") 百億市場!高性能MEMS IMU,將成自動駕駛的下一個風口【附報告下載】
百億市場!高性能MEMS IMU,將成自動駕駛的下一個風口【附報告下載】
來源:華安機械 分析師張帆,謝謝
編輯:感知芯視界 萬仞
獲取最新IMU行業(yè)研究報告,可在感知芯視界首頁對話框,回復“IMU”免費下載。
【摘要】
○預計高性能MEMS IMU市場規(guī)模最高達100億元。目前國產(chǎn)高性能三軸芯片自主可控已突破,放量在即百億市場有望迎來爆發(fā)
○IMU(慣性測量單元)通過測量物體加速度和角速度的變化來推算出物體在三維空間中的位置和姿態(tài)。目前高精度MEMS IMU民用市場,主要應(yīng)用場景包括高精度自動駕駛以及人形機器人。
○自動駕駛達到L3級以及以上,所需要IMU精度需要達到1°/h以內(nèi),目前較高精度的MEMS IMU芯片全部依賴于海外進口;同時人形機器人達到特斯拉Optimus的精度,需要通過增加高精度MEMS IMU數(shù)量來達到身體穩(wěn)定、姿態(tài)控制以及頭不穩(wěn)定補償?shù)男Ч虼烁咝阅躆EMS IMU芯片國產(chǎn)自主可控的機遇需要提前布局。
什么是IMU
慣性測量單元(Inertial measurement unit,簡稱IMU),是測量物體三軸姿態(tài)角及加速度的裝置。一般IMU包括三軸陀螺儀及三軸加速度計,部分IMU還包括三軸磁力計。IMU在小至手機、VR,大至航空、航天領(lǐng)域都得到了廣泛的應(yīng)用。
?IMU通常包含陀螺儀(Gyroscope)、加速度計(Accelermeters),有的還包含磁力計(Magnetometers)和氣壓計。
? 加速計是一個測量特定力的傳感器(身體質(zhì)量使力正常化)。它提供在其本地框架內(nèi)跨越x、y、z軸的加速度。
? 陀螺儀是一個傳感器,它測量在其本地框架內(nèi)圍繞x、y和z軸的角速度。一般來說,對測量結(jié)果進行整合,得出角度本身。
? 磁強計是一個測量地球磁場并提供航向的傳感器(羅盤就是這樣一個設(shè)備)。如果它包括在IMU中,我們通常將其描述為 "9軸IMU"。
? 氣壓計是一個測量氣壓的傳感器,可以提供海拔高度。
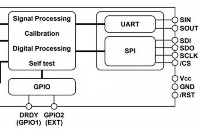
IMU的基本原理
? 下圖為MEMS陀螺儀角速度計(MEMS gyroscope),其工作原理是利用角動量守恒原理及科里奧效應(yīng)測量運動物體的角速率。它主要是一個不停轉(zhuǎn)動的物體,它的轉(zhuǎn)軸指向不隨承載它的支架的旋轉(zhuǎn)而變化。
? 與加速度計工作原理相似,陀螺儀的上層活動金屬與下層金屬形成電容。當陀螺儀轉(zhuǎn)動時,他與下面電容板之間的距離機會發(fā)生變化,上下電容也就會因此而改變。電容的變化跟角速度成正比,由此我們可以測量當前的角速度。
獲取最新IMU行業(yè)研究報告,可在感知芯視界首頁對話框,回復“IMU”免費下載。
自動駕駛中的傳感器
隨著科技的不斷發(fā)展,自動駕駛技術(shù)日趨成熟。為了實現(xiàn)自動駕駛汽車的各種復雜功能,精確而又可靠的位置信息開始變得不可或缺,高精度MEMS IMU作用日益凸顯:
? 擁擠的城市峽谷環(huán)境給自動駕駛汽車傳感器陣列帶來了巨大的挑戰(zhàn)。當自動駕駛汽車在失去GPS/GNSS信號的情況下試圖左轉(zhuǎn)時,IMU技術(shù)開始凸顯它的重要作用。
? 感知傳感器作為自動駕駛主動決策的主要信息來源,可以感知車輛周圍的世界。
? 導航系統(tǒng)由GNSS / GPS接收機和INS(慣性導航系統(tǒng))組成,慣導系統(tǒng)包括慣性運動傳感器和來自里程計和轉(zhuǎn)向傳感器的輸入。
? 長期以來,基于MEMS的慣性傳感器(如陀螺儀和加速度計)已作為分立元件應(yīng)用于車輛的碰撞檢測、安全氣囊彈出和電子穩(wěn)定性控制。
從結(jié)構(gòu)上看,IMU主導的慣性導航分為平臺式和捷聯(lián)式。按照市場發(fā)展趨勢,慣性測量
傳感器正在不斷向輕量化方向發(fā)展,捷聯(lián)式逐漸成為主流。
