 基于正態分布變換(NDT)的實時三維SLAM方法
基于正態分布變換(NDT)的實時三維SLAM方法

01簡介
礦井救援機器人在執行災后探測救援任務時,巷道空間的準確描述和自定位是一個關鍵問題。在復雜的巷道環境中,特別是災害發生后,三維同時定位與地圖構建(SLAM)是一項有效但時間緊迫且極具挑戰性的任務。本文提出了一種新的基于正態分布變換(NDT)的實時三維SLAM方法,該方法利用姿態圖優化和回環檢測來進一步提高mapping的一致性。我們創新地提取巷道中的地板和墻壁作為平面節點來構建地標約束,此外還通過無損檢測應用激光雷達里程計中的姿態節點。
配備多傳感器的煤礦救援機器人(CMRR)可以檢查事故現場并重建與災區的通信。聲音、圖像、溫度、氣體濃度等數據也可以傳輸到指揮中心,以便制定救援策略。但是,煤礦巷道環境復雜,場景不可預測,現有的機器人定位方法有限。煤礦災害導致先驗的路標和地圖不再可靠,GPS也無法到達現場,在災后電力中斷的情況下,其他依賴基站的無線定位方法也無法使用。基于航位推算的機器人姿態估計由于在粗糙地形上、特別是在旋轉情況下的累積誤差,無法提供精確的長期估計。目前,大多數煤礦救援機器人(CMRR)都是基于視頻進行遠程操作和定位,但這限制了機器人的運動范圍和安全性。
本文利用里程計和回環檢測的方法,建立了一種輕量級、有效的環路檢測方法,以構建全局一致的地圖。在公共數據集上對該方法進行了評估,并在礦井下進行了現場試驗。結果表明,該算法具有較低的計算復雜度和漂移,可為煤礦救援機器人(CMRR)提供姿態估計和環境描述,實現煤礦救援任務中的遙控輔助和自動導航。
02方法
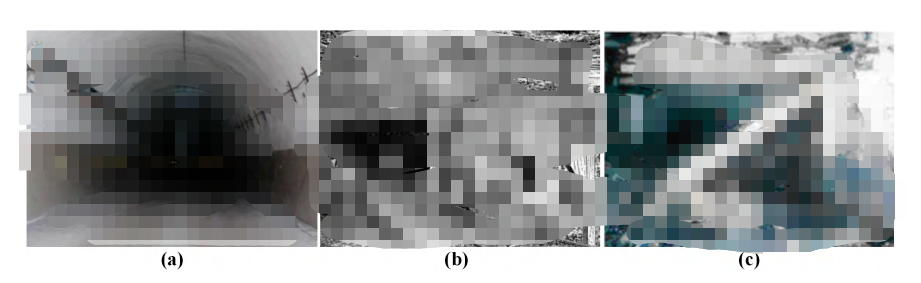
圖1 煤礦井下典型環境(a)主巷;(b)采煤工作面附近半構造環境區域;(c)混亂場景
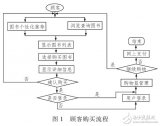
我們的工作是基于無損檢測方法來構建激光雷達里程計。與尋找點、線、面等相關特征的ICP及其變體不同,無損檢測使用范圍掃描來描述環境模型。將空間劃分為單元,并分配正態分布來表示測量空間的概率模型。數據掃描中的點與模型掃描中的一系列分布相匹配。所提出的算法框架如圖2所示。
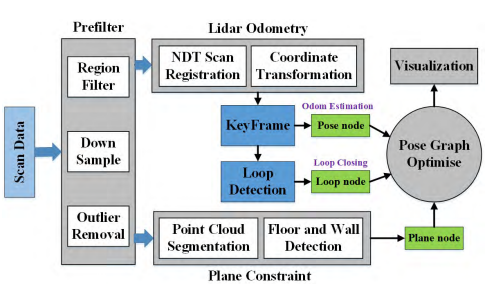
