 EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(五):通過RTSys進行調試與診斷
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(五):通過RTSys進行調試與診斷

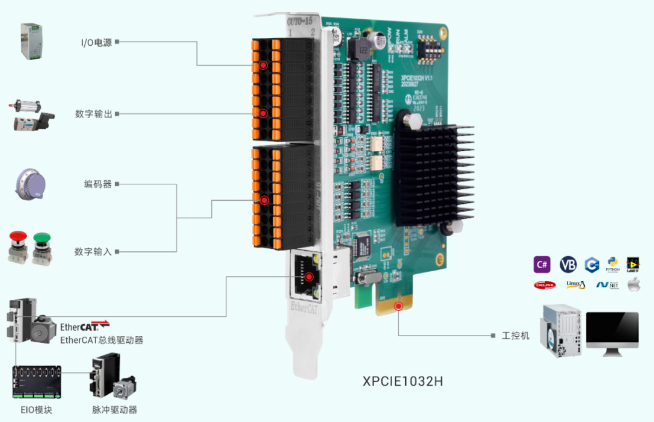
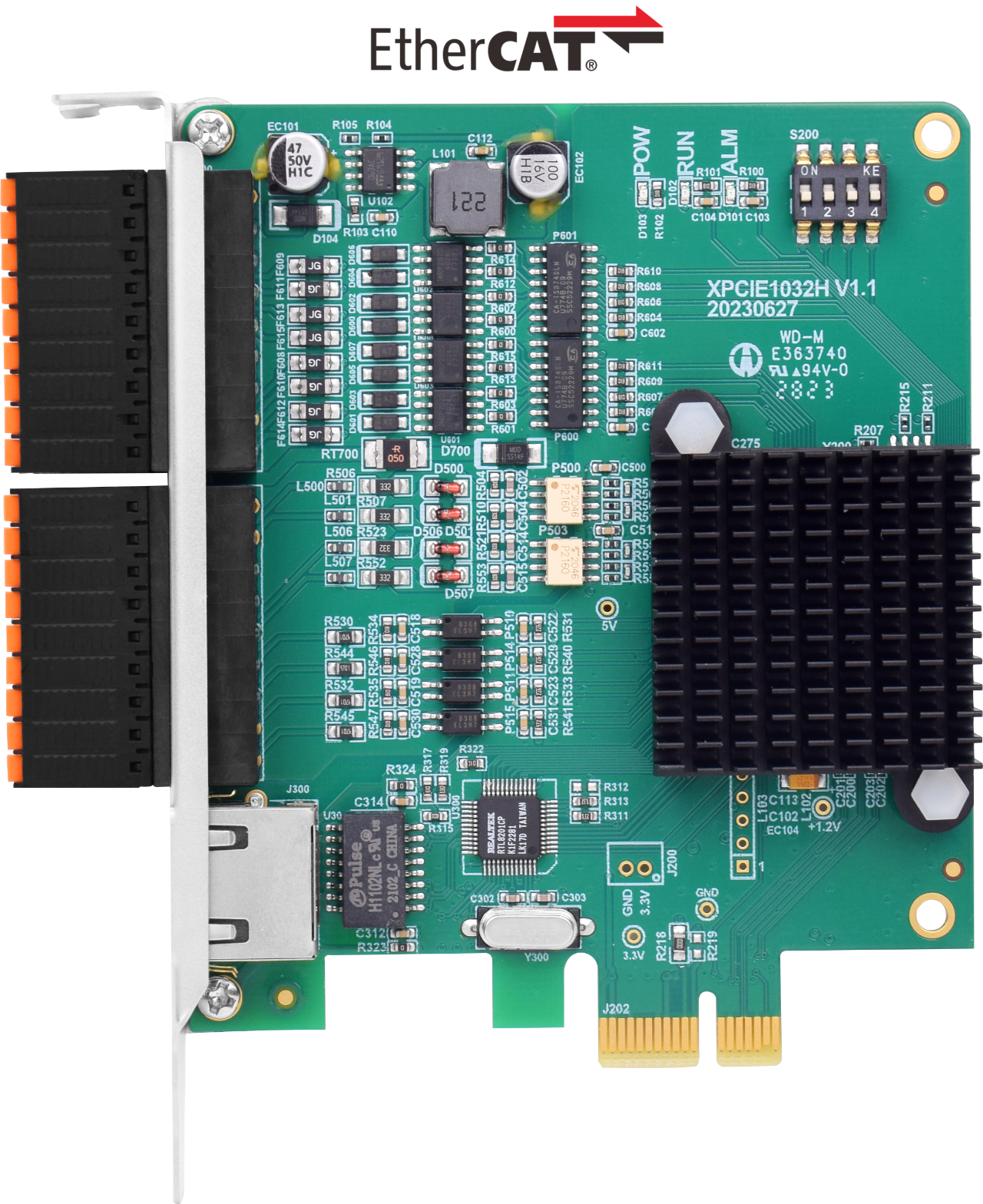
XPCIE1032H功能簡介
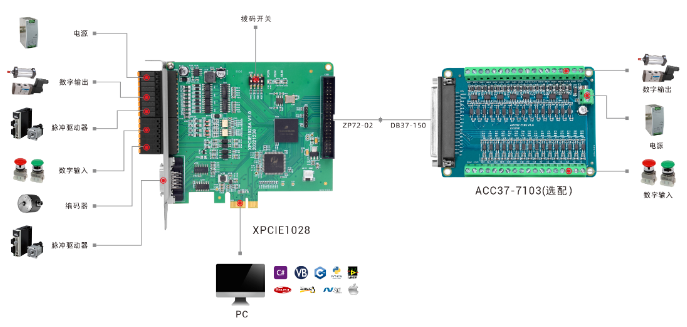
XPCIE1032H是一款基于PCI Express的EtherCAT總線運動控制卡,可選6-64軸運動控制,支持多路高速數字輸入輸出,可輕松實現多軸同步控制和高速數據傳輸。XPCIE1032H集成了強大的運動控制功能,結合MotionRT7運動控制實時軟核,解決了高速高精應用中,PC Windows開發的非實時痛點,指令交互速度比傳統的PCI/PCIe快10倍。

XPCIE1032H支持PWM,PSO功能,板載16進16出通用IO口,其中輸出口全部為高速輸出口,可配置為4路PWM輸出口或者16路高速PSO硬件比較輸出口。輸入口含有8路高速輸入口,可配置為4路高速色標鎖存或兩路編碼器輸入。
XPCIE1032H搭配MotionRT7實時內核,使用本地LOCAL接口連接,通過高速的核內交互,可以做到更快速的指令交互,單條指令與多條指令一次性交互時間可以達到3-5us左右。
RTSys開發軟件簡介
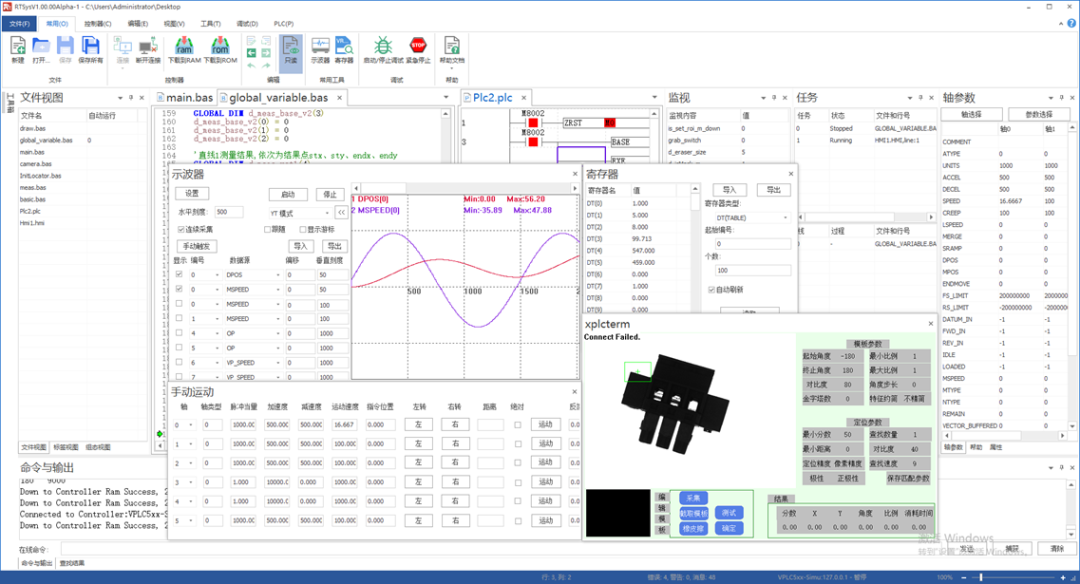