自動駕駛中IMU的優(yōu)勢
? 與其他導航系統(tǒng)相比,IMU主導的慣導系統(tǒng)具有信息全面,完全自主、高度隱蔽、信息實時與連續(xù),且不受時間、地域的限制和人為因素干擾等重要特性,在城市峽谷或森林道路中,IMU不會受到多路徑效應(yīng)或信號衰減的影響。
? 在自動駕駛系統(tǒng)中,IMU數(shù)據(jù)與GNSS、視覺和其他探測和測距系統(tǒng)融合,以填補GNSS更新之間的空隙,并在GNSS和/或其他傳感器受到影響時安全進行短時導航。IMU數(shù)據(jù)始終可用,是任何自主車輛系統(tǒng)的一個組成部分,并可用于在具挑戰(zhàn)性的環(huán)境中維持車輛安全運行。
自動駕駛中的IMU應(yīng)用
? 自動駕駛汽車駛?cè)敫邩橇至⒌膮^(qū)域,失去了衛(wèi)星信號,無法由GPS提供絕對定位,此時,IMU可以發(fā)揮其延續(xù)絕對定位的作用,在沒有GPS信號的區(qū)域為汽車提供絕對定位信息,這些信息包括汽車的實時經(jīng)緯度和海拔高度。
? 自動駕駛汽車通過車道線識別功能確保自身在道路中行駛,在遇到強烈太陽光照射的情況下,車道線識別功能失效。此時,IMU可以發(fā)揮其延續(xù)相對定位的作用,根據(jù)歷史記錄中的道路曲率與汽車相對于車道邊界的歷史位置,確保汽車在一段時間內(nèi)繼續(xù)行駛在車道中。
視線遮擋時IMU工作示意圖
IMU是自動駕駛系統(tǒng)在定位領(lǐng)域的最后一道防線:
? 第一,IMU對相對和絕對位置的推演沒有任何外部依賴,是一個類似于黑匣子的完備系統(tǒng);相比而言,基于GPS的絕對定位依賴于衛(wèi)星信號的覆蓋效果,基于高精地圖的絕對定位依賴于感知的質(zhì)量和算法的性能,而感知的質(zhì)量與天氣有關(guān),都有一定的不確定性。
? 第二,同樣是由于IMU不需要任何外部信號,它可以被安裝在汽車底盤等不外露的區(qū)域,可以對抗外來的電子或機械攻擊;相比而言,視覺、激光和毫米波在提供相對或絕對定位時必須接收來自汽車外部的電磁波或光波信號,這樣就很容易被來自攻擊者的電磁波或強光信號干擾而致盲,也容易被石子、刮蹭等意外情況損壞。
? 第三,IMU對角速度和加速度的測量值之間本就具有一定的冗余性,再加上輪速計和方向盤轉(zhuǎn)角等冗余信息,使其輸出結(jié)果的置信度遠高于其它傳感器提供的絕對或相對定位結(jié)果。
高精度IMU在自動駕駛汽車的廣泛實際應(yīng)用
自動駕駛中的GNSS+RTK+IMU組合導航
? 當乘用車達到L3及以上自動駕駛水平,車輛必將擁有能夠精準定位的裝置。目前乘用車的定位精度普遍未能達到自動駕駛的要求。乘用車高精度定位應(yīng)用屬于從0到1的環(huán)節(jié),隨著自動駕駛級別的演進,其重要性將日益增強。
? 目前行業(yè)內(nèi)對自動駕駛車端的工作模塊主要分為三類:感知層,決策層和控制層。感知層依賴于衛(wèi)星定位、慣性定位、環(huán)境感知等定位技術(shù),來感知外界、自己車輛狀態(tài),是自動駕駛的前置條件。
自動駕駛車端硬件架構(gòu)
? 衛(wèi)星定位、慣性定位、環(huán)境感知定位三種定位方式由于實現(xiàn)的方式不同,在不同能力范圍內(nèi)各有優(yōu)劣,單獨的定位方式方案難以滿足自動駕駛對高精定位的需求。
三種定位方式優(yōu)劣對比表
? 目前行業(yè)內(nèi)共識的組合方案是由GNSS單元、RTK定位確定 圖表17 完全組合的定位框架絕對位置,IMU確定相對位置,同時,高精地圖與激光雷達,攝像頭等感知設(shè)備用于環(huán)境感知。
? 車輛從GNSS+RTK+IMU定位組合中獲得車輛位置的預測值,從高精地圖中獲取位置附近的環(huán)境特征,之后將掃描識別的環(huán)境特征與高精地圖記述的環(huán)境特征做匹配融合,獲取車輛當下精準的位置信息。各工作單元之間信息相互耦合,結(jié)果相互冗余,從而保障了定位的精度和可靠性。
