") 康謀分享 | aiSim5 物理相機(jī)傳感器模型驗證方法(一)
康謀分享 | aiSim5 物理相機(jī)傳感器模型驗證方法(一)

摘要:
aiSim5可以實時模擬復(fù)雜的傳感器配置,在多GPU分布式渲支持的支持下,aiSim可以渲染20多個攝像頭、10多個雷達(dá)和10多個激光雷達(dá)在同一環(huán)境下運(yùn)行。aiSim5獨有的實時渲染引擎能夠滿足對物理精確環(huán)境和天氣模擬的所有要求,具有完全的決定性和可重復(fù)性。
 圖1:aiSim 重建場景
圖1:aiSim 重建場景 圖2:真實場景
圖2:真實場景aiSim5基于物理的相機(jī)模型將會通過以下方法驗證其與真實世界的相關(guān)性:
一、光照度測試
aiSim 擁有內(nèi)置的光照度傳感器,因此可以使用光照度傳感器對aiSim的照明模型和材質(zhì)進(jìn)行端到端的驗證。
1、案例1
在 aiSim 中重新模擬一個高速公路場景,并匹配相應(yīng)的天氣效果。
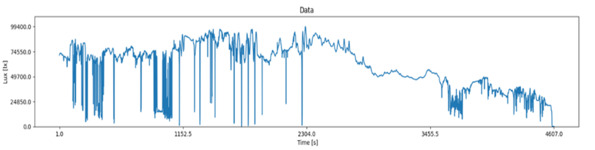 ?圖3
?圖3目前正在 aiSim 中重建這一場景并測試這一光照度測量結(jié)果。
2、案例2
驗證人工照明模型以及aiSim車庫地圖的相關(guān)性時,可以在車庫使用匹配的光照屬性進(jìn)行重新模擬,aiSim 中會產(chǎn)生相似的結(jié)果。
 ?圖4:真實世界中進(jìn)行傳感器標(biāo)定的場景
?圖4:真實世界中進(jìn)行傳感器標(biāo)定的場景 圖5:aiSim中搭建的用于相機(jī)標(biāo)定車庫場景
圖5:aiSim中搭建的用于相機(jī)標(biāo)定車庫場景二、色彩校準(zhǔn)測試
1、簡介
在進(jìn)行相機(jī)圖像匹配時,使用Color Correction Matrix (CCM) 是一種有效的方法,可以通過對已知相機(jī)拍攝的參考照片和aiSim渲染的Macbeth色板圖表進(jìn)行比較來計算CCM。
 圖6
圖6 圖7
圖72、具體步驟
- 準(zhǔn)備參考照片:首先,需要一張使用已知相機(jī)拍攝的Macbeth色板的照片。Macbeth色板是一個標(biāo)準(zhǔn)化的顏色樣本集,通常用于色彩管理和校準(zhǔn)。
- 獲取aiSim渲染的Macbeth色板:接著,你需要在aiSim中創(chuàng)建一個Macbeth色板的渲染圖。確保渲染環(huán)境的光照條件與參考照片盡可能一致,以便更準(zhǔn)確地匹配顏色。
- 應(yīng)用CCM:計算出CCM后,aiSim可以將其應(yīng)用于aiSim的圖像輸出,進(jìn)行顏色校正。
- 驗證和調(diào)整:應(yīng)用CCM后,比較aiSim輸出的顏色與參考照片的顏色。如果存在差異,可能需要進(jìn)一步調(diào)整CCM的參數(shù)或重新計算,直到達(dá)到滿意的匹配效果。
通過這種方法,可以確保aiSim的輸出顏色與實際拍攝的照片顏色盡可能一致,從而提高圖像的真實性和準(zhǔn)確性。
三、離線仿真器驗證
1、簡介
也可以采用基于物理的渲染(PBR)離線渲染器進(jìn)行比較。
2、具體步驟
- 構(gòu)建相同樣本場景:在aiSim和參考渲染器中構(gòu)建相同的樣本場景。這包括場景中的所有物體、材質(zhì)、光照條件等,以確保兩個環(huán)境中的變量盡可能一致。
- 使用相同的相機(jī)參數(shù):使用相同的相機(jī)外部參數(shù)(extrinsic)和內(nèi)部參數(shù)(intrinsic)來拍攝場景。外部參數(shù)涉及相機(jī)在世界空間中的位置和方向,而內(nèi)部參數(shù)則包括焦距、畸變等相機(jī)特有的屬性。
- 進(jìn)行HDR或LDR驗證:無論是高動態(tài)范圍(HDR)還是低動態(tài)范圍(LDR)驗證,都可以用于比較兩個渲染器生成的圖像。選擇哪種驗證方式取決于場景的光照條件和所需的驗證精度。
- 比較生成圖像的差異:對aiSim生成的圖像和參考渲染器生成的圖像進(jìn)行比較。可以通過視覺檢查或使用圖像分析工具來量化差異,如計算顏色偏差、亮度對比度等。
- 多場景驗證:通過多個不同的場景來驗證系統(tǒng)的不同部分,例如只驗證人工光源,或者只驗證天空和太陽的效果等。可以幫助識別和隔離特定問題,提高驗證的針對性和效率。
以上方法均適用于驗證aiSim相機(jī)傳感器模型與現(xiàn)實世界或高精度的離線渲染器的相關(guān)性。
-
傳感器
+關(guān)注
關(guān)注
2565文章
52930瀏覽量
766839 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14305瀏覽量
170514 -
汽車自動駕駛
+關(guān)注
關(guān)注
0文章
12瀏覽量
3806
發(fā)布評論請先 登錄
康謀加入ASAM組織,自動駕駛仿真平臺aiSim引領(lǐng)安全新標(biāo)桿
康謀分享 | 物理級傳感器仿真:破解自動駕駛長尾場景驗證難題

康謀分享 | 基于多傳感器數(shù)據(jù)的自動駕駛仿真確定性驗證

改進(jìn)電壓模型的異步電機(jī)無速度傳感器矢量控制
康謀分享 | 自動駕駛仿真進(jìn)入“標(biāo)準(zhǔn)時代”:aiSim全面對接ASAM OpenX

深謀科技獨樹一幟,發(fā)布高精度壓電式六維力傳感器“彈起”,滿足多領(lǐng)域高動態(tài)力控需求

深度剖析傳感器仿真
康謀應(yīng)用 | 基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng)

康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關(guān)鍵技術(shù)

康謀方案 | 基于AI自適應(yīng)迭代的邊緣場景探索方案
激光位移傳感器的校準(zhǔn)方法
線性傳感器和非線性傳感器的區(qū)別
康謀技術(shù) | 毫米波雷達(dá)技術(shù)解析

康謀分享 | 汽車仿真與AI的結(jié)合應(yīng)用

康謀技術(shù) | 自動駕駛傳感器標(biāo)定技術(shù):從單一到聯(lián)合標(biāo)定






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論