圖2 系統概述,顯示所有步驟執行的預濾波器,激光雷達里程計,約束,并與姿態圖形優化線程閉環
為了處理一個數據集中的多個模型,在迭代RANSAC之前,利用點云表面的法線方向進行特征濾波。RANSAC用于檢測平面的目標點云僅限于法線方向距離垂直法線或水平法線在一定閾值范圍內的目標點云。如果濾波后有足夠的點,則進一步使用迭代RANSAC進行平面檢測。在真實環境中,特別是結構化礦井中,我們要檢測的平面地標通常是側壁或地面,它們通常是相互垂直的。特征濾波可以減少RANSAC中處理的點,加快平面地標的提取速度。圖3給出了使用上述方法對平面點分段的直觀解釋。
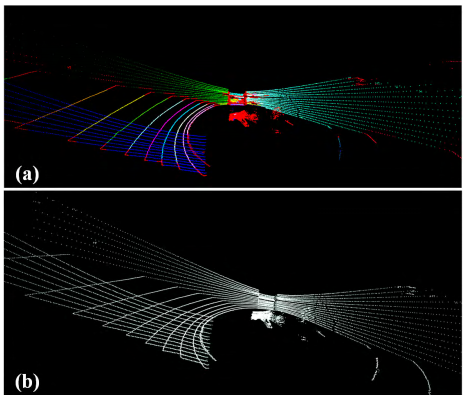
圖3利用迭代RANSAC對平面點進行掃描分割(a)將藍、綠、青色點建模為平面特征,并將不同顏色的地基準點建模為平面特征,紅色的點被特征過濾器過濾(b)掃描的原始點云
03實驗及驗證
初始測試采用在SLAM社區廣泛用于算法評估的KITTI odometry基準。圖4描繪了基準測試使用的平臺和數據集中的典型場景。該平臺包含Velodyne HDL-64E 3D激光掃描儀和OXTS RT3003慣性和GPS導航系統等。現實世界的場景包括有建筑物的城市環境、有周圍植被的鄉村環境和有開放場景的高速公路。由于KITTI測程基準已經糾正了激光雷達數據收集中的點畸變,因此在實驗中使用了原始數據集。該算法在CPU: i7-3555LE (2.5 GHz, 4核)和8G內存的IPC上運行。
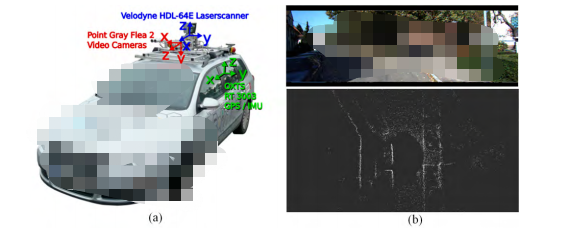
圖 4 (a) KITTI基準使用的平臺(b)真實場景及其對應的點云。
圖5是基于無損檢測的圖SLAM的建圖結果。可以看到,點云是一致的,高建圖質量。得益于環路檢測和圖形優化,該地圖與真實場景極為吻合。地圖在保證地圖精度和細節的同時節省了點云的存儲空間
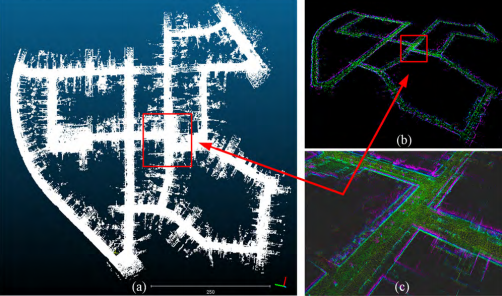
圖5(a)(b)表示序列00上構建的點云圖(b)(c)不同點的高程(c)城市場景中一個十字路口的近景
