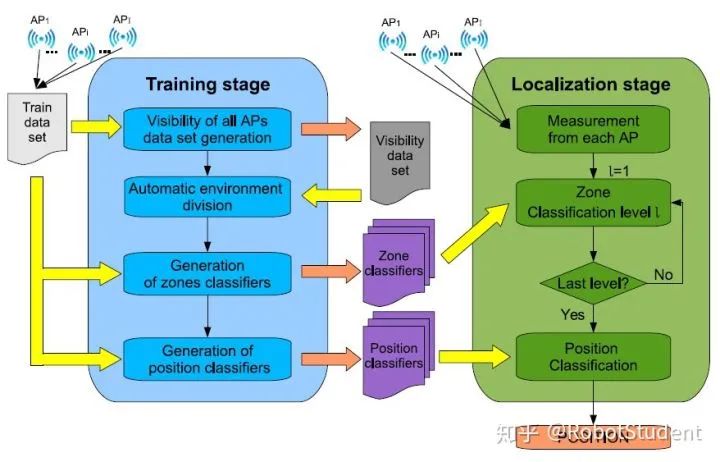
4、采指紋方法Fingerprinting Based Methods
跟蹤算法分類(Broad classification of tracking methods):
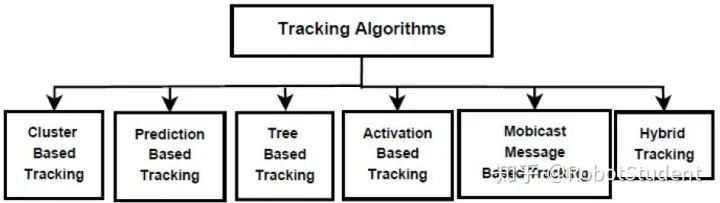
1、聚類跟蹤算法Cluster-based tracking methods, dynamic clustering algorithm for target tracking
2、預測跟蹤算法Prediction-based tracking methods
3、樹基跟蹤算法Tree-based tracking methods
4、主動跟蹤算法Activation-based tracking method
5、Mobicast基跟蹤算法Mobicast-based tracking method
室內定位方法評價
1、精度與誤差
2、環境適應性。場景對定位系統測量精度影響,一個高性能框架能夠避免對重復定位差異
3、消耗:帶寬、壽命、能耗、權重與額外設備
4、基站數量
基于慣導的定位系統
慣性導航與定位技術可以分為兩類:
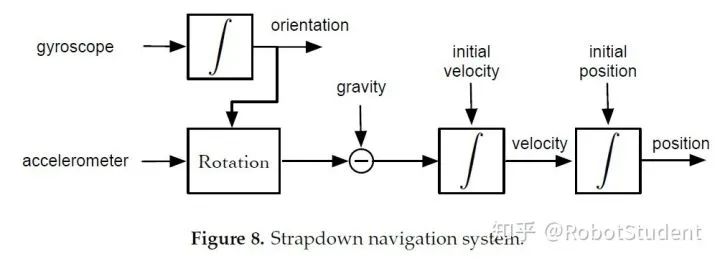
捷聯慣導系統Strapdown systems: 采用兩次積分預測運動
步進與航向系統Step and Heading Systems (SHS): 通過表示步進長度與航向的慣性定位向量預測位置