RTSys是正運動推出的集成運動控制+機器視覺功能的開發軟件,支持RTBasic、RTPlc梯形圖、RTHmi、RTVision機器視覺等二次開發,并可混合編程、實時仿真、在線跟蹤以及診斷與調試,快速實現智能裝備的視覺定位、測量、識別、檢測和復雜的運動控制等系統的開發。
RTSys軟件開發界面如下圖所示。用戶可通過串口或網口連接PC與控制器,使用RTSys軟件編寫的程序可以直接下載到正運動控制器里脫機運行,也可以在PC平臺仿真運行。
 RTSys開發界面
RTSys開發界面
RTSys軟件支持四種編程方式:RtBasic、RtPLC梯形圖、HMI組態以及C語言編程。
RTSys軟件支持在線仿真調試,自帶仿真器ZMC Simulator和組態程序仿真工具xplc screen。
?XPCIE1032H與MotionRT7實時內核的配合具有以下優勢:
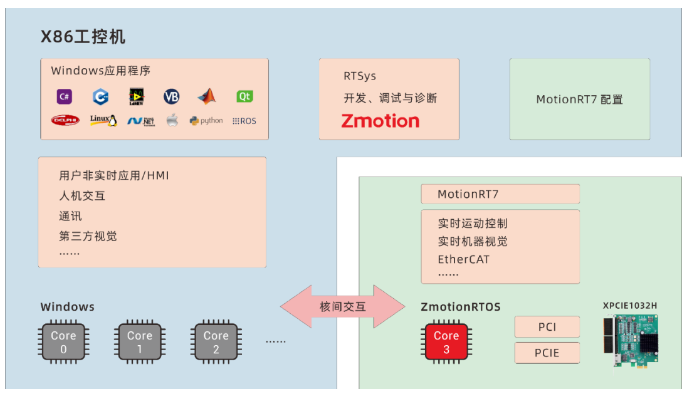
1.支持多種上位機語言開發,所有系列產品均可調用同一套API函數庫;
2.借助核內交互,可以快速調用運動指令,響應時間快至微秒級,比傳統PCI/PCIe快10倍;
3.解決傳統PCI/PCIe運動控制卡在Windows環境下控制系統的非實時性問題;
4.支持一維/二維/三維PSO(高速硬件位置比較輸出),適用于視覺飛拍、精密點膠和激光能量控制等應用;
5.提供高速輸入接口,便于實現位置鎖存;
6.支持EtherCAT總線和脈沖輸出混合聯動、混合插補。

?使用XPCIE1032H和MotionRT7進行項目開發時,通常需要進行以下步驟:
1.安裝驅動程序,識別XPCIE1032H;
2.打開并執行文件“MotionRT710.exe”,配置參數和運行運動控制實時內核;
3.使用ZDevelop軟件連接到控制器,進行參數監控。連接時請使用PCI/LOCAL方式,并確保ZDevelop軟件版本在3.10以上;
4.完成控制程序開發,通過LOCAL鏈接方式連接到運動控制卡,實現實時運動控制。

