 設計制作一個運動目標控制與自動追蹤系統
設計制作一個運動目標控制與自動追蹤系統

一、任務
設計制作一個運動目標控制與自動追蹤系統。系統包括:
01
02
指示自動追蹤的綠色光斑位置控制系統。
系統結構示意及擺放位置見圖 1(a)。
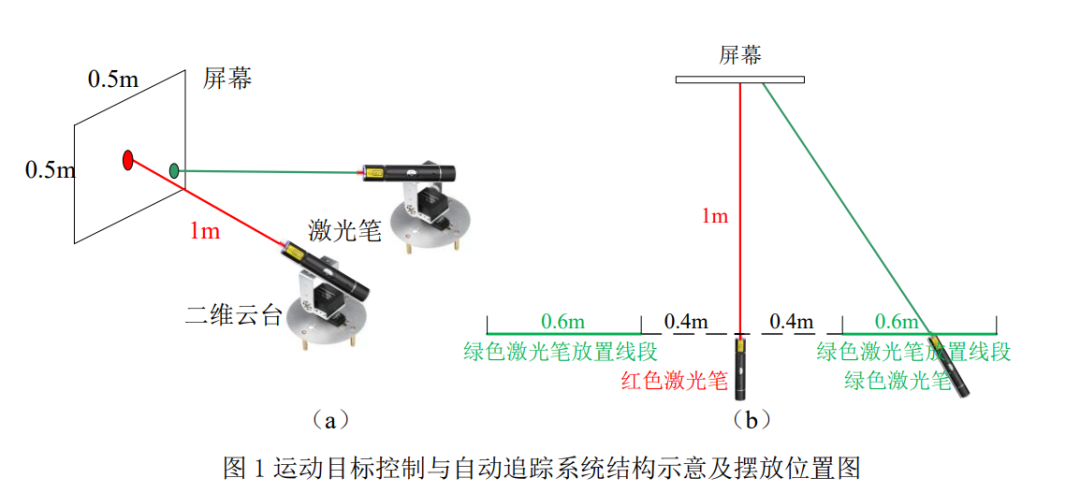
圖中兩個激光筆固定在各自獨立的二維電控云臺上。
紅色激光筆發射的光斑用來模擬運動目標。光斑落在正前方距離 1m 處的白色屏幕上,光斑直徑≤1cm。紅色光斑位置控制系統控制光斑能在屏幕范圍內任意移動。
綠色激光筆發射的光斑由綠色光斑位置系統控制,用于自動追蹤屏幕上的紅色光斑,指示目標的自動追蹤效果,光斑直徑≤1cm。
綠色激光筆放置線段如圖 1(b)所示。
該線段與屏幕平行,位于紅色激光筆兩側,距紅色激光筆距離大于 0.4m、小于 1m。
綠色激光筆在兩個放置線段上任意放置。
屏幕為白色,有效面積大于 0.6╳0.6m2。
用鉛筆在屏幕中心畫出一個邊長0.5m的正方形,標識屏幕的邊線;所畫的正方形的中心為原點,用鉛筆畫出原點位置,所用鉛筆痕跡寬≤1mm。
二、要求
01
設置運動目標位置復位功能。
執行此功能,紅色光斑能從屏幕任意位置回到原點。
光斑中心距原點誤差≤2cm。
02
啟動運動目標控制系統。
紅色光斑能在 30 秒內沿屏幕四周邊線順時針移動一周,移動時光斑中心距邊線距離≤2cm。
03
用約1.8cm寬的黑色電工膠帶沿A4紙四邊貼一個長方形,構成A4靶紙。
將此A4靶紙貼在屏幕自定的位置。
啟動運動目標控制系統,紅色光斑能在30秒內沿膠帶順時針移動一周。
超時不得分,光斑完全脫離膠帶一次扣2分,連續脫離膠帶移動5cm以上記為0分。
04
將上述 A4 靶紙以任意旋轉角度貼在屏幕任意位置。啟動運動目標控制系統,要求同(3)。
