 Profinet轉EtherCAT主站網關用西門子1200控制EtherCAT伺服。
Profinet轉EtherCAT主站網關用西門子1200控制EtherCAT伺服。
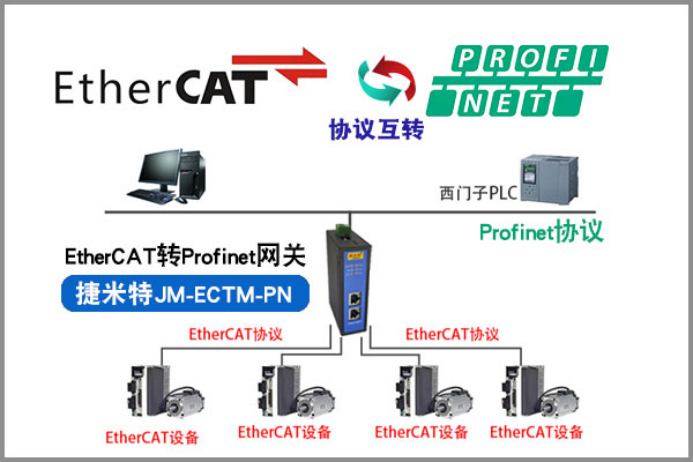
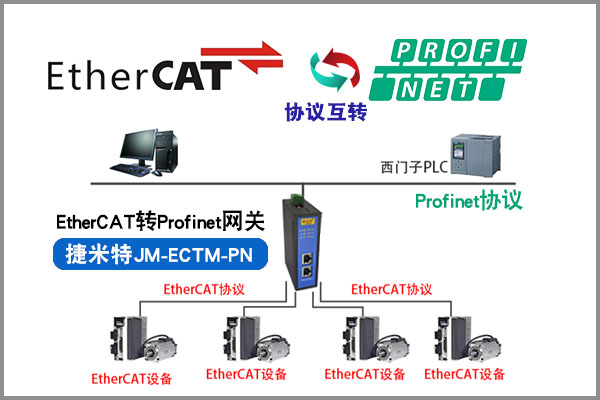
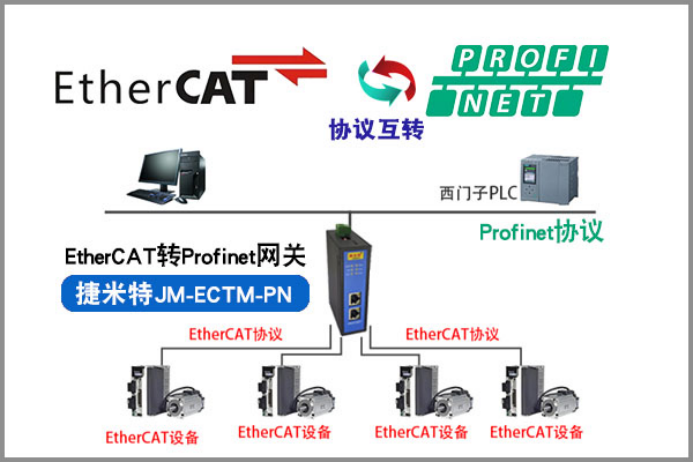
YC-ECTM-PN是PN(Profinet)轉EtherCAT網關,通過數據映射方式工作。
YC-ECTM-PN在PN側作為PN從站,接西門子PLC的Profinet口;在ETHERCAT側做為ETHERCAT主站,接ETHERCAT從站,如伺服驅動器、變頻器等。使用場景:西門子PLC使用Profinet控制ETHERCAT從站。

