 西門子MCD+PLC+Matlab實現倒立擺控制
西門子MCD+PLC+Matlab實現倒立擺控制
一、概述
倒立擺系統的整定是自動控制理論中的典型問題,在網路上或者書籍中可以找到不少相關的資料知識,整定算法也多式多樣,模糊PID、LQR、以及本文用到的PID等。
在傳統的倒立擺實驗中,常用的仿真工具組合Matlab+Adams、或者構建一個傳遞函數在Simulink仿真等,或者直接用單片機搭建一套實物系統,在網路上也有見到用匯川或者倍福PLC搭建實物倒立擺系統。
二、實現思路
在本文中使用到的環境正如標題所示Matlab+MCD+PLC,其中Matlab用到是Simulink,PLC用到的是西門子的PLCSIM Advanced,MCD為NX MCD,為純軟件在環仿真,實驗分兩步走:
1、Simulink(控制算法)+MCD(物理環境),這一步主要是利用MATLAB豐富的算法模型,方便的搭建控制算法(雖然倒立擺控制算法已經很成熟了,大家以點帶面,領悟精神即可)。
2、PLC SIM(從Simulink中移植算法)+MCD(物理環境),完整實現倒立擺從起擺到整定過程。
三、程序設計及實現
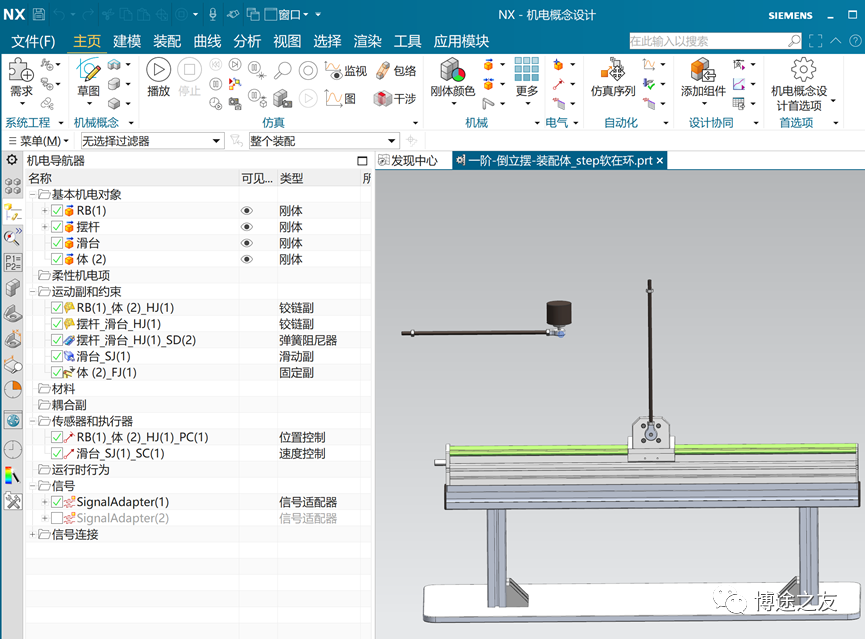
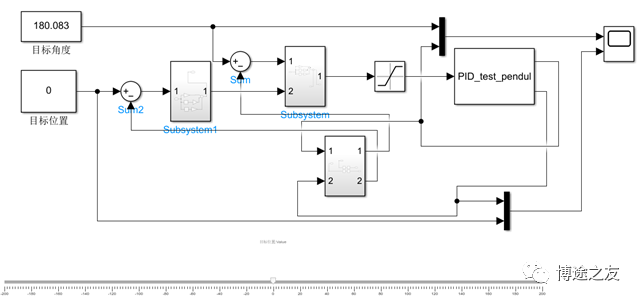
第一步:在MCD中構建倒立擺模型的物理仿真環境,在Simulink中搭建并級PID控制器。
在Simulink中搭建控制模型,為了方便實驗參數調整,這里提前將Simulink調整為定步長。
