 機械臂連桿Link的描述
機械臂連桿Link的描述

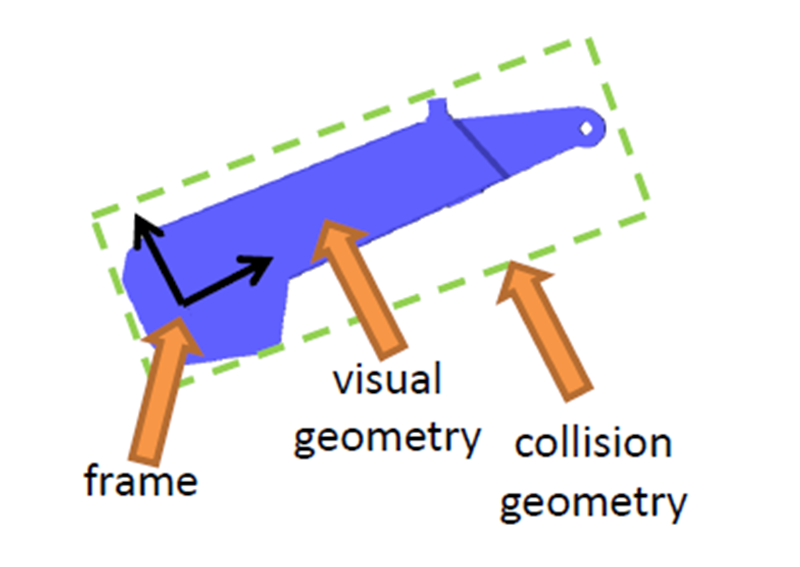
標簽用來描述機器人某個剛體部分的外觀和物理屬性,外觀包括尺寸、顏色、形狀,物理屬性包括質量、慣性矩陣、碰撞參數等。
以這個機械臂連桿為例,它的link描述如下:

link標簽中的name表示該連桿的名稱,我們可以自定義,未來joint連接link的時候,會使用到這個名稱。
link里邊的部分用來描述機器人的外觀,比如:
表示幾何形狀,里邊使用調用了一個在三維軟件中提前設計好的藍色外觀,就是這個stl文件,看上去和真實機器人是一致的
表示坐標系相對初始位置的偏移,分別是x、y、z方向上的平移,和roll、pitch、raw旋轉,不需要偏移的話,就全為0。
第二個部分,描述碰撞參數,里邊的內容似乎和一樣,也有和,看似相同,其實區別還是比較大的。
部分重在描述機器人看上去的狀態,也就是視覺效果;
部分則是描述機器人運動過程中的狀態,比如機器人與外界如何接觸算作碰撞。在這個機器人模型中,藍色部分是通過來描述的。
在實際控制過程中,這樣復雜的外觀在計算碰撞檢測時,要求的算力較高,為了簡化計算,我們將碰撞檢測用的模型簡化為了綠色框的圓柱體,也就是里邊描述的形狀。
坐標系偏移也是類似,可以描述剛體質心的偏移。
如果是移動機器人的話,link也可以用來描述小車的車體、輪子等部分。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29603瀏覽量
212133 -
移動機器人
+關注
關注
2文章
788瀏覽量
34070 -
機械臂
+關注
關注
13文章
551瀏覽量
25299 -
機器臂
+關注
關注
0文章
18瀏覽量
6406
發布評論請先 登錄
相關推薦
熱點推薦
【FireBLE申請】基于leapmotion的智能機械臂
申請理由:申請了個基于leapmotion智能機械臂的創新項目,現在申請到了國家的補助,希望用藍牙來完成傳輸部分,減少開發成本,完善開發穩定項目描述:體感的傳感器基于leapmotion的攝像頭和紅外傳感器,用藍牙來傳輸數據到
發表于 08-08 12:12
【NV32F100x申請】基于stm32的機械臂控制
申請理由:項目描述:檢驗系統流暢性,包括外觀布局,以及硬件電路分布的合理性。做過基于PLC的機械臂控制,現在想控制成本,做基于STM32的機械臂
發表于 10-28 16:08
關于機械臂的設計問題
本帖最后由 tangwentao 于 2019-12-16 15:14 編輯背景: 公司本來搞軟件的,現在跟別人合作,要搞個機械臂的東西。要求: 1.這個機械臂要搭載一個攝像頭,然后由
發表于 12-16 15:32
求一種機械臂建模D-H方法
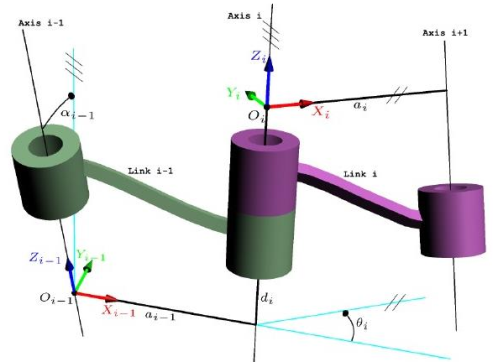
D-H法機械臂建模D-H建模方法是由D和H兩個人提出的,是用于機器人運動學上的建模方法,該方法是在每個連桿上建立一個坐標系,通過齊次變換來實現兩個連桿上的坐標變換。通過依次的變換最終可
發表于 01-20 08:12
機械臂的控制學習
機械臂的控制-------------控制器1.位置控制機器人最傳統,最常用的控制方式就是位置控制,它能以0誤差來達到指定位置或以0誤差跟隨指定軌跡。普通的位置控制,是控制機器人末端到指定的地點(讓
發表于 02-23 07:49

如何選擇一款六軸機械臂作為入門(教育或者研究)機械臂?
未來的趨勢絕對是機器人代替人工作業,機械臂首當其沖。如今機械臂工業化已經比較成熟,許多人都開始對機械臂

機械臂結構是什么樣的
該機械臂 6 個關節都是轉動關節,前 3 個關節確定手腕參考點的位置,后 3個關節確定手腕的方位。和大多數工業機器人一樣,后 3個關節軸線交于一點。因此將該點作為手腕的參考點,也選作為連桿坐標系{4





 工商網監
工商網監
評論