") KUKA機(jī)器人視覺抓取的工作原理
KUKA機(jī)器人視覺抓取的工作原理
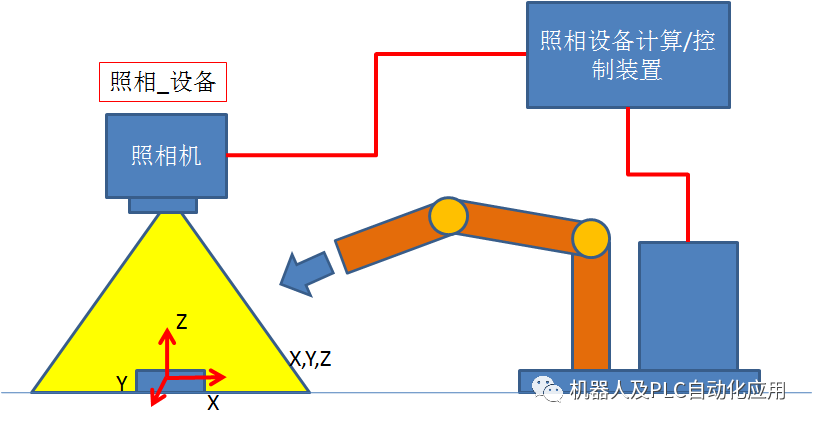
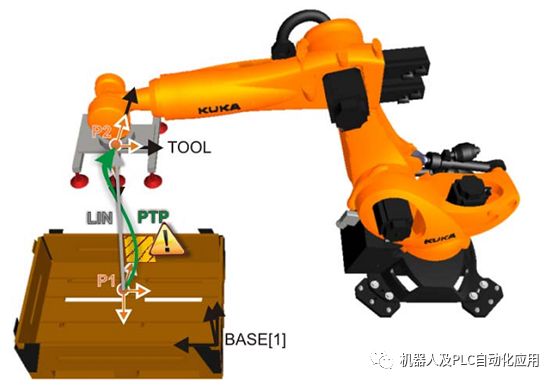
首先要建立機(jī)器人的軌跡,作為基礎(chǔ)機(jī)器人編程軌跡.
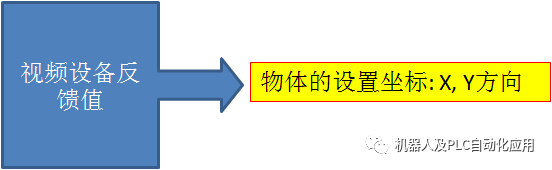
視覺抓取主要是通過改變機(jī)器人的TOOL坐標(biāo)系或BASE坐標(biāo)系來實(shí)現(xiàn)的.
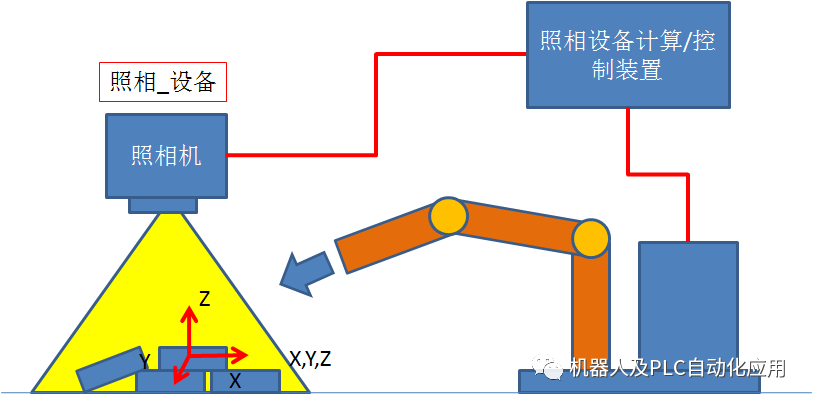
物體位置的變化主要是它位置的X,Y,Z 方向的變化.