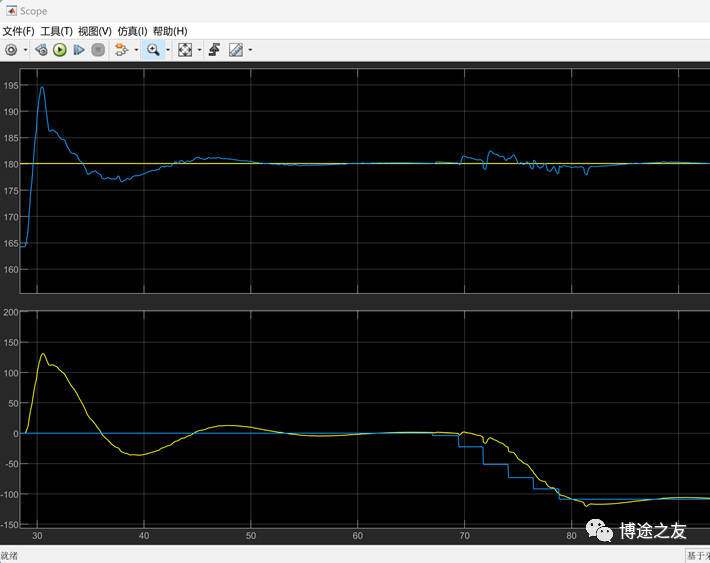
實現效果:從波形和實際效果可以看到效果符合預期,且對于手動拖拽擺棍,這種施加外力因素下,也有較好的整定效果。
演示視頻
小結:至此我們已經實現了雙環的控制,并且得到了較好的效果。其實省去了動力學模型分析以及傳遞函數構建,而是直接放在了MCD的物理環境中。(當然PID等參數我也沒有計算,有興趣的朋友可以推導下)。
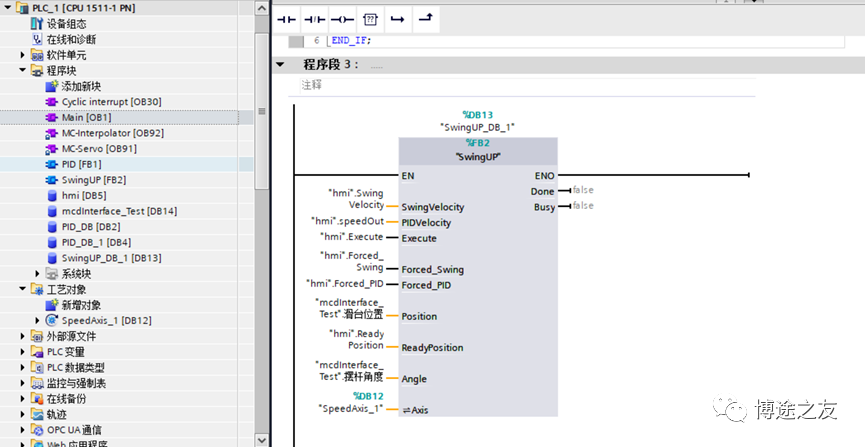
第二步:將Matlab中的控制算法離散化移植到PLC中,為了貼合實際環境,采用了工藝對象軸控制滑臺的運動,MCD繼續引用之前的測試環境。
實現效果:這一步完整實現了倒立擺從起擺到整定的過程。
審核編輯:劉清
-
matlab
+關注
關注
188文章
2998瀏覽量
233464 -
plc
+關注
關注
5031文章
13799瀏覽量
472695 -
mcd
+關注
關注
0文章
12瀏覽量
11276 -
PID控制器
+關注
關注
2文章
173瀏覽量
19110 -
simulink仿真
+關注
關注
0文章
75瀏覽量
8742
原文標題:西門子MCD+PLC+Matlab實現倒立擺控制:算法+仿真+控制的完美結合
文章出處:【微信號:智能制造之家,微信公眾號:智能制造之家】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于matlab的二級倒立擺控制系統

西門子plc數據類型_西門子plc通訊方式






 工商網監
工商網監
評論