PN側支持PNRTRealTimeClass1,ClassAandB;ETHERCAT側支持COE。
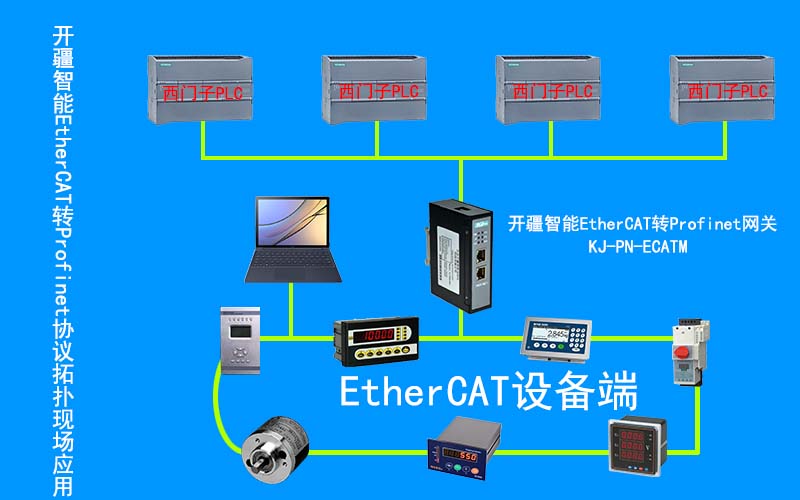
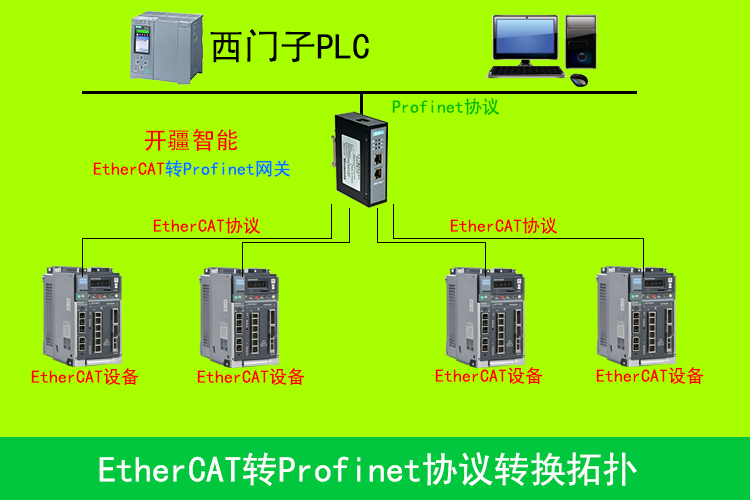
四、應用實例
實例拓撲如下圖,用西門子1200/200Smart控制ETHERCAT伺服。

匯川SV660N伺服驅動器EtherCAT部分簡介(參考SV660N手冊):
SV660N是匯川EtherCAT交流伺服驅動器。
采用的是IEC61800?7(CiA402)?CANopen運動控制子協議。僅支持DC同步模式。同步周期由SYNC0控制。
支持7種控制模式。
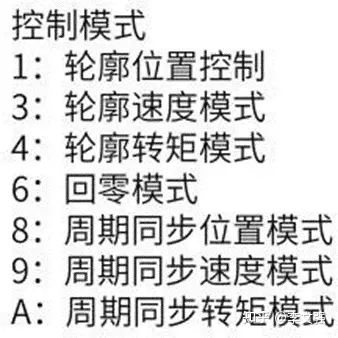
本例程采用“周期同步位置模式”,模式字為8。
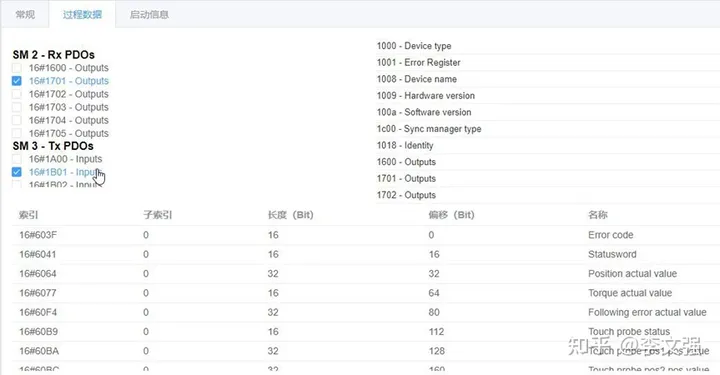
SV660N可用PDO如下:
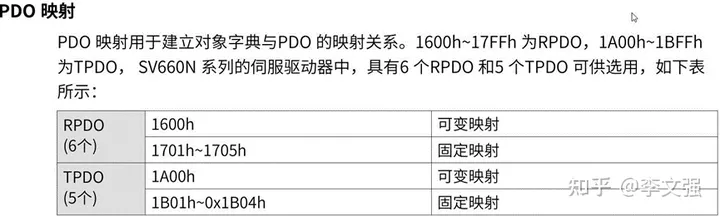
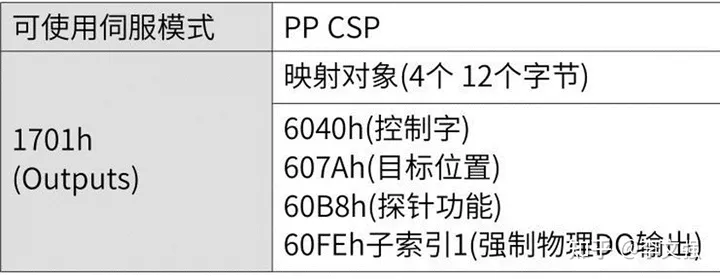
根據SV660N手冊,使用“周期同步位置模式”可以使用固定映射RPDO
0x1701和TPDO0x1B01。這兩個PDO映射參數如下圖所示:

1、連接硬件,電腦連接Config口用來配置ETHERCAT部分,電腦連接Profinet
口用來組態Profinet。EtherCAT口只用來連接伺服驅動器。
2、安裝配置軟件、拷貝xml文件、啟動配置軟件
3、在從站列表添加配置SV660N從站,在“常規”里面設置同步模式,在過程數據里面配置PDO。
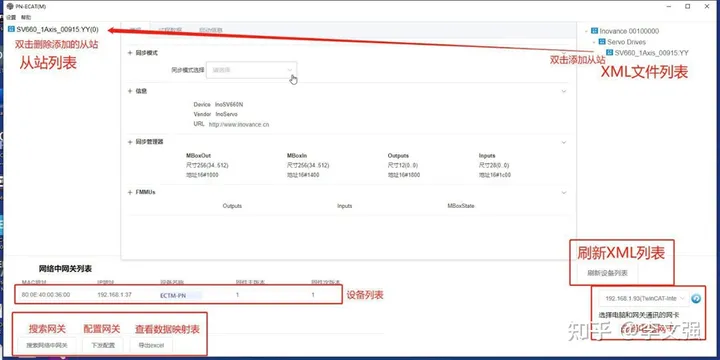
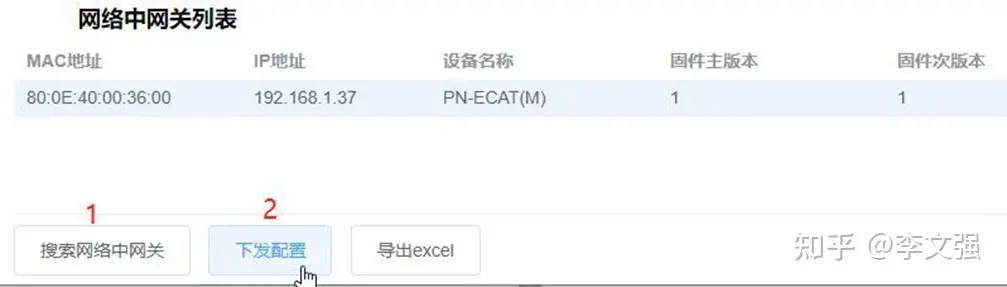
4、選擇電腦網卡,搜索并配置網關
博途v15下添加PN端設置