參考下圖,慣導定位系統通過二次積分獲得定位信息[6]
一個經典的具有定位功能的移動機器人控制系統架構如下圖所示,該系統通過無線電、里程計以及慣性測量單元實現自定位功能[7]。
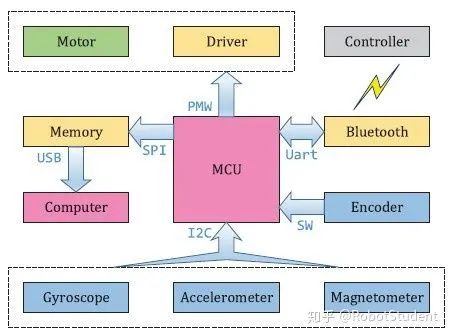
微型慣性測量單元,包括陀螺儀、加速度計、磁偏角計、溫度和氣壓等功能,通過物理模型和誤差模型推算。
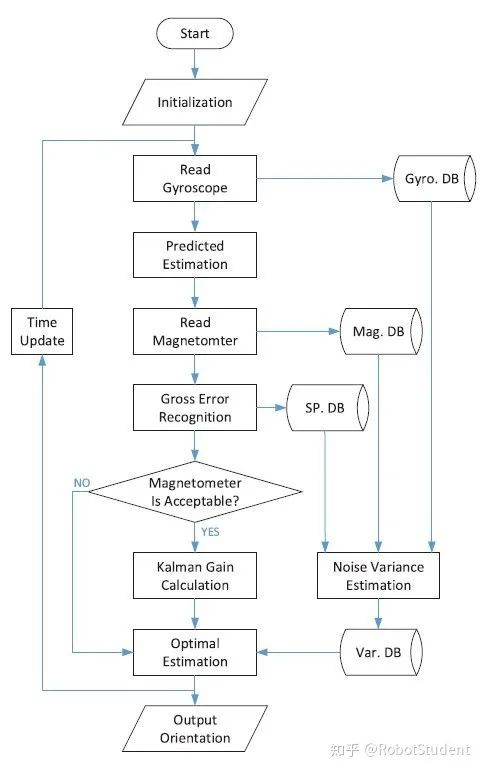
擴展卡爾曼濾波算法EKF與粒子濾波器是移動機器人群體定位中最為廣泛,尤其在RoboCup等機器人大賽[7]。
基于無線電定位系統
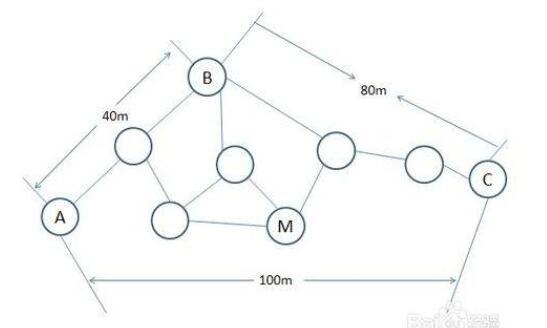
最流行的室內無線電點位技術方法為RSSI定位算法,是采用AP終端設備組件的網絡,通過檢測信號功率推算距離,再利用定位模型獲取定位信息,最常見的終端是ZigBee。
參考[8]
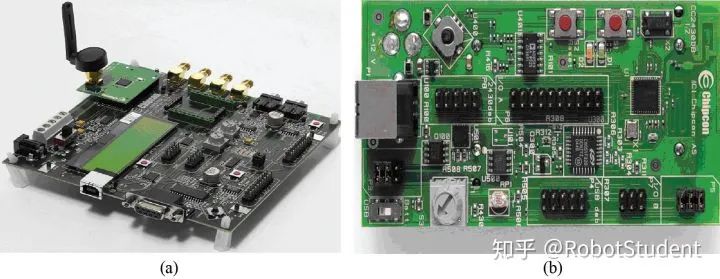
基于ZigBee組件的微型定位系統
集群定位系統
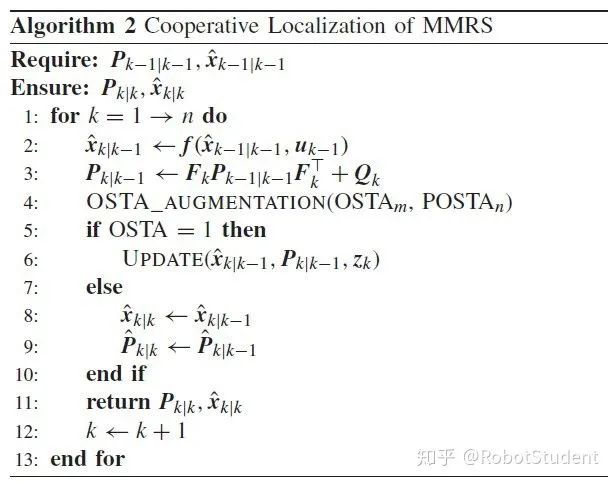
參考文獻[9][10],集群類機器人定位技術,不僅可以依靠靜態基站進行定位,還可以利用機器人之間無線電終端輔助其它終端進行定位。
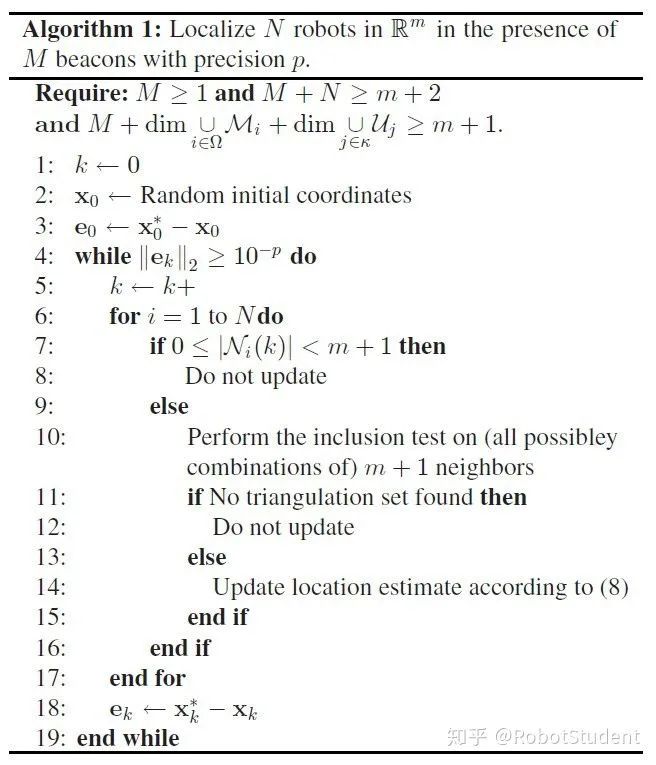
算法1 [9]
因為集群定位存在很大的噪聲干擾,因此需要對采集到的信息進行去噪處理,或者提高系統抗干擾能力,采用統計算法提高定位系統精度。如在文獻[10],采用了卡爾曼濾波器對定位優化。