?與傳統PCI/PCIe卡和PLC的測試數據結果對比:
| 平均值 | C++ LOCAL | C# LOCAL | 傳統PCI/PCIe卡接口交互 | PLC網口通訊交互 |
| 1w次單條讀取交互周期 | 4.70us | 5.3us | 64us | 500us-10ms |
| 10w次單條讀取交互周期 | 3.90us | 5.7us | 65us | 500us-10ms |
| 1w次多條讀取交互周期 | 6.20us | 8.85us | 472us | 500us-10ms |
| 10w次多條讀取交互周期 | 5.50us | 8.37us | 471us | 500us-10ms |
我們可以從測試對比結果看出,XPCIE1032H運動控制卡配合實時運動控制內核MotionRT7,在LOCAL鏈接(核內交互)的方式下,指令交互的效率是非常穩定,當測試數量從1w增加到10w時,單條指令交互時間與多條指令交互時間波動不大,非常適用于高速高精的應用。
XPCIE1032H控制卡安裝
關閉計算機電源。
打開計算機機箱,選擇一條空閑的XPCIE卡槽,用螺絲刀卸下相應的擋板條。
將運動控制卡插入該槽,擰緊擋板條上的固定螺絲。
XPCIE1032H驅動安裝與建立連接參考往期文章EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(一):驅動安裝與建立連接。
一、C#語言進行運動控制開發
具體C#新建項目以及程序開發流程具體可參考“運動控制卡應用開發教程之C#”。本文主要以官方提供的C#例程為大家進行講解。
1、進入光盤資料選擇“PC函數庫2.1.1”。
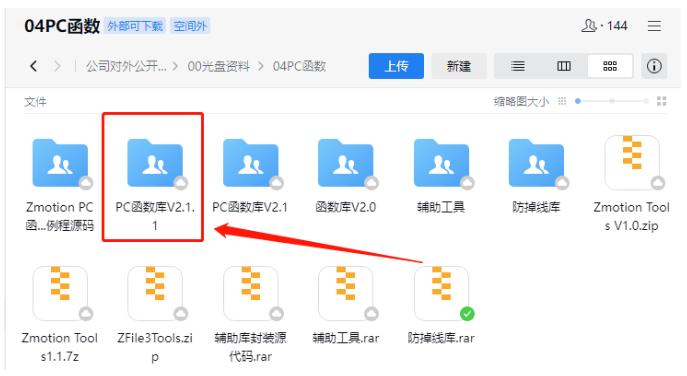
