") 什么是RTK?RTK的原理是什么?RTK對于無人機(jī)來說有什么用?
什么是RTK?RTK的原理是什么?RTK對于無人機(jī)來說有什么用?

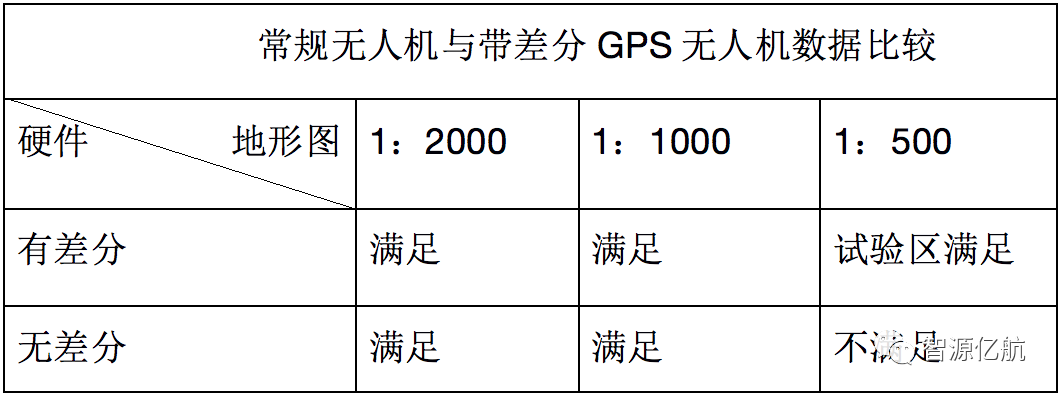
為了加快作業(yè)效率,測繪無人機(jī)采用RTK差分定位系統(tǒng)。據(jù)悉,如果采用普通GPS定位,為了校正誤差還需要派人去實(shí)地布設(shè)若干個(gè)像控點(diǎn);而RTK可實(shí)現(xiàn)厘米級定位,用了RTK則可以基本不用,或者只需要少量像控點(diǎn)。數(shù)據(jù)顯示:無人機(jī)裝載差分GPS后,在精度要求保持不變的前提下,相同測區(qū)控制點(diǎn)數(shù)量可以減少70%到80%。
第一:什么是RTK?
RTK(Real -time kinemaTIc)定位技術(shù),是基于載波相位觀測值的實(shí)時(shí)動(dòng)態(tài)定位技術(shù),能夠?qū)崟r(shí)地提供測站點(diǎn)在指定坐標(biāo)系中的三維定位結(jié)果,并達(dá)到厘米級精度。
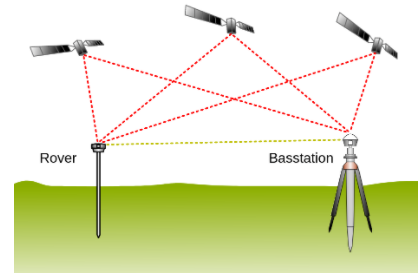
第二:RTK的原理是什么?
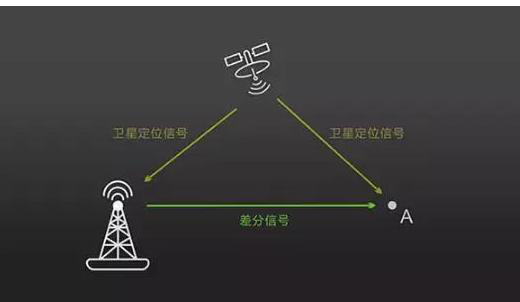
如上圖所示,基站與A點(diǎn)的距離比較近,因此他們接收衛(wèi)星信號時(shí)受到的大氣層影響也基本接近,基站本身已知所處位置的坐標(biāo),在得到衛(wèi)星信號提供的坐標(biāo)之后與原數(shù)據(jù)做新差分,并將差分的結(jié)果告知A點(diǎn),因此A點(diǎn)也可以得到高精度的結(jié)果。
第三:RTK對于無人機(jī)來說有什么用?
