") 基于RT-Thread的開源自駕儀FMT正式版v1.0.0即將發(fā)布!
基于RT-Thread的開源自駕儀FMT正式版v1.0.0即將發(fā)布!
FMT(全稱Firmament Autopilot)是首個基于模型設(shè)計的開源自駕儀系統(tǒng)。自2016年立項以來的近七年的時間里,F(xiàn)MT持續(xù)完善,經(jīng)過了數(shù)千次Commit。
現(xiàn)在,F(xiàn)MT正式版v1.0.0馬上就要發(fā)布了!
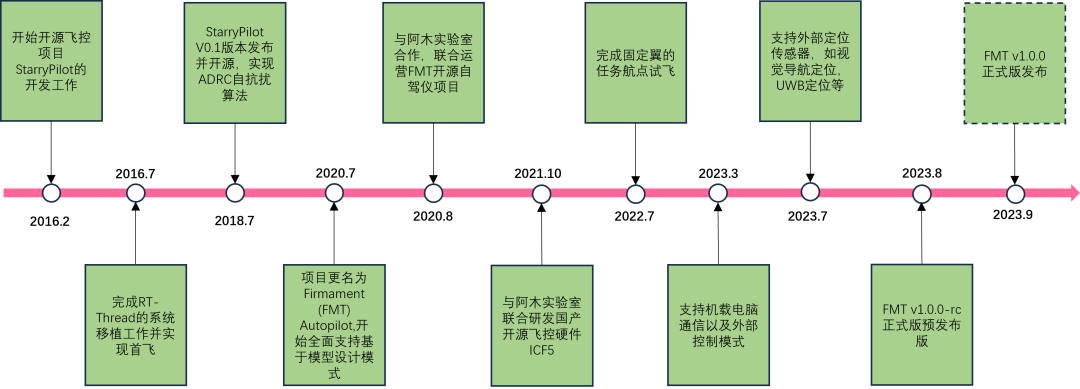 FMT開源項目重要時間節(jié)點
FMT開源項目重要時間節(jié)點
什么是 FMT?
Firmament (FMT) 是一款基于模型設(shè)計 (Model Based Design, MBD) 的開源自駕儀,可被用來快速構(gòu)建無人機,車,船,機器人等的無人控制系統(tǒng)。基于模型設(shè)計已經(jīng)被廣泛應(yīng)用于汽車制造、航空航天等行業(yè),當(dāng)前采用基于模型設(shè)計模式開發(fā)的飛控系統(tǒng)鳳毛麟角,而 FMT 就是為此而誕生。FMT結(jié)合當(dāng)前最先進(jìn)的基于模型設(shè)計和3D仿真技術(shù),構(gòu)建了從嵌入式軟件,建模與仿真三位一體的軟件開發(fā)平臺,致力于打造下一代的開源自駕儀系統(tǒng)。
FMT支持開源硬件平臺
在正式版發(fā)布之前,我們將先上線包含了正式版全部功能的候選版本v1.0.0-rc,方便大家了解和學(xué)習(xí)的同時,我們也希望更多的開發(fā)者參與測試。我們也將基于候選版本進(jìn)行大量測試,同時我們也將根據(jù)測試結(jié)果和開發(fā)者們的反饋對候選版本進(jìn)行最后的優(yōu)化。
FMT作為一個年輕的開源項目,有了開發(fā)者們的鼎力支持才能更快成長。候選版本的測試過程預(yù)計將持續(xù)1個月,請開發(fā)者們多多使用和測試FMT,并歡迎提交反饋、issue、PR以及其他任何建議,我們會及時進(jìn)行處理。
對于貢獻(xiàn)突出的開發(fā)者我們將提供一個月的免費技術(shù)支持和技術(shù)咨詢服務(wù)。
正式版亮點功能
- 數(shù)千小時飛行驗證,高安全、高穩(wěn)定的自駕儀系統(tǒng)。
- 更高效,更低的CPU使用率以及內(nèi)存使用率,預(yù)留更大算力和內(nèi)存空間。
- 高實時,微秒級硬實時響應(yīng),保證算法和模塊實時性要求。
- 強大的日志系統(tǒng),具備“黑匣子”功能,支持?jǐn)?shù)據(jù)回溯和數(shù)據(jù)還原。
- 基于發(fā)布/訂閱模式的跨線程通信組件。
- 分布式參數(shù)系統(tǒng),提供強大的參數(shù)管理功能。
- 支持MavLink協(xié)議和開源地面站QGroundControl。
- 支持基于模型設(shè)計(MBD)全流程先進(jìn)開發(fā)模式,Matlab/Simulink圖形化算法建模,讓研發(fā)更高效。
- 支持Matlab/Simulink代碼自動生成,簡化算法開發(fā)流程。