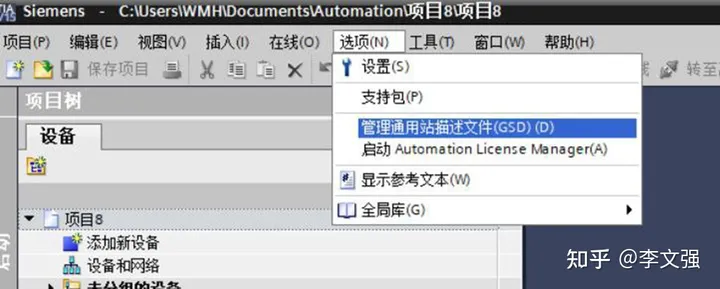
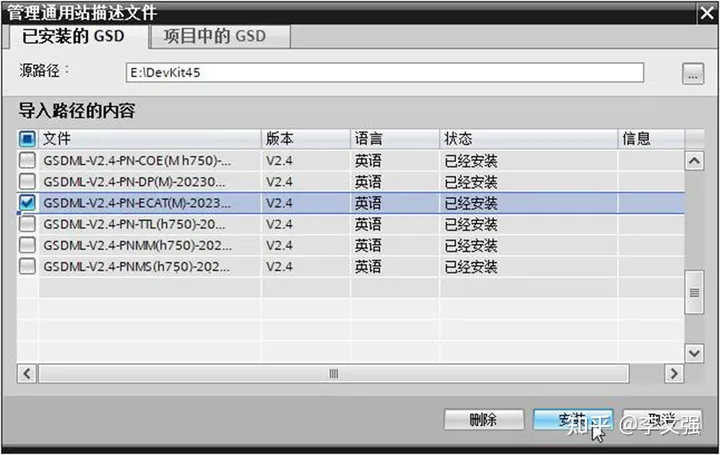
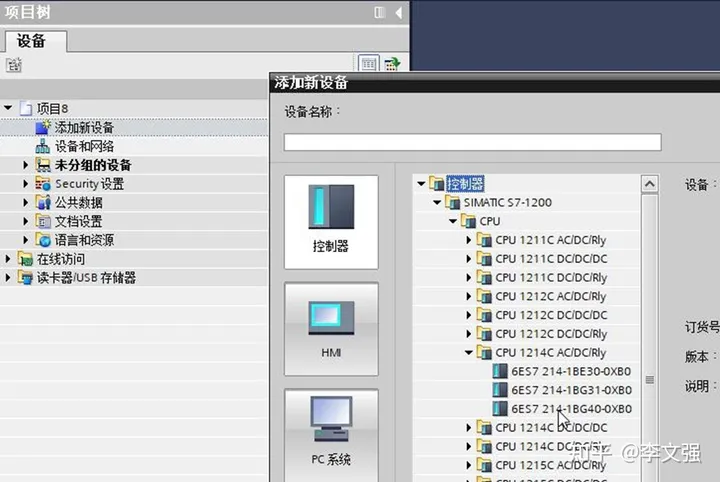
打開博途v15,點擊新建工程,輸入工程名稱,安裝GSD文件
2、添加PLC,根據現場實際PLC型號添加
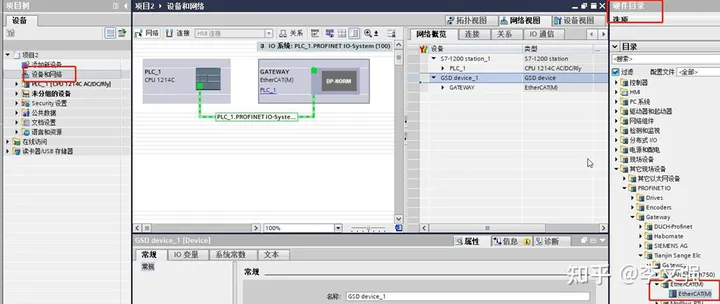
3、添加網關
4、給網關添加輸入輸出,根據導出的excel表格計算出來需要12個字節Q
和28個字節I,可以給插槽如下:
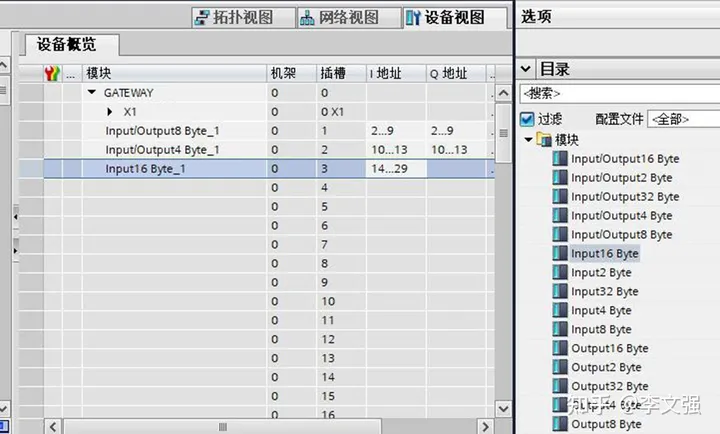
如上圖所示PN端輸出占了12個字節QB2-QB13,輸入占了28個字節
IB2-IB29。
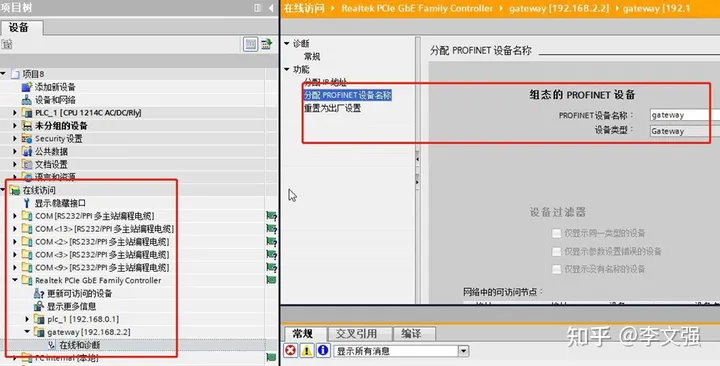
5、設置設備名稱,組態頁面和網關實際名稱要一樣
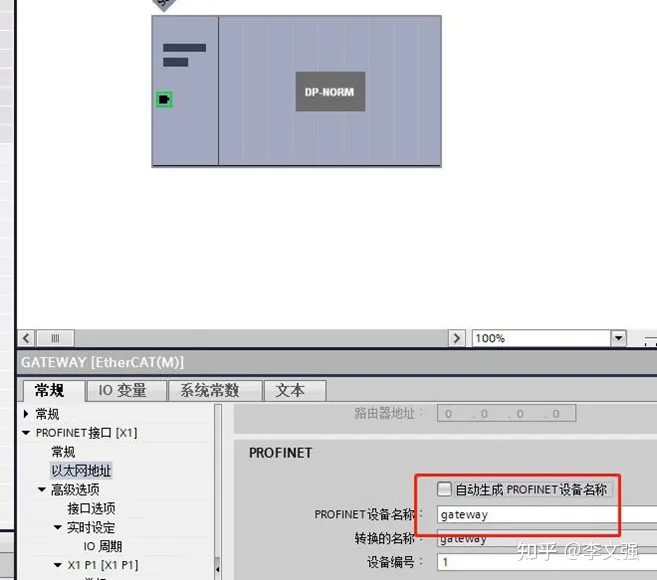
如果實際設備名稱和組態名稱不同需要修改到相同,否則無法組態成功。
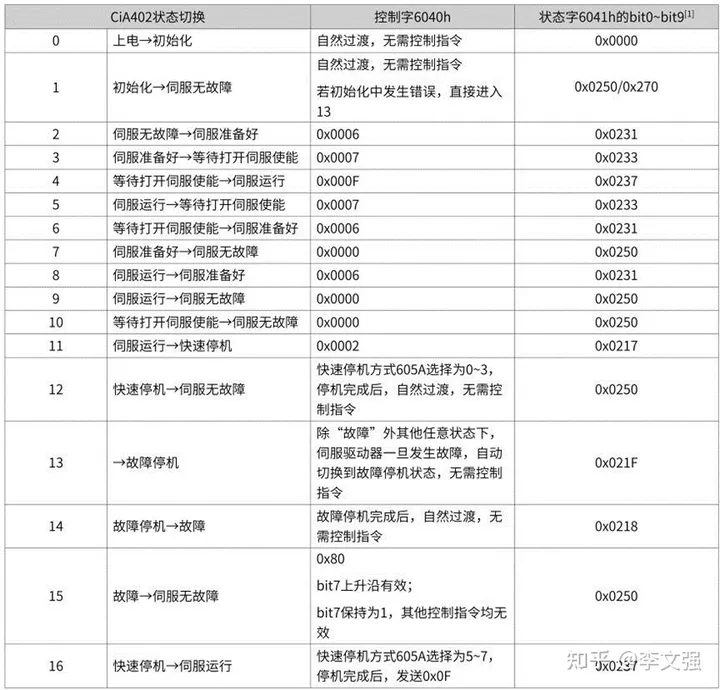
6、下載程序并建立監控表,通過CIA402規約引導伺服啟動