從圖6的軌跡可以看出,在序列00、05和07中,LeGO-LOAM在準確性和一致性方面表現最好。這些序列都在居民區和城市道路中,包含了許多環境中的線和平面特征。在所有序列上,該算法在與地面真值的一致性和符合性方面都優于ICP-graph-SLAM和NDT-Odometry方法。與NDT-Odometry相比,得益于環路檢測和優化過程,該方法的姿態估計不會沿路徑發散。
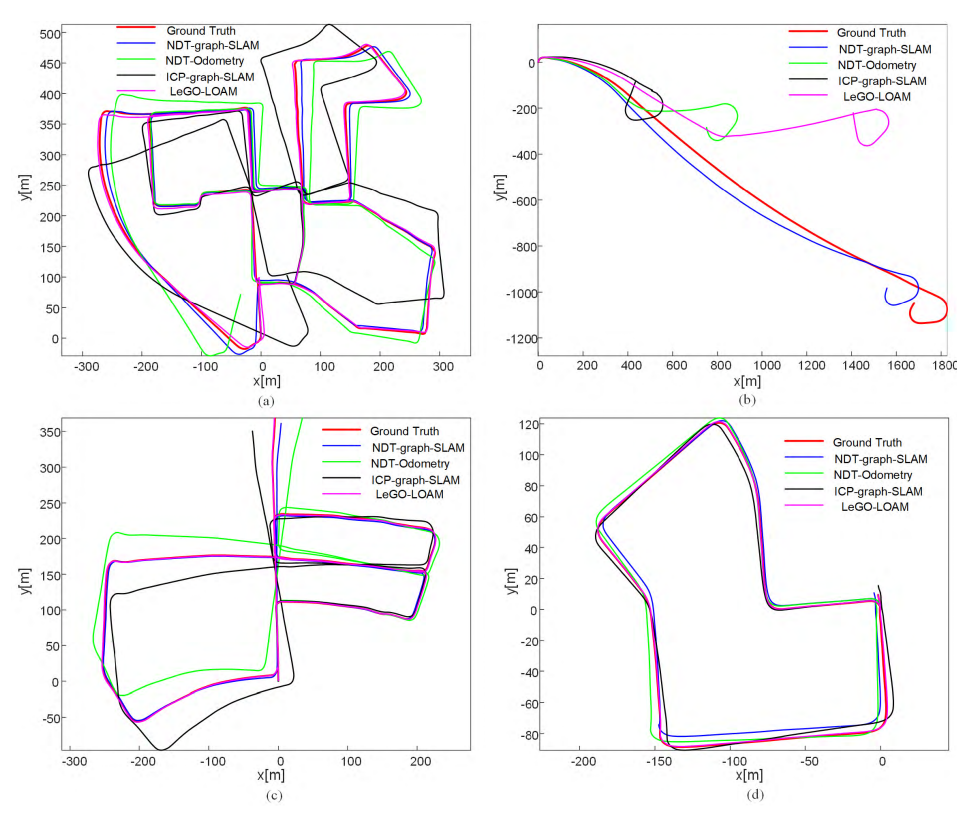
圖6 NDT-graph-SLAM(藍色),NDT-Odometry(綠色),ICP-graph-SLAM(黑色),(a)有環00序列,(b)無環01序列,(c)有環05序列,(d)有環07序列
在之前的工作中,設計了一種多驅動履帶式行走機構,以保證CMRR在處理復雜地形時的高機動性。圖8為新一代CMRR系統,一個具有多個感知傳感器的防爆移動平臺。該系統配備了獨立的傳感器套件,包括3D掃描激光雷達(rslidar-16,12V/9W)、電機驅動旋轉2D激光雷達(UTM-30LX, 12V/8.4W)、IMU (Xsens Mti-G-710,在套件中)和RGB-D攝像頭(Xtion Pro Live,由USB2.0接口供電)。所有傳感器通過電源和網線的物理隔離連接到移動平臺。該套件采用阻燃抗靜電材料制成,滿足煤礦應用要求。在這項工作中,只使用3D激光雷達進行SLAM工作。
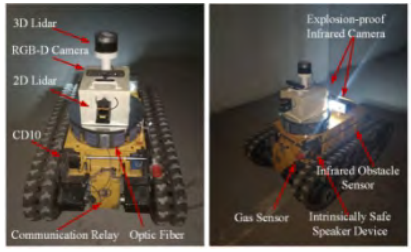
圖8 新CMRR系統
在充分模擬地下礦山環境的中國礦業大學瓦斯爆炸實驗室進行了現場試驗。圖9的俯視圖是通過我們的SLAM算法生成的。導線從A點開始,繼續到B、C、d點,然后機器人從C、B、E點返回,在A點形成一個小環路。最后,機器人穿過F、G點,在h點停止。有四個連接點(A、B、F、G),只有從A點到C點的區域被照亮。它構成了一條長約200米,寬約2.5米的狹長的巷道,從C到D,有輕微的曲率,沒有照明。F-G部分為變寬巷道,其中一條巷道寬度4.75 m,長度15 m;另一個寬2.5米,長55米。從G到H區域為向下傾斜的巷道。圖10是圖13中從B到C、A點、F到G、G點分別生成的四張局部地圖和照片。
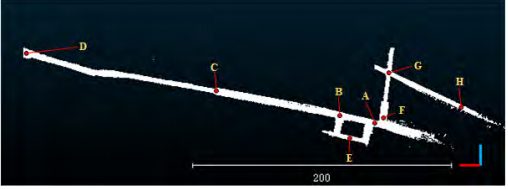