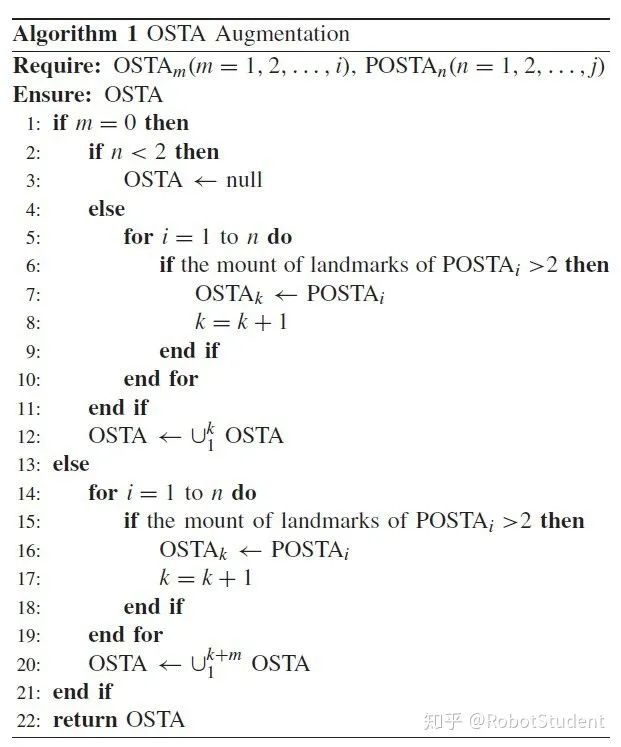
文獻[10]-算法1
文獻[10]-算法2
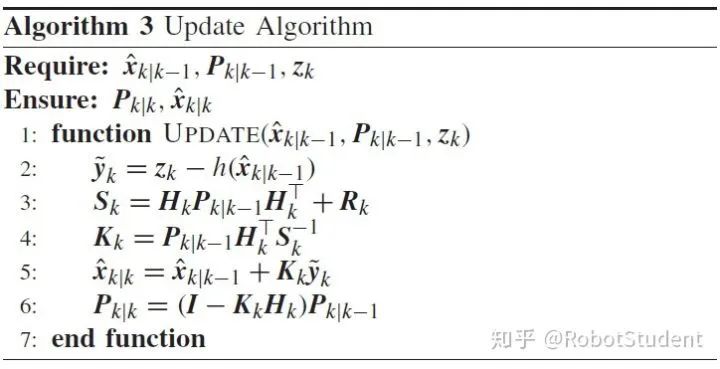
文獻[10]-算法3
總結
本文大部分內容是根據綜述文章對現用的室內定位進行總結,考慮到微型運動機器人的工程成本以及計算力,本文所討論的室內定位技術并不是應用于自動駕駛的SLAM和VSLAM技術。
同時,本文提到了定位跟蹤技術,在尋跡控制中個人傾向采用視覺方向。對于粗精度的定位系統,可以采用基于ZigBee的RSSI定位系統,此外可以融合IMU單元提高系統定位精度。
-
傳感器
+關注
關注
2564文章
52668瀏覽量
764305 -
定位技術
+關注
關注
7文章
298瀏覽量
25791 -
無線網絡
+關注
關注
6文章
1462瀏覽量
66701
原文標題:移動機器人室內定位技術綜述
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
無線傳感器網絡定位技術綜述
無線傳感器網絡的節點定位怎么解決?
無線傳感器網絡中節點的自身定位算法分析
具有聲定位功能的無線傳感器網絡節點設計
無線傳感器網絡的節點自定位技術
無線傳感器網絡中節點的自身定位算法分析


基于無線傳感器網絡的車載節點定位

如何使用可靠信標和節點度估計距離進行無線傳感器網絡定位算法的說明





 工商網監
工商網監
評論