 自動駕駛功能模塊有哪些
自動駕駛功能模塊有哪些

1.1 ADS核心計算模塊(藍色塊部分)
感知模塊 - 使用傳感器數據、車輛里程計數據和后端信息(即地圖數據)來檢測和跟蹤傳感器視野內的基礎設施和對象,以產生對象、特征或規范的數據。
場景理解 - 評估當前的駕駛場景,并預測或預見動態實體相對于自主車輛的意圖和行為。
自車運動 - 使用不同的傳感器輸入估計車輛的運動,例如來自慣性測量單元(IMU)和車輪速度傳感器等的數據。
定位 - 確定車輛的位置、方位和方向。
運動控制 - 與執行器包括制動器、轉向系統和傳動裝置互動,以實現期望的軌跡。
任務控制 - 根據乘客狀態、車輛操作者請求或行為規劃器的直接反饋來維持或改變車輛任務;向操作者提供反饋。
乘客監控 - 確定車輛乘客的狀態,并識別可能需要修改任務、動態駕駛任務(DDT)和/或策略規劃(導航)的情況。
路徑規劃 - 確定車輛應該采取的到達目標目的地的路線。
行為規劃 - 在定義的路線目標內做出操縱決策(例如改變車道、超車、緊急停車等)。
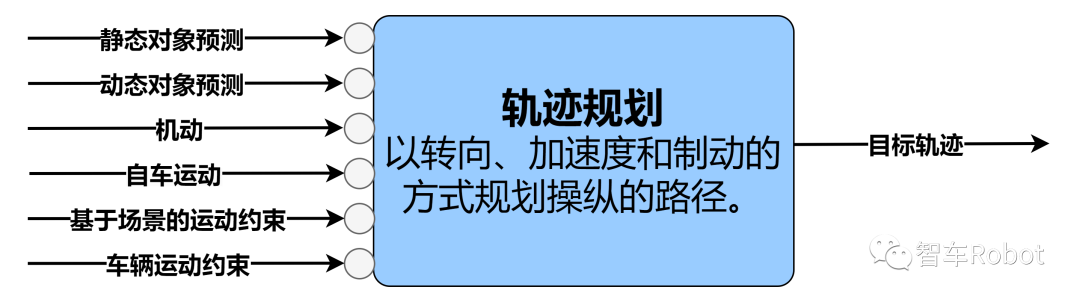
軌跡規劃 - 規劃操縱路徑并為運動控制模塊提供目標軌跡。
操作域監控 - 監控參與動態駕駛任務的實體的能力、狀態和情況,以確保車輛在ODD(操作設計域)內運行。
2、服務模塊(灰色塊部分)
人機界面(HMI)- 作為車內乘客的主要接口,以向系統提供輸入(例如踏板、方向盤、圖形用戶界面或其他),影響系統的行為,或向用戶提供當前任務或面前任務的狀態和/或約束的反饋。HMI也可以作為車輛與外界的接口,以確保行人或其他車輛知道車輛的意圖、健康狀態或操作狀態。
互聯服務 - 提供數據接口,確保自動駕駛系統接收最新的地圖、交通或其他數據以支持面前的任務。通信具有雙向性,例如提供自動駕駛系統信息、乘客健康狀態或其他相關數據。
車輛對X(V2X)- 車輛對基礎設施或車輛對車輛作為相關的系統輸入,以支持車輛的安全和高效操作。這可以提供基礎設施的信息(例如交通燈狀態或位置),或自主車輛可能看不到的車輛的信息。
3、跨功能屬性(黃色塊部分)
上述構建模塊代表了從L1到L5的端到端功能的主要模塊。黃色模塊涉及跨功能的屬性,雖然重要,但不是計算功能的關鍵,在本文后續不會完整涵蓋。
-
傳感器
+關注
關注
2564文章
52797瀏覽量
765512 -
模塊
+關注
關注
7文章
2785瀏覽量
50032 -
汽車電子
+關注
關注
3036文章
8294瀏覽量
169885 -
自動駕駛
+關注
關注
788文章
14266瀏覽量
170203
發布評論請先 登錄
FPGA在自動駕駛領域有哪些應用?
FPGA在自動駕駛領域有哪些優勢?
谷歌的自動駕駛汽車是醬紫實現的嗎?
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
細說關于自動駕駛那些事兒
自動駕駛的到來
AI/自動駕駛領域的巔峰會議—國際AI自動駕駛高峰論壇
如何讓自動駕駛更加安全?
自動駕駛系統設計及應用的相關資料分享
自動駕駛技術的實現
自動駕駛線控底盤VCU功能介紹
自動駕駛軌跡規劃功能模塊圖





 工商網監
工商網監
評論