圖10 NDT-SLAM生成的地圖俯視圖,包含多個掃描姿勢。機器人從A點開始,按照這個順序A- b - c - b - d - c - b - e -A- f - g - h。在A、C、D、F、G交叉處設置固定反射標記
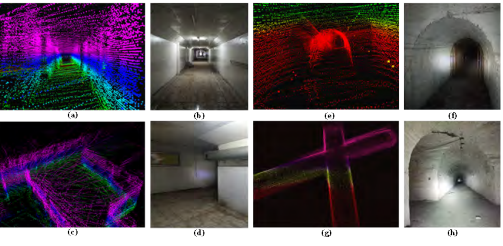
圖11現場測試生成的地圖及其實際位置
04結論
這篇論文提出了一種具有閉環和圖優化功能的三維激光SLAM算法,通過采用3D-NDT構建激光雷達測距約束和迭代RANSAC提取地標平面,提高了建圖的一致性和定位的魯棒性。同時,通過檢測關鍵幀之間的外觀相似度和距離實現輕量閉環,并采用多線程加速提高計算速度以滿足實時應用。
這篇論文對于撰寫建造機器人的SLAM應用綜述有以下幾點啟示:
(1)了解不同的SLAM算法:通過研究不同的SLAM算法,特別是具有閉環和圖優化功能的算法,可以深入了解SLAM技術的發展和應用。
(2)關注傳感器融合:考慮多傳感器的融合,如將IMU和紅外視覺等傳感器結合起來,可以提高在退化環境中的精度性能。
(3)實地測試和評估:通過在實際環境中進行測試和評估,可以驗證SLAM算法在特定應用場景中的有效性和適用性。
(4)解決特定環境中的問題:針對特定環境中定位方法有限的問題,可以探索基于無損檢測的多傳感器集成定位方法,以提高精確定位的能力。
責任編輯:彭菁
-
機器人
+關注
關注
213文章
29583瀏覽量
212036 -
三維
+關注
關注
1文章
517瀏覽量
29395 -
SLAM
+關注
關注
24文章
437瀏覽量
32403 -
激光雷達
+關注
關注
971文章
4214瀏覽量
192314
原文標題:基于高效激光的煤礦救援機器人三維SLAM
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何使用labview根據XYZ坐標實時繪制三維曲線
三維觸控技術突破“二向箔”的束縛
三維快速建模技術與三維掃描建模的應用
廣西掃描服務三維檢測三維掃描儀
三維設計應用案例
基于OpenGL三維物體建模方法的研究與實現
基于雙目立體視覺的三維拼接和融合方法
基于三維激光數據的層級式SLAM方法

智慧城市_實景三維|物業樓三維掃描案例分享_泰來三維


三維高斯潑濺大規模視覺SLAM系統解析






 工商網監
工商網監
評論