設計要求
一、運動目標控制理論
在運動控制系統中,基于OpenMV識別目標點及軌跡并傳送坐標數據給MCU,由主控MCU調整PWM輸出占空比實現對舵機運動參數的調整,從而控制云臺轉動實現對運動目標的復位、軌跡移動、循跡等功能。首先,將OpenMV固定在合適位置以觀測到完整的目標屏幕,利用OpenMV識別紅色激光返回的坐標點(以下簡稱紅斑),將激光筆依次在屏幕上移動。基于基礎題2要求,用激光筆在屏幕鉛筆畫的邊線上標記8個坐標點(擁有四個頂點,每兩個頂點之間各取一個中點),分別按下按鍵記錄坐標在MCU中,最后控制二維云臺依次將記錄的每一個點都走一遍。(運動目標控制皆使用記錄坐標構建坐標系的方法)
對于運動控制系統的循跡功能(基礎題目3,4),需要通過OpenMV完成對黑色A4紙邊框的識別以確定矩形頂點坐標,利用頂點坐標分別計算出矩形四條邊框斜率,基于頂點及邊框斜率計算得到每條邊框上的20個標記點(經過測試,20個標記點效果較為理想)。最后識別紅斑坐標,控制二維云臺依次沿標記點完成移動,即可實現對黑色矩形的循跡功能。
二、自動追蹤系統方法
在自動追蹤系統中,OpenMV需要完成對紅斑以及綠色激光筆的識別(以下簡稱綠斑),因此需要單獨將OpenMV固定在二維云臺旁邊,不隨云臺移動。OpenMV將識別d的坐標數據通過串口返回到主控端,系統中對紅斑和綠斑設定有不同的幀頭幀尾防止誤判,主控接收到坐標數據之后再分別對它們的橫縱坐標值相減以獲取兩運動目標的相對距離。根據兩坐標差值的正負,可獲知兩光斑的相對坐標位置。這時只需要利用紅色和綠色X、Y軸的差值,最后控制二維云臺的x,y軸增加或者減小角度即可。
在測試過程中,發現PWM舵機偶爾莫名抖動,分析這是由于坐標數據存在噪聲導致。因此,本項目中采用采用卡爾曼濾波對OpenMV傳送的坐標數據進行對其濾波,具體公式如下:

從而讓OpenMV反饋回來的坐標與驅動MG995舵機變得更加穩定,能夠完成設計要求。
A:狀態轉移矩陣
X(k-1):k-1時刻 狀態最優估計值 B:控制輸入矩陣
U(k):k時刻 狀態輸入控制量
W(k):k時刻 卡爾曼增益
設計圖
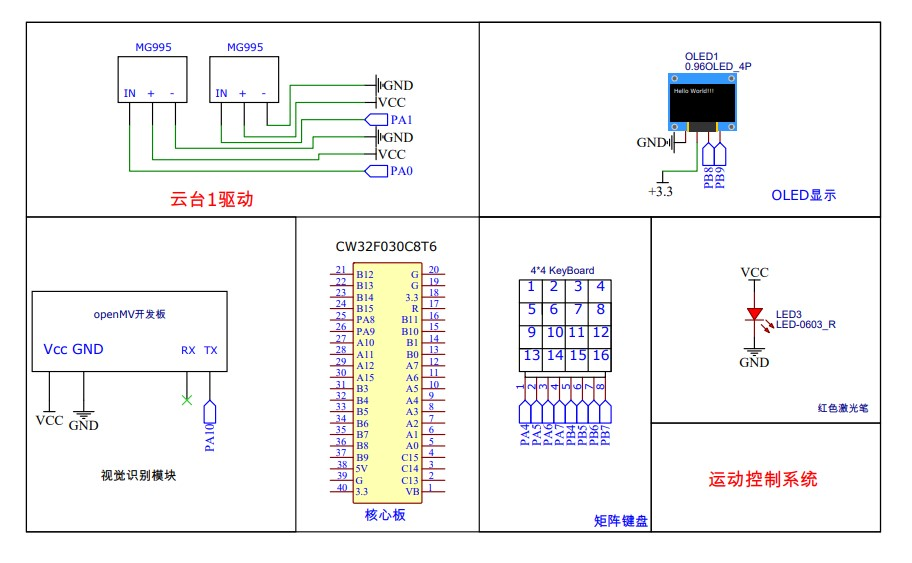
運動控制系統硬件原理圖
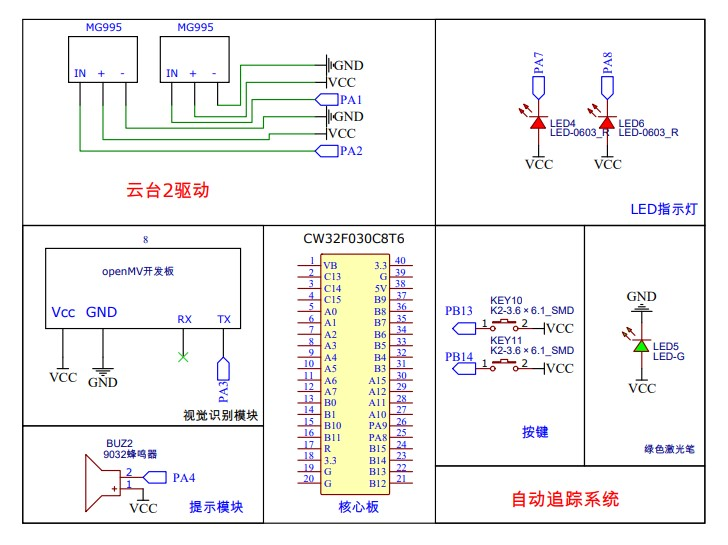
自動追蹤系統硬件原理圖
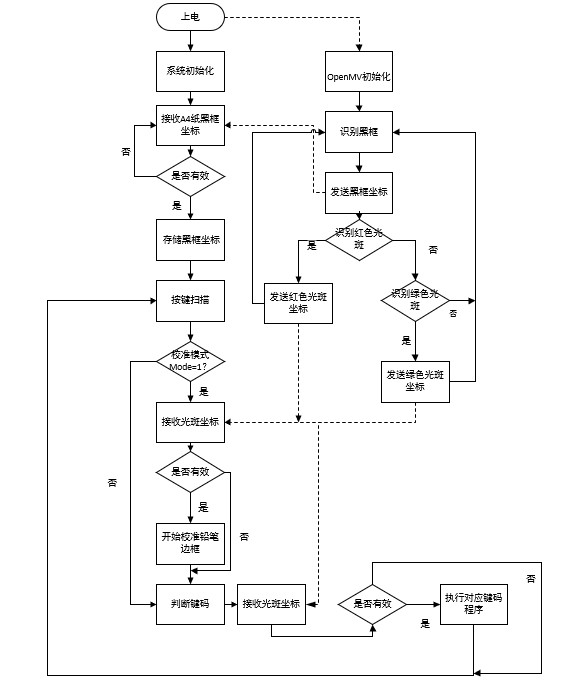
控制程序流程圖
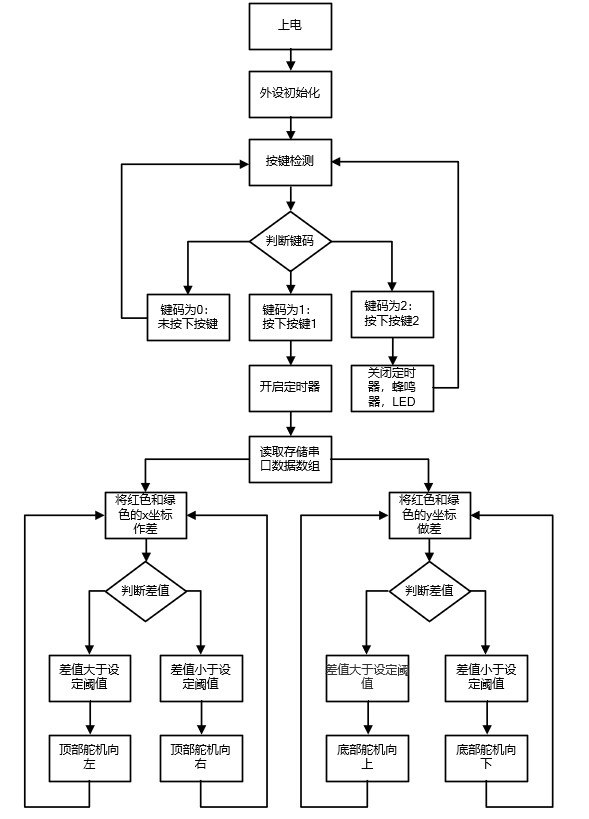
自動跟蹤系統主流程圖
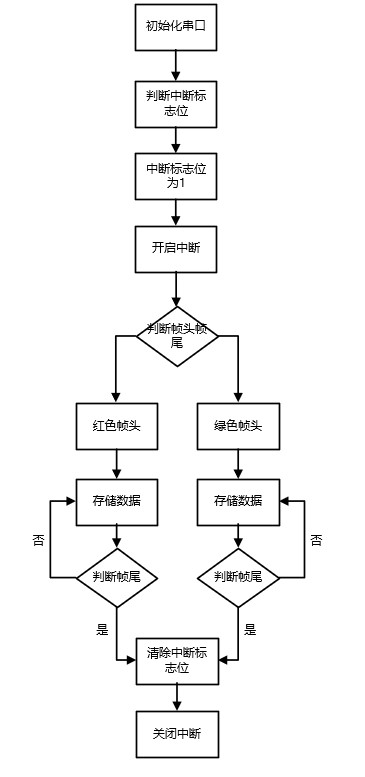
自動跟蹤系統串口流程
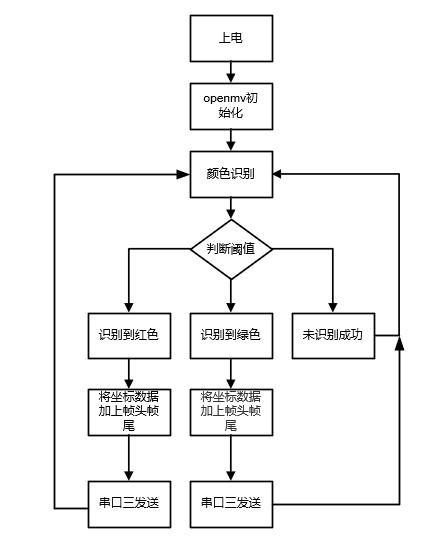
自動跟蹤系統OpenMV流程圖
審核編輯:劉清
-
mcu
+關注
關注
146文章
17955瀏覽量
365755 -
占空比
+關注
關注
0文章
112瀏覽量
29550 -
運動控制
+關注
關注
4文章
655瀏覽量
33517 -
PWM輸出
+關注
關注
1文章
66瀏覽量
6340 -
openMV
+關注
關注
3文章
40瀏覽量
10298
原文標題:CW32運動目標控制與自動追蹤系統榮獲2023年電賽E題全國二等獎!
文章出處:【微信號:武漢芯源半導體,微信公眾號:武漢芯源半導體】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄



運動控制軸和單軸控制區別怎么選?工業自動化工程師一文講透!

運動場館智慧照明控制系統
如何制作和控制一只仿生手

一個樹莓派,是如何同時實現飛機追蹤、氣象監測、家居控制?

無人機低延時目標跟蹤識別智算系統


基于國產化鴻道Intewell操作系統的高性能實時運動控制解決方案





 工商網監
工商網監
評論