 【藍橋杯嵌入式】第九章 PWM
【藍橋杯嵌入式】第九章 PWM

第一節 原理與常識
PWM簡稱脈沖寬度調制,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在測量、通信、工控等方面。
PWM的頻率是指在1秒鐘內,信號從高電平到低電平再回到高電平的次數,也就是說1秒鐘PWM有多少個周期,單位Hz。
PWM的周期T=1/f,T是周期,f是頻率。如果頻率為50Hz ,也就是說一個周期是20ms,那么1秒鐘就有50次PWM周期。
占空比是一個脈沖周期內,高電平(脈寬)時間與整個周期時間的比例,單位是% (0%-100%)。
一個周期的長度,如下圖所示。
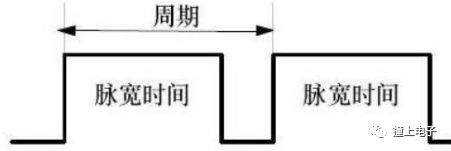
比方說,周期的時間是10ms,高電平(脈寬)時間是8ms,那么占空比是8/10= 80%,這就是占空比為80%的脈沖信號。
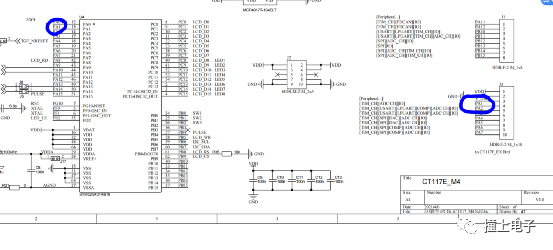
第二節硬件解讀
PWM是芯片STM32G431RBT6的內部資源,我們以PA1為例:
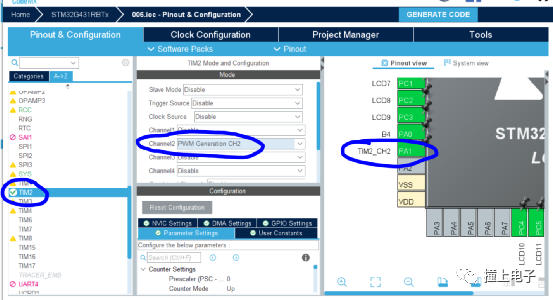
第三節CubeMX配置
第一步:將PA1配置為TIM2_CH2引腳,操作如下:
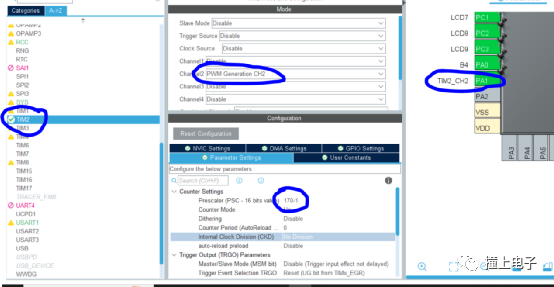
第二步:配置定時器參數,如下圖:【注意:本教程STM32G431RBT6主頻為170MHZ】
第四節MDK代碼
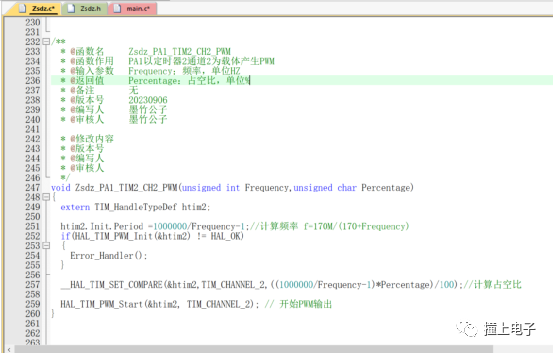
第一步:封裝PWM函數。如下圖:
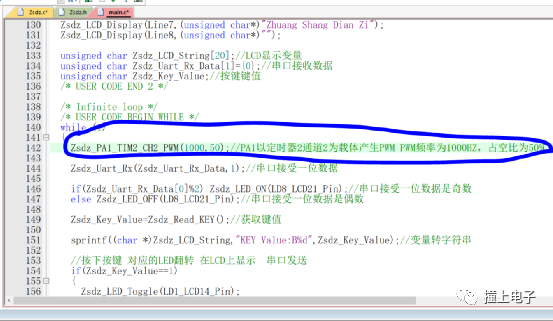
第二步:在mian函數中調用。
第五節 實驗現象
現象:
1,上電8個LED閃爍一次,然后熄滅;
2,按下按鍵,對應的LED翻轉一次;
3,LCD顯示“LCD Test”,“Zhuang Shang Dian zi”等字符串,并顯示按鍵鍵值;
4,串口以9600波特率發送鍵值;
5,當串口以9600波特率接收到最新的一位數據是偶數,LD8熄滅,反之常亮;
6,PA1以定時器2通道2為載體產生PWM,PWM頻率為1000HZ,占空比為50%。
來源:撞上電子微信公眾號
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
模擬電路
+關注
關注
125文章
1591瀏覽量
103813 -
嵌入式
+關注
關注
5146文章
19597瀏覽量
316299 -
PWM
+關注
關注
116文章
5456瀏覽量
218779 -
硬件
+關注
關注
11文章
3473瀏覽量
67346
發布評論請先 登錄
相關推薦
熱點推薦