2、點擊“Windows平臺”。

3、點擊“庫文件與例程”。
4、根據需要選擇對應的函數庫和例程(64位為例),這里選擇64位。
5、解壓后選擇“C#”例程。
6、打開單軸運動項目文件夾(以單軸運動工程為例)。
7、打開項目后,編譯程序,可看到該例程控制臺程序界面如圖。
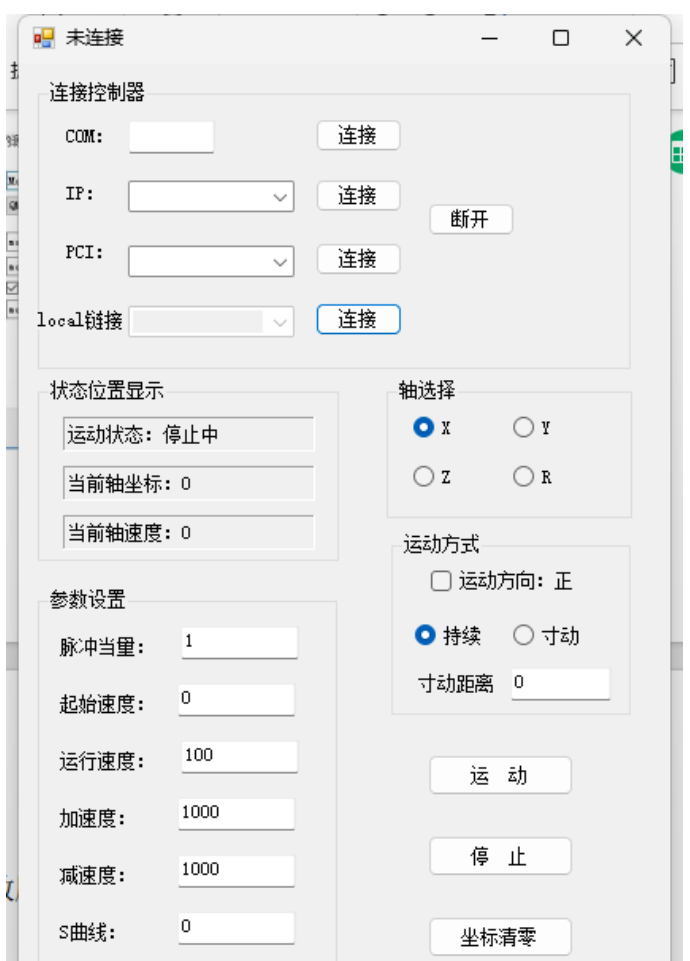
在該界面有一個LOCAL連接BUTTON按鈕,關聯的方法為ZAUX_FastOpen方法,MotionRT7選擇用此方式進行連接。
連接上板卡之后,在該界面可先進行對應的軸參數設置,設置完之后軸選擇,最后選擇運動方式,點擊運動即可。
二、相關PC函數介紹
相關PC函數介紹詳情可參考“ZMotion PC函數庫編程手冊 V2.1.1”。
三、RTSys調試與診斷
1、控制器連接
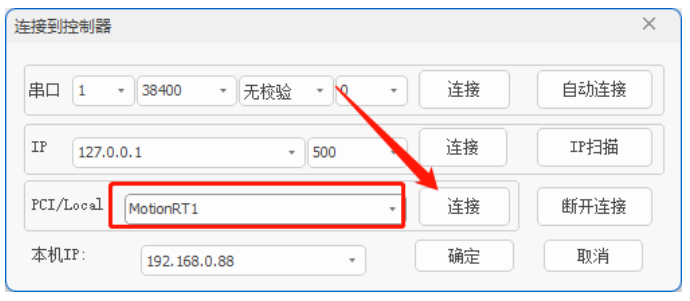
上位機開發的同時,要在RTSys上進行運動監控,首先要連接控制器。打開RTSys軟件,點擊菜單欄的控制器選項,選擇連接。
在彈出連接界面,選擇Local,點擊連接。
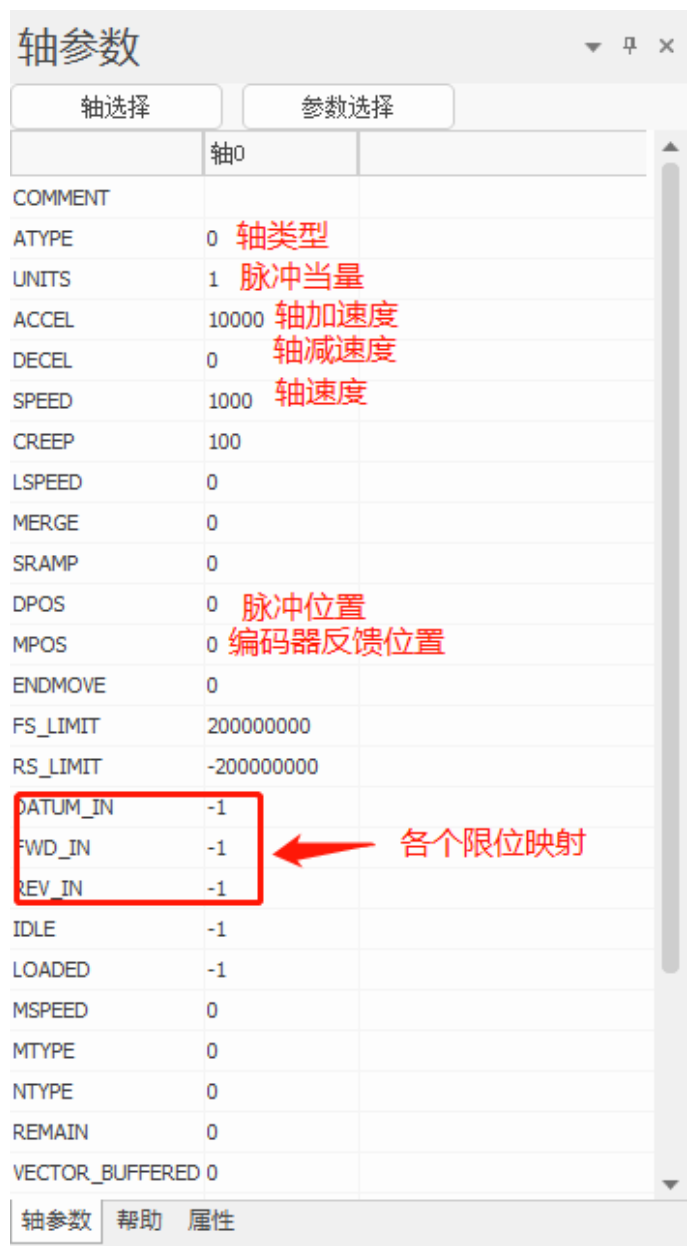
2、軸參數界面
連接成功之后,在界面右側,會出現一個軸參數界面,這個界面可以實時監控軸的各個參數變化值。
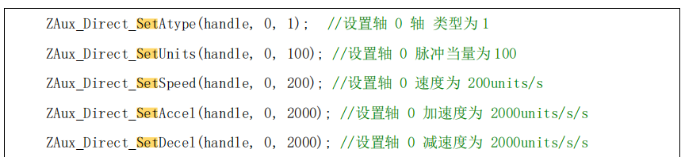
通過上述C#單軸例程進行參數設置之后,RTSys中軸參數會實時同步數據。
此時通過上述C#上位機控制軸運動,在該界面可對軸運行進行實時監控,通過DPOS監控是否有脈沖發出以及MPOS參數監控軸是否有實際動作,是否有位置反饋等。
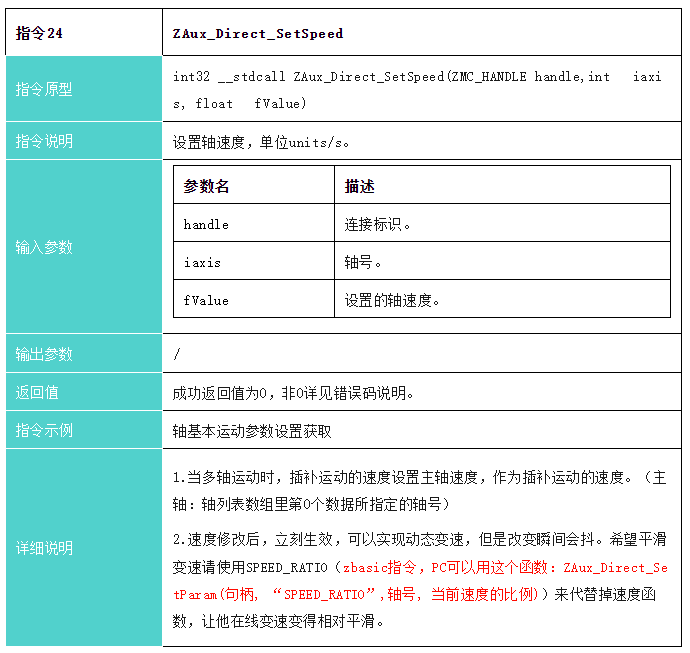