自從遇到無人機(jī),RTK技術(shù)在無人機(jī)上的應(yīng)用很火。在農(nóng)業(yè)植保領(lǐng)域,RTK能為無人機(jī)提高定位精度,降低飛行誤差。由于衛(wèi)星信號的多路徑效應(yīng)以及大氣中對衛(wèi)星信號的折射和反射,當(dāng)農(nóng)田周邊出現(xiàn)防風(fēng)林或者天氣環(huán)境影響時(shí),衛(wèi)星的定位精度就會(huì)降低,導(dǎo)致作業(yè)中的無人機(jī)出現(xiàn)航線偏移,從而產(chǎn)生風(fēng)險(xiǎn):使用普通GPS進(jìn)行定位,航線偏移的誤差甚至可達(dá)10m左右,這種偏移量,可能導(dǎo)致植保無人機(jī)撞上防風(fēng)林或者其他事故發(fā)生,根本無法實(shí)現(xiàn)自主飛行。
通過下圖先了解一下GPS和RTK定位的特點(diǎn):
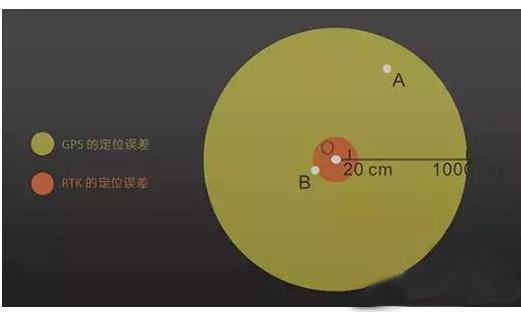
普通GPS的圓概率誤差(CEP)有50%左右的概率在2.5m以內(nèi),另外50%的誤差可能更大甚至接近10m。上圖中,當(dāng)我們想要尋找O點(diǎn)的位置時(shí),普通GPS會(huì)認(rèn)為O點(diǎn)在A處,而A是黃圈直徑10m范圍內(nèi)的任意一點(diǎn)。RTK通過實(shí)時(shí)差分技術(shù),可以將范圍縮小到10cm內(nèi)。
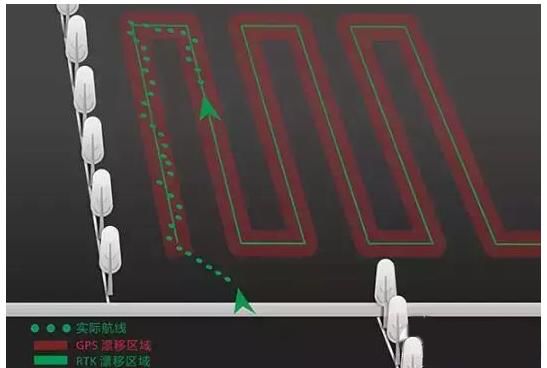
飛機(jī)在作業(yè)時(shí)獲取到的航線坐標(biāo)并不是一條直線,而是一個(gè)有寬度的區(qū)域,如果使用GPS定位進(jìn)行航線作業(yè),則區(qū)域的寬度在010m的范圍內(nèi),此時(shí)飛機(jī)實(shí)際飛行的軌跡將會(huì)是一條歪歪扭扭的曲線,并且每一次飛行的曲線都不一致。而使用RTK技術(shù)時(shí),航線將是一個(gè)010cm寬度的區(qū)域,與GPS相比,RTK基本等于是直線飛行,彎曲的幅度很小,因此效果將更均勻可控。
無人機(jī)差分技術(shù)是通過差分GPS與無人機(jī)控制系統(tǒng)相結(jié)合,實(shí)現(xiàn)在航拍過程中,高分辨率照片的獲取,同時(shí)也可以獲得相應(yīng)航拍影像的精準(zhǔn)坐標(biāo)及高程信息。在航拍圖像處理時(shí),將差分?jǐn)?shù)據(jù)與地面控制點(diǎn)相結(jié)合,對圖像進(jìn)行聯(lián)合平差,從而實(shí)現(xiàn)使用少量控制點(diǎn),獲取更高精度的地形圖,從而節(jié)約成本,提高制圖精度。
植保無人機(jī):在一些壟間距較大的田間作業(yè)時(shí),如發(fā)生的偏移較大,甚至可能產(chǎn)生作物本身大部分漏噴和土地污染等次生危害。可以說,RTK通過大幅提高定位精度來拓寬GPS定位技術(shù)的應(yīng)用場景。在未來的農(nóng)田里,RTK會(huì)有更多用武之地:將融入作物生長的每一個(gè)階段,幫助我們實(shí)時(shí)獲取農(nóng)田中任意位置的時(shí)間和空間信息,再搭配對應(yīng)的設(shè)備,實(shí)現(xiàn)定時(shí)、定點(diǎn)、定量的農(nóng)藥化肥投放,取得最佳的經(jīng)濟(jì)效益和環(huán)境效益。除了植保作業(yè)外,高精度的實(shí)時(shí)定位還可以協(xié)助農(nóng)村土地測量、確權(quán)和提供其他農(nóng)田中的無人自動(dòng)化設(shè)備高精度導(dǎo)航與數(shù)據(jù)服務(wù)。
第四:在植保無人機(jī)上使用RTK技術(shù)存在哪些問題?
1、基站的設(shè)置及作業(yè)半徑對RTK的測量精度和作業(yè)速度有直接影響。基準(zhǔn)站應(yīng)盡量架設(shè)在地勢較高的地方,且要遠(yuǎn)離強(qiáng)電磁干擾源和大面積的信號反射物。
2、RTK技術(shù)是依賴于GPS衛(wèi)星定位的,使用時(shí)要有四顆以上衛(wèi)星相位觀測值的跟蹤和必要的幾何圖形,如果所在地本身接受GPS的信號就很差,那RTK也起不到作用。另外,在有大面積的信號反射物的地方是無法定位的,如高層建筑附近,茂密的森林等;強(qiáng)電磁源也會(huì)干擾信號,如高壓輸電線附近,變電站等,在云層較厚的時(shí)候也有影響。
-
gps
+關(guān)注
關(guān)注
22文章
2986瀏覽量
169314 -
定位系統(tǒng)
+關(guān)注
關(guān)注
10文章
623瀏覽量
36949 -
無人機(jī)
+關(guān)注
關(guān)注
231文章
10839瀏覽量
186712 -
RTK
+關(guān)注
關(guān)注
8文章
157瀏覽量
38152 -
差分定位
+關(guān)注
關(guān)注
0文章
15瀏覽量
7944
原文標(biāo)題:知識點(diǎn)Get!行業(yè)無人機(jī)上RTK到底有什么用?
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于RTK GPS和圖像識別的無人機(jī)精準(zhǔn)降落方案
XSENS推出新款兼容RTK的慣性傳感器產(chǎn)品
熟悉RTK算法原理和調(diào)試
RTK差分共享貓工作原理
Arduino RTK2 GPS模塊的資料合集
利用DJIMatrice210 RTK 無人機(jī)檢查輸電塔的損壞情況
小松聯(lián)合Skycatch推出Explore1高精度RTK無人機(jī)
無人機(jī)管家免費(fèi)開放精靈4RTK機(jī)型的后差分解算功能
測繪無人機(jī)上RTK到底有什么意義
無人機(jī)中的RTK差分定位技術(shù)解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論