【「從算法到電路—數字芯片算法的電路實現」閱讀體驗】+第九章sigma delta adc閱讀與分享
本章介紹了sigma delta adc的硬件實現,ADC是嵌入式開發中絕對很基礎重要的一個模塊,而sigma delta adc有其特點,即位數可以做到很高,但是采樣率相對會低一些,了解完書中硬件
發表于 11-20 13:58
九章云極DataCanvas公司與云南聯通簽署合作協議
近日,九章云極DataCanvas公司與中國聯合網絡通信有限公司云南省分公司(以下簡稱云南聯通)在昆明正式簽署《中國聯通兩亞“國際”智算中心聯合運營協議》,標志著雙方將共同推進建設云南省首個千P級

【北京迅為】i.mx8mm嵌入式linux開發指南第四篇 嵌入式Linux系統移植篇第六十九章uboot移植
【北京迅為】i.mx8mm嵌入式linux開發指南第四篇 嵌入式Linux系統移植篇第六十九章uboot移植
揚帆出海!九章云極DataCanvas公司驚艷亮相迪拜GITEX Global 2024
近日,第44屆GITEXGLOBAL展會(GITEXGLOBAL2024)及全球領先的創業與投資盛會ExpandNorthStar2024在迪拜盛大啟幕。九章云極DataCanvas公司驚艷亮相盛會

【「嵌入式Hypervisor:架構、原理與應用」閱讀體驗】+第三四章閱讀報告
在深入閱讀了《嵌入式Hypervisor:架構、原理與應用》的第三、四章后,我對嵌入式Hypervisor的設計與實現技術有了更為詳盡和系統的理解。以下是我對這兩章內容的閱讀報告:
發表于 10-09 18:29
【「嵌入式Hypervisor:架構、原理與應用」閱讀體驗】+第一二章讀后感
非常感謝社區提供的閱讀機會,拿到書后,就迫不及待的的開始閱讀了。
社區還有簽名留念呢,值得紀念。
《嵌入式Hypervisor:架構、原理與應用》的第一、二章為讀者提供了關于Hypervisor技術
發表于 10-09 18:22
九章云極DataCanvas公司「算力包」產品璀璨亮相2024中國算力大會!
九章云極DataCanvas公司技術專家向與會者詳細介紹算力包的產品能力和創新模式,收獲行業伙伴的高度認可。算力作為AI時代的數字能源,將在行業應用和技術創新互相驅動下,邁入“算力普惠”的終極生態,AI應用也將迎來爆發式的繁榮。

《DNK210使用指南 -CanMV版 V1.0》第九章 打印輸出實驗
第九章 打印輸出實驗 本章節為實驗篇的第一章,將通過打印輸出實驗為后續實驗中的交互打下基礎。通過本章的學習,讀者將學習到CanMV中print()函數的使用。本章分為如下幾個小節:9.1 打印輸出
發表于 09-28 14:51
九章云極DataCanvas算力包正式發布
在數字化轉型的浪潮中,九章云極DataCanvas再次引領創新,正式推出全新算力產品——“算力包”。這一創新力作,以用戶為核心,顛覆傳統算力服務模式,采用“按需購買、即買即用”的靈活方式,讓算力資源觸手可及。
智算筑基,九章云極DataCanvas公司閃耀2024年服貿會
9月12日,2024年中國國際服務貿易交易會在北京隆重開幕,九章云極DataCanvas公司攜AI智算產品系列深度參展本屆服貿會,為觀眾奉上技術與應用深度融合的參展盛宴。

【「ARM MCU嵌入式開發 | 基于國產GD32F10x芯片」閱讀體驗】+書籍整體概況
SPI接口,通過使用軟件模擬方式讀寫W25Qxx案例、硬件SPI操作W25Q32。第九章介紹CAN總線,CAT實驗介紹。第十章介紹模擬轉換器即ADC外設應用。第十一章介紹DMA直接數據存取內容。
第十二章
發表于 08-25 22:48
學習hypervisor嵌入式產品安全設計
第一部分(第1~2章)介紹Hypervisor基礎,涵蓋虛擬化技術與實現、主流的嵌入式Hypervisor產品,以及基于分離內核的嵌入式Hypervisor等內容。第二部分(第3~12章
發表于 08-25 09:11
第九章-PID整定方法 STM32PID驅動編碼器 STM32PID控制電機轉速
控制、PID循跡、PID跟隨、遙控、避障、PID角度控制、視覺控制、電磁循跡、RTOS等功能。
?# 第九章-PID整定方法
## 9.1-調整合適的采樣周期和PID調參方法
正如

九章云極DataCanvas公司入選北京市通用人工智能產業創新伙伴計劃
作為北京市標桿人工智能企業,九章云極DataCanvas公司將持續發揮產業優勢,繼續堅持將自主創新的AI技術注入產業,以大模型應用為終極服務目標,通過包括大模型在內的人工智能基礎軟件,為政府和行業用戶提供國際領先的AI服務,加速數字經濟跨越發展!






 工商網監
工商網監
評論