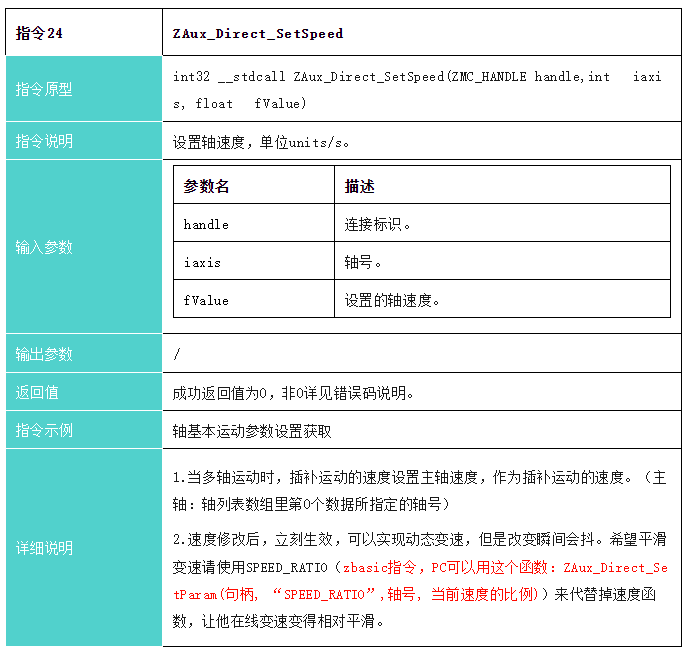
通過ZAux_Direct_SetSpeed指令在上位機設置軸速度之后,實際軸速度變化不大;這個時候,我們可以在軸參數界面找到SPEED值,看是否和上位機設置的值一樣,進而排查上位機速度值是否寫進去。
3、手動運動界面
通過RTSys軟件進行手動運動調試:
點擊RTSys菜單欄的工具按鈕,選擇手動運動,彈出手動運動界面,功能具體如下圖。

4、IO操作界面
點擊RTSys菜單欄工具按鈕,打開“輸入口”和“輸出口"界面進行IO口的監控與調試。點擊IO選擇可手動選擇想要監控的IO編號范圍。
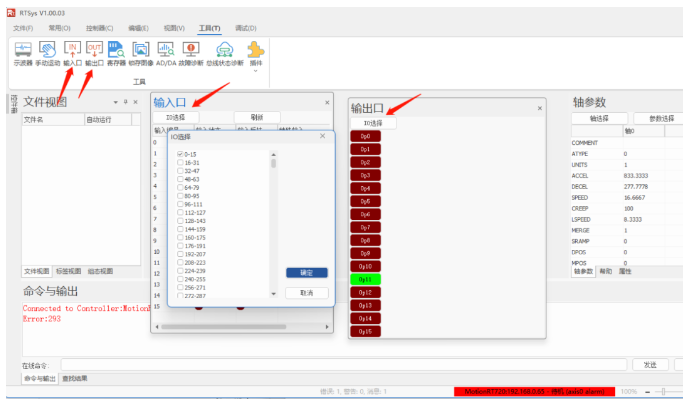
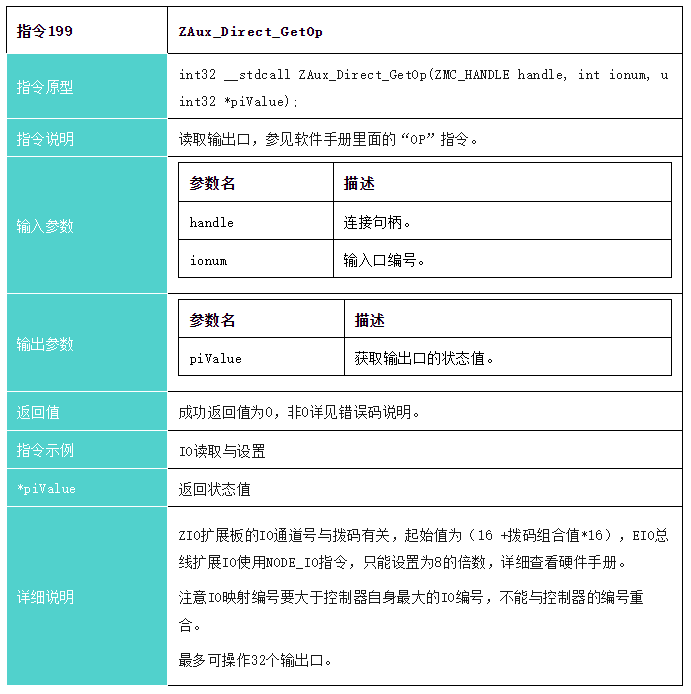
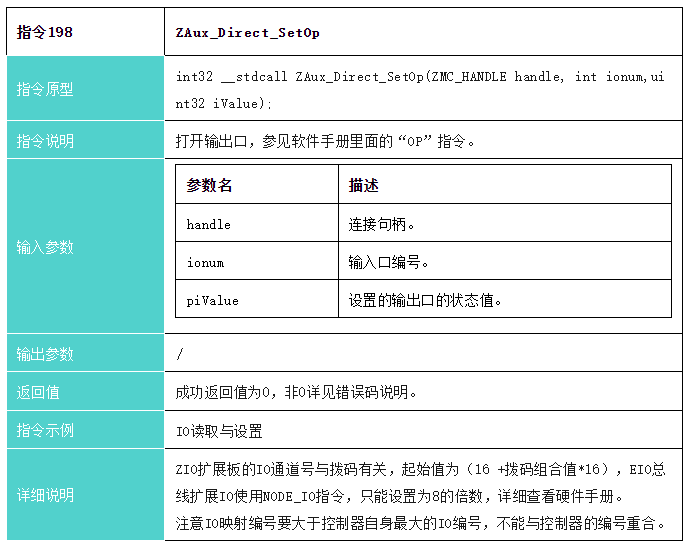
上位機使用ZAux_Direct_GetIn指令讀取輸入口的狀態,通過ZAux_Direct_GetOp指令讀取輸出口狀態以及ZAux_Direct_SetOp指令設置輸出口狀態。
通過上位機指令設置對應的IO口之后,這時候要確認上位機是否操作成功,打開IO操作界面的輸入口和輸出口即可對其進行監控與設置。
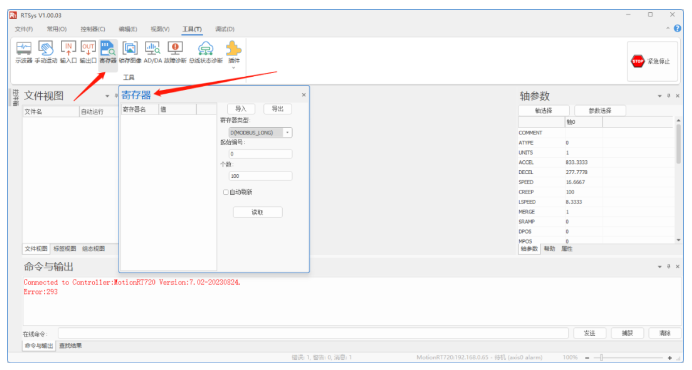
4、寄存器界面
點擊RTSys菜單欄的工具,打開寄存器界面,點擊該界面的寄存器類型下拉框,可監控或設置MODBUS、VR、TABLE等寄存器的值。
該界面的“起始編號”指監控對應寄存器的起始編號。“個數”表示監控的對應寄存器從起始編號開始,監控的寄存器個數。
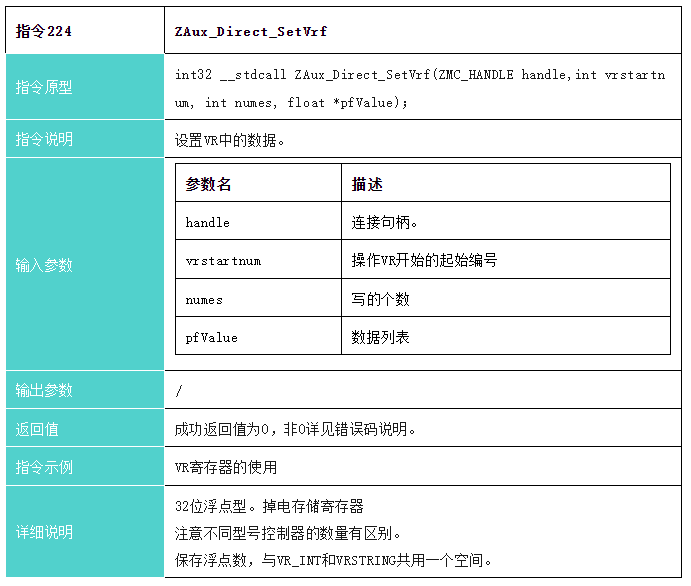
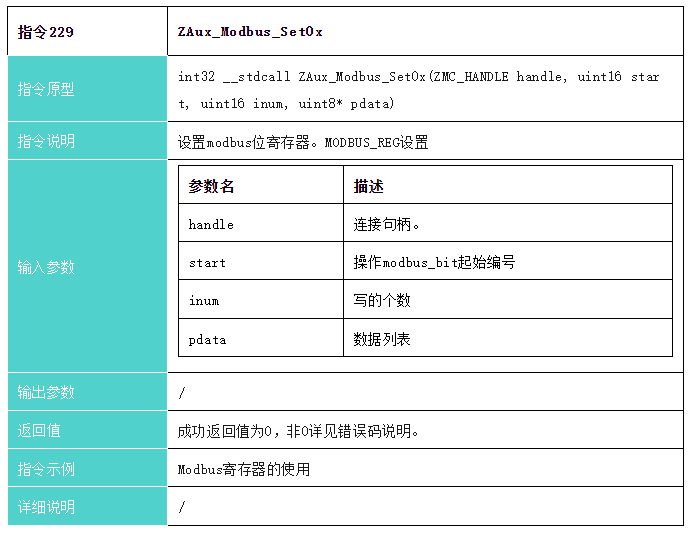