BASE坐標(biāo)系:可根據(jù)需要定義用戶坐標(biāo)系。 當(dāng)機(jī)器人配備多個(gè)工作臺(tái)時(shí),選擇用戶坐標(biāo)系可使操作更為簡單 。在用戶坐標(biāo)系中, TCP 點(diǎn)將沿用戶自定義的坐標(biāo)軸方向運(yùn)動(dòng)。
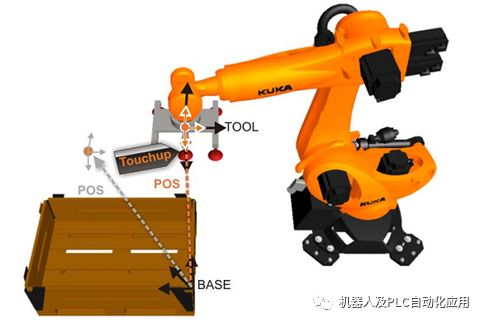
以改變BASE 坐標(biāo)系為例:
KUKAC4 現(xiàn)在可以使用32個(gè)BASE 坐標(biāo)系
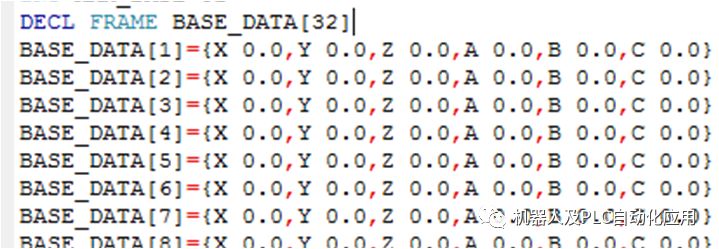
沒有使用視覺補(bǔ)償功能時(shí),只用一個(gè)BASE坐標(biāo)系.
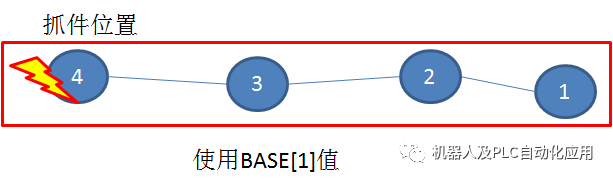
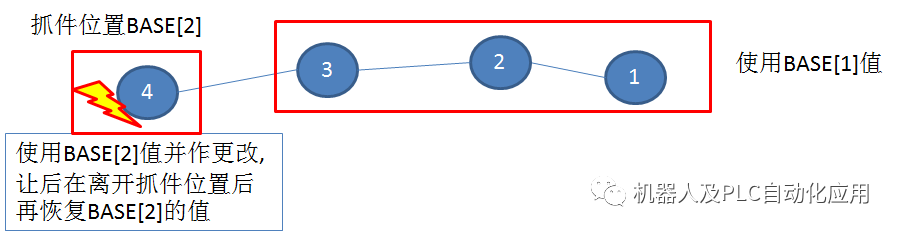
改變機(jī)器人BASE坐標(biāo)系值從而改變機(jī)器人抓件位置,使用多個(gè)坐標(biāo)系.
審核編輯:湯梓紅
-
機(jī)器人
+關(guān)注
關(guān)注
212文章
29200瀏覽量
210721 -
TCP
+關(guān)注
關(guān)注
8文章
1394瀏覽量
80048 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
16797
原文標(biāo)題:KUKA 機(jī)器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
機(jī)器人視覺——機(jī)器人的“眼睛”
KUKA重型機(jī)器人
工業(yè)機(jī)器人的工作原理
KUKA機(jī)器人問題解答
【MYD-CZU3EG開發(fā)板試用申請(qǐng)】基于機(jī)器視覺的工業(yè)機(jī)器人抓取工作站
【瑞芯微RK1808計(jì)算棒試用申請(qǐng)】基于機(jī)器視覺的工業(yè)機(jī)器人抓取工作站
工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺(tái)介紹
機(jī)器人搬運(yùn)碼垛工作站介紹
KUKA機(jī)器人伺服驅(qū)動(dòng)模塊維修
KUKA機(jī)器人視覺抓取的工作原理講解
KUKA機(jī)器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
KUKA機(jī)器人視覺抓取的工作原理
淺談機(jī)器人視覺抓取的目的
基于視覺的機(jī)器人抓取系統(tǒng)設(shè)計(jì)

基于視覺的自主導(dǎo)航移動(dòng)抓取機(jī)器人搭建方案
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論