這里只顯示了部分對象,沒有將所有對象顯示出來。當Statusword是0x1650,所以Controlword寫入6。

當Statusword是0x1631,所以Controlword寫入7。

當Statusword是0x1633,所以Controlword寫入15。

此時Statusword是0x1637,至此,伺服已經啟動。

之后可以看到伺服當前位置Positionacutal是12,直接給目標位置Target
position一個新值1000000,寫入去,此時伺服會轉動一下,并且當前位置值變成了999998。

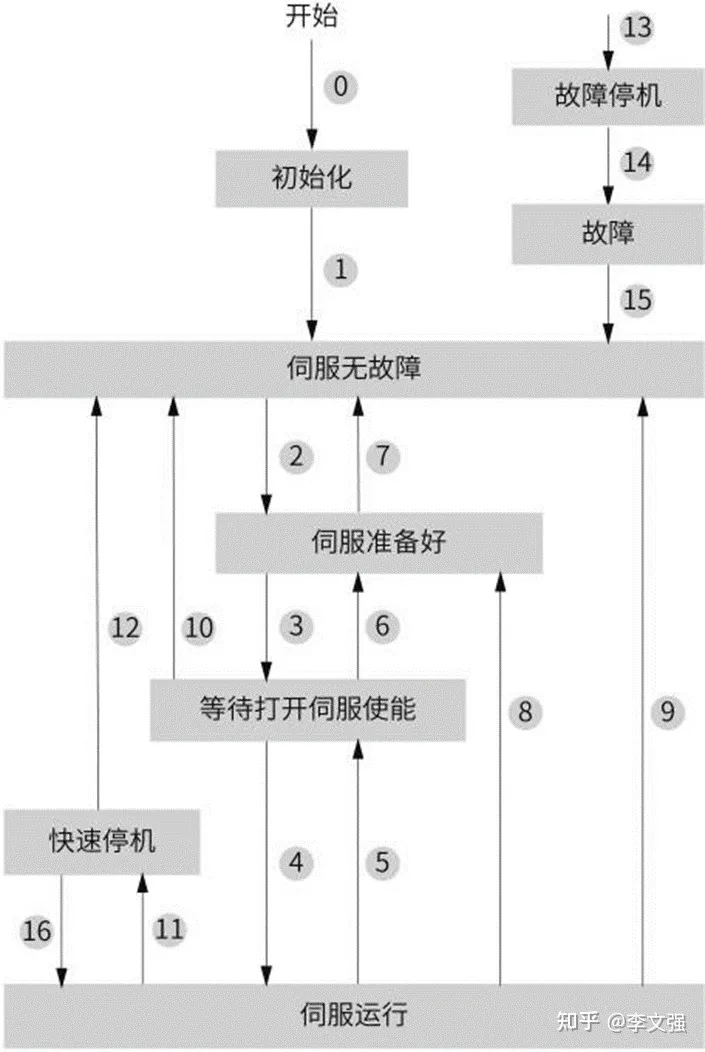
附錄:
CIA402狀態引導圖
審核編輯 黃宇
-
西門子
+關注
關注
98文章
3138瀏覽量
117819 -
Profinet
+關注
關注
6文章
1601瀏覽量
25011 -
ethercat
+關注
關注
19文章
1032瀏覽量
39673
發布評論請先 登錄
EtherCAT主站轉Profinet網關如何把匯川伺服接入到西門子plc

EtherCAT主站轉Profinet網關接IS620N伺服驅動器與西門子plc通訊案例

通信新思路:EtherCAT轉Profinet網關在自主研發機器人中的技術實踐與優化

EtherCAT轉ProfiNet西門子1200PLC與伺服電機通訊案例全解
Profinet轉EtherCAT深度解讀網關模塊如何協議轉換賦能西門子PLC與伺服驅動高效協作案例?
Profinet轉Profinet網關應用在霍尼韋爾DCS與西門子1500PLC通訊案例

基于 EtherCAT 轉 ProfiNet 網關達成西門子 1200 PLC 與伺服電機通訊連接的應用實例
代際躍升丨Modbus轉Profinet網關與伺服的智能之旅
EtherCAT轉Profinet:輕松連接西門子PLC與凱福驅動器!

EtherCAT轉Profinet:輕松連接西門子PLC與凱福驅動器!
Profinet轉EtherCAT網關模塊配置詳解
三格電子-Profinet 轉EtherCAT主站網關

博圖妙搭,EtherCAT轉Profinet網關,配置快人一步

技術實操 EtherCAT轉Profinet主網關:歐姆龍NX1P2系列PLC高效配置案例揭秘

突破壁壘,創新融合:伺服驅動借助 EtherCAT轉Profinet網關與PLC1200新方案





 工商網監
工商網監
評論