- 支持跨平臺開發(fā),Win/Linux/Mac全平臺支持。
- 支持多個開源飛控硬件平臺,包括國產(chǎn)平臺ICF5,以及Pixhawk標(biāo)準(zhǔn)硬件。
- 工業(yè)級算法模型,包括導(dǎo)航系統(tǒng)(INS),飛行管理系統(tǒng)(FMS),控制系統(tǒng)(Controller),被控對象模型(Plant)。
- 自適應(yīng)抗擾動算法,可抗外界擾動和磁干擾。
- 支持完善的安全機制,控制模式降級保護(hù),失聯(lián)自動返航,遙控斷聯(lián)保護(hù),失控安全降落等。
- 支持姿態(tài)、定高,定點等常用控制模式,支持任務(wù)航點、板外控制等高級控制模式。
- 支持一鍵起飛,降落,懸停,盤旋,返航,指點飛行等功能。
- 支持ROS1/ROS2通信接口,可基于ROS開發(fā)應(yīng)用。
- 支持Offboard板外控制功能,可用于軌跡規(guī)劃和自主避障。
- 支持外部定位傳感器,包括但不限于UWB,VINS,動捕系統(tǒng)等。
- 支持多種仿真模式,如模型在環(huán)仿真(MIL),數(shù)據(jù)仿真,軟件在環(huán)仿真(SIL),硬件在環(huán)仿真(HIL),純硬件仿真(SIH)等。
- 支持AirSim,Gazebo,F(xiàn)lightGear等3D場景可視化。
- 支持多旋翼,固定翼平臺,可擴(kuò)展其他平臺,如VTOL,直升機,無人車,無人船,飛艇,潛艇,機器人等。
- 可提供到手飛整機多旋翼和固定翼飛行平臺。
- 軟件和算法全開源,可用于教學(xué),科研,商業(yè)等用途。
- 完善的文檔和相關(guān)教程。
獲取候選版本代碼的方法
FMT相關(guān)代碼托管在Github上,可以點擊閱讀原文進(jìn)行跳轉(zhuǎn)。
也可以在項目的Release頁面下載編譯好的固件。
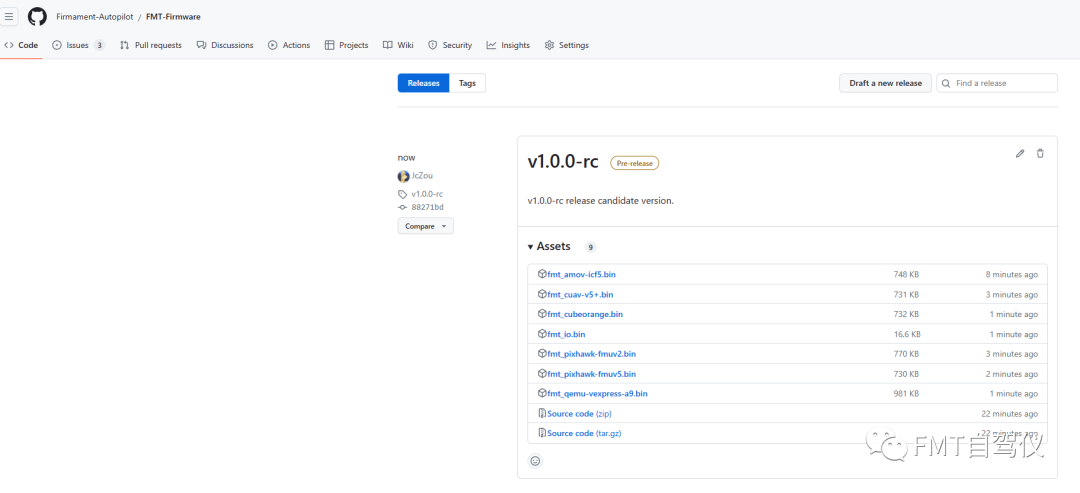
固件下載完成后,在飛控控制臺輸入boot_log應(yīng)該能看到FMT的版本顯示為v1.0.0-rc。
_______
/__(_)___________________//_
/_///__/'/_`/'/-_)_/__/
/_//_/_//_/_/_/_,_/_/_/_/__/_//_/__/
Firmware..................FMTFWv1.0.0-rc
Kernel....................RT-Threadv4.0.3
RAM.................................448KB
Target...........................Amov-ICF5
Vehicle........................Multicopter
Airframe.................................1
INSModel..................BaseINSv1.0.0
FMSModel..................BaseFMSv1.0.0
ControlModel.......BaseControllerv1.0.0
TaskInitialize:
mavobc................................OK