? 通過激光雷達、視覺等傳感器實現(xiàn)的環(huán)境特征定位與高精地圖結(jié)合的定位方案也能實現(xiàn)高精定位,但是視覺、激光雷達等傳感器的器件成本,以及對邊緣計算的要求高,衛(wèi)慣組合導航幾乎可以通過十分之一的價格實現(xiàn)相同的效果。所以目前衛(wèi)慣組合導航還是最主流的高精定位方案。
完全組合的定位框架
自動駕駛領(lǐng)域MEMS IMU市場空間廣闊
? 目前來看,我國量產(chǎn)乘用車自動駕駛等級正在由L2向L3過度。未來市場發(fā)展空間廣闊。在全新的自動化駕駛架構(gòu)下,汽車智能化的滲透率不斷提升,傳統(tǒng)汽車行業(yè)正面臨著變革與轉(zhuǎn)型,行業(yè)迎來新的發(fā)展機遇。
? 根據(jù)中汽協(xié)預測,2025年中國汽車銷量或?qū)⑦_到3000萬輛。
? 預測,2025年我國L3級以上(包含L3)自動駕駛的滲透率保守估計為10%,樂觀估計為20%。
IMU產(chǎn)業(yè)鏈
IMU中的MEMS陀螺儀按照零偏穩(wěn)定性的指標劃為消費級(>15°/h)、戰(zhàn)術(shù)級(0.15-15°/h)、導航級(0.01-0.15°/h)、戰(zhàn)略級(<0.01°/h)。目前國內(nèi)在消費級完全自主可控,戰(zhàn)術(shù)級達到1°/h以內(nèi)的精度之后完全依賴于海外進口,國產(chǎn)替代自主可控成為關(guān)鍵;目前主要的應(yīng)用場景為自動駕駛L3級以及以上的水平、人形機器人所需要的IMU芯片精度需要達到1°/h以內(nèi)。
?IMU上游芯片:
海外廠商主要包括霍尼韋爾、TDK、ST、Silicon Sensing等;國內(nèi),芯動聯(lián)科目前唯一能夠生產(chǎn)高精度MEMS傳感器的國內(nèi)廠商,此外正在布局自動駕駛L3級以及以上所需的IMU芯片的廠商還包括上海矽睿科技、深圳深迪半導體。
?IMU模組:
直接生產(chǎn)IMU模組的廠商,海外主要包括TDK、ST、霍尼韋爾等;國內(nèi)包括芯動聯(lián)科、蘇州固锝。
?IMU下游慣導:
海外廠商主要包括U-Blox、霍尼韋爾、ADI、 諾斯羅普格魯曼(Northrop Grumman);國內(nèi)包括中海達、華測導航、華依科技、星網(wǎng)宇達、理工導航。
獲取最新IMU行業(yè)研究報告,可在感知芯視界首頁對話框,回復“IMU”免費下載。
*免責聲明:本文版權(quán)歸原作者所有,本文所用圖片、文字如涉及作品版權(quán),請第一時間聯(lián)系我們刪除。本平臺旨在提供行業(yè)資訊,僅代表作者觀點,不代表感知芯視界立場。
今日內(nèi)容就到這里啦,如果有任何問題,或者想要獲取更多行業(yè)干貨研報,可以私信我或者留言
審核編輯 黃宇
-
mems
+關(guān)注
關(guān)注
129文章
4093瀏覽量
192898 -
IMU
+關(guān)注
關(guān)注
6文章
341瀏覽量
46569 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14248瀏覽量
169982
發(fā)布評論請先 登錄
小馬智行助力公路干線物流自動駕駛發(fā)展
禾賽科技領(lǐng)跑全球自動駕駛激光雷達市場
自動駕駛經(jīng)歷了哪些技術(shù)拐點?

自動駕駛大模型中常提的Token是個啥?對自動駕駛有何影響?
理想汽車推出全新自動駕駛架構(gòu)
愛普生M-G366PDG適用于商用車自動駕駛領(lǐng)域
自動駕駛中常提的魯棒性是個啥?

一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

新品發(fā)布 | TOSUN正式推出GPS轉(zhuǎn)CAN FD模塊產(chǎn)品,為自動駕駛提供數(shù)據(jù)支持

自動駕駛中常提的SLAM到底是個啥?

MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
自動駕駛演變下,汽車連接器市場如何擴容?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論