上位機使用ZAux_Direct_MoveTable緩沖修改table寄存器的值,ZAux_Direct_SetVrf指令修改VR寄存器的值,以及ZAux_Modbus_Set0x指令修改modbus位寄存器的值以及其他寄存器的讀寫操作。上位機設置完對應寄存器之后,便可打開寄存器界面判斷相關寄存器的值是否寫成功。
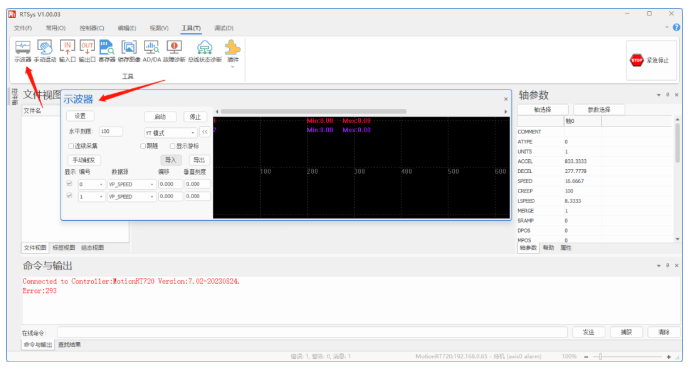
5、示波器界面
點擊RTSys菜單欄的工具,打開示波器界面,可對運動過程中的一些參數進行波形的抓取。
示波器的操作方法:在RTSys編寫好程序后,成功連接到控制器/仿真器后,打開示波器,設置好所需采集的數據源及對應編號,點擊“啟動”,再將程序下載至RAM/ROM(上位機編程直接編譯運行上位機代碼),即可采樣
按以上操作程序里需加入“TRIGGER”指令自動觸發示波器采樣。否則,需在點擊“啟動”后,點擊“手動觸發”再下載程序至RAM/ROM才可成功采樣。
示波器界面功能說明:
(1)設置:打開示波器設置窗口,設置示波器相關參數。
(2)啟動:啟動示波器(但不觸發示波器采樣)。
(3)停止:停止示波器采樣。
(4)YT模式:有三種模式可切換,包括YT模式、XY模式、XYZ模式。切換成XY模式即XY平面顯示兩個軸的插補合成軌跡。XYZ模式即XYZ三維平面顯示合成軌跡。
(5)<<:按下隱藏通道名稱和峰值,只顯示通道編號。
(6)連續采集:不開啟連續采集時,到達采集深度后便停止采集,開啟了連續采集之后示波器會持續采樣。
(7)跟隨:開啟跟隨后橫軸自動移動到實時采樣處,跟隨波形顯示。
(8)顯示游標:用于標定測量示波器圖形數據或者是坐標距離。在YT模式中使用該工具可測量兩點之間所用時間,在XY模式中則測量坐標間距。X1和X2游標線與波形相交的交點橫坐標即為通道(x)顯示的數據,Y1和Y2游標線與波形相交的交點縱坐標即為通道(Y)顯示的數據。