mavgcs................................OK
logger................................OK
status................................OK
vehicle...............................OK
提交測試反饋
大家在測試和使用中若發(fā)現(xiàn)任何問題,可以通過Github提交Issue或者PR。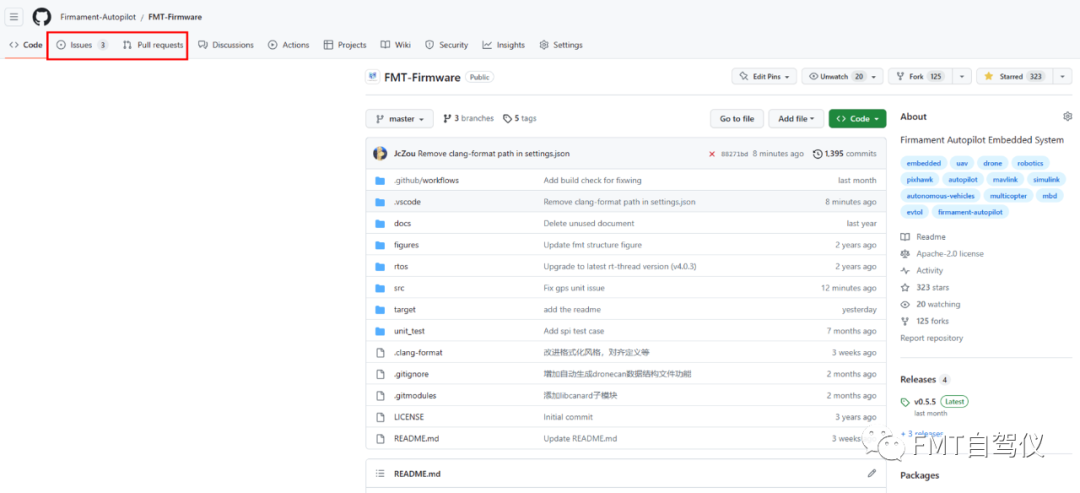
https://firmament-autopilot.github.io/FMT-DOCS/#/
若因網(wǎng)絡(luò)原因無法打開文檔,可以使用離線閱讀方式,具體請參考《FMT文檔離線閱讀》。
———————End———————
點擊閱讀原文進(jìn)入官網(wǎng)
原文標(biāo)題:基于RT-Thread的開源自駕儀FMT正式版v1.0.0即將發(fā)布!
文章出處:【微信公眾號:RTThread物聯(lián)網(wǎng)操作系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
RT-Thread
+關(guān)注
關(guān)注
32文章
1375瀏覽量
41596
原文標(biāo)題:基于RT-Thread的開源自駕儀FMT正式版v1.0.0即將發(fā)布!
文章出處:【微信號:RTThread,微信公眾號:RTThread物聯(lián)網(wǎng)操作系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
RT-Thread睿賽德開源無人機領(lǐng)域硬核飛控上線!| 產(chǎn)品動態(tài)

2025 RT-Thread全球技術(shù)大會議程正式發(fā)布!
RT-Thread審核團(tuán)招募: 深度參與開源RTOS社區(qū)治理與演進(jìn)
如何將RT-Thread移植到NXP MCUXPressoIDE上

RT-Thread榮登2024開源創(chuàng)新榜單,躋身中國十大開源社區(qū)
從開源中來到開源中去-RT-Thread北京社區(qū)篇
RT-Thread上CAN實踐
開源共生 商業(yè)共贏 | RT-Thread 2024開發(fā)者大會報名啟動!
睿賽德科技正式推出RT-Thread開源 4+服務(wù),助力企業(yè)用戶發(fā)展
新書發(fā)布——《RT-Thread嵌入式實時操作系統(tǒng)內(nèi)核、驅(qū)動和應(yīng)用開發(fā)技術(shù)》
2024 RT-Thread全球巡回 線下培訓(xùn)火熱來襲!
【好書推薦】RT-Thread設(shè)備驅(qū)動開發(fā)指南
RT-Thread內(nèi)部機制大揭秘,帶你深入操作系統(tǒng)內(nèi)核

RT-Thread 新里程碑達(dá)成——GitHub Star 破萬!
基于 RT-Thread專業(yè)版的EtherCAT主站方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論