(9)手動觸發:手動觸發示波器采樣按鈕(自動觸發使用trigger指令)。
(10)顯示:選擇當前通道曲線是否顯示。
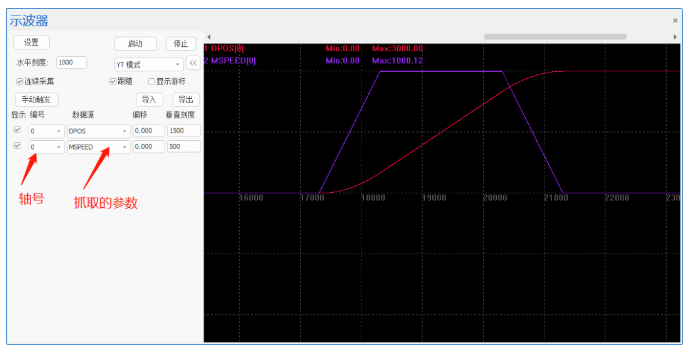
(11)編號:選擇需要采集的數據源編號,如軸號、數字量IO編號、TABLE編號、VR編號、MODBUS編號等。
(12)數據源:選擇采集的數據類型,下拉菜單選擇,多種類型參數可選。
(13)偏移:波形縱軸偏移量設置。
(14)垂至刻度:縱軸一格的刻度。
(15)水平刻度:橫軸一格的刻度。
注:若要設置示波器參數,如軸編號、數據源以及啟動示波器設置窗口,要先停止示波器再設置。
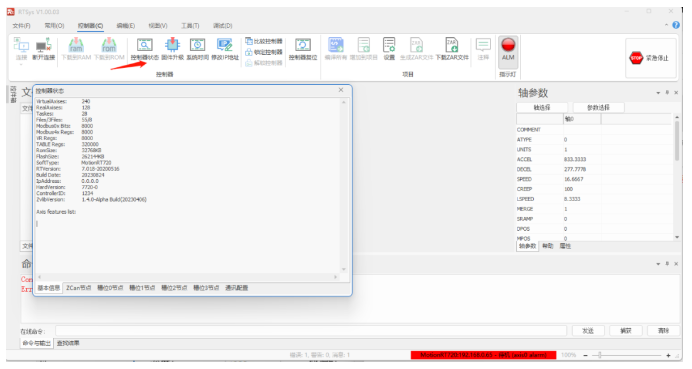
6、控制器狀態
點擊RTSys菜單欄的控制器選項,點擊控制器狀態,打開控制器狀態顯示窗口。該狀態包括基本信息、Zcan節點信息、槽位0節點信息、控制器通訊配置等內容。
(1)基本信息:包括控制器型號、支持最大任務數、IP地址、軟硬件版本號等控制器基本信息。
(2)Zcan節點:在該界面可顯示控制器的本地資源,包括軸數、數字量個數以及模擬量個數,還可顯示通過CAN接口擴展的板卡信息。
(3)槽位0節點:顯示通過EtherCat口所接的設備的節點號、設備ID、撥碼號等信息。
(4)控制器通訊配置:顯示CAN信息與RS232、RS485、RS422串口配置信息。
使用上述上位機單軸運動例程抓取軸0指令位置(DPOS)以及軸實際反饋速度(MSPEED)曲線時,先打開示波器界面,設置好抓取的軸號,以及選擇需要抓取的參數,設置完成之后,選擇YT模式,點擊啟動,點擊手動觸發,最后運行上位機程序,抓取波形圖如下所示。
本次,正運動技術EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(五):通過RTSys進行調試與診斷,就分享到這里。更多精彩內容請關注“正運動小助手”公眾號。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
448瀏覽量
25246 -
運動控制卡
+關注
關注
7文章
119瀏覽量
15822 -
ethercat
+關注
關注
19文章
1093瀏覽量
39944
發布評論請先 登錄
EtherCAT運動控制卡XPCIE1032H上位機開發(一):驅動安裝

單軸PSO視覺飛拍與精準輸出:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(七)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(九)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十三)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十四)



不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!

XPCIE1028超高速實時運動控制卡簡介和應用案例

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(一):驅動安裝與建立連接
EtherCAT超高速實時運動控制卡(二):EtherCAT總線初始化

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發





 工商網監
工商網監
評論