 【技術分享】汽車電子之LIN協議
【技術分享】汽車電子之LIN協議

導讀
LIN協議在汽車電子網絡通訊中廣泛使用,很多用戶在解碼LIN協議時,對LIN協議不同版本間的差異不太熟悉,可能導致解碼中出現數據長度識別和校驗混亂。
 ?LIN協議起源
?LIN協議起源
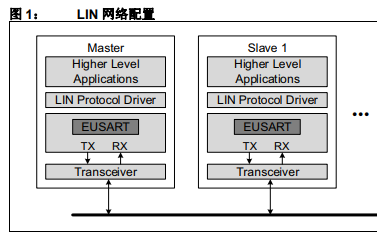
LIN是面向汽車底端分布式應用的低成本、低速率的串行通信總線,屬于局部互聯網。
LIN由汽車行業開發,用作經濟高效的子總線系統,其屬于CAN的下層網絡,是SAE規范的汽車A類網絡,適用于對總線性能要求不高的車身系統,如車門、車窗、燈光等智能傳感器、執行器的連接和控制,LIN實現了一種具有成本效益的智能傳感器和執行器的通訊方式。
LIN聯盟成立于1999年,并發布了LIN1.0版本。最初的成員有奧迪、寶馬、克萊斯勒、摩托羅拉、博世、大眾和沃爾沃等。
?LIN協議的數據幀結構
LIN協議數據幀結構如圖3所示。
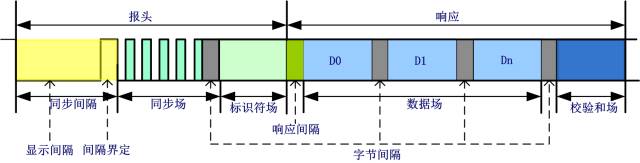
圖3 LIN協議數據幀結構從圖3中可以看到LIN協議數據幀結構由報文頭、響應報文以及幀間隔組成。其中:
報文頭包含同步間隙、同步域和報文標識符場(0~63)。
響應報文由1-9個字節構成:其中2、4或8個字節的數據場和1個校驗和場(LIN1.3)。
報文幀之間有幀間間隔分隔。
報文與響應之間有幀內響應空間分隔。
最小幀間間隔和幀內響應空間均為0。
最大長度收到報文幀的最大長度FRAME_max限制。
那為什么用戶解碼LIN協議會出現數據長度識別錯誤和校驗解碼出錯問題呢?原因是使用了與輸入信號不對應的LIN協議版本進行解碼,不同版本的LIN協議存在差異,如下所述。
 LIN2.0相對于LIN1.3最主要的差異
LIN2.0相對于LIN1.3最主要的差異
支持最多8個字節的數據序列。
取消了受保護標識符中的數據長度字段,即傳輸長度不再受限于ID,并將最后一個字節視為校驗和。
校驗和的驗算包括了受保護標識符。
支持自動波特率檢測功能。
對零星幀進行了定義。
網絡管理的定時用秒來定義,而不是用比特數來定義。
簡化狀態管理和直接向網絡匯報,應用變得標準化。
增加強制節點配置命令以及一些可選擇的命令。
增加了診斷功能。
- 從機節點的產品標識已標準化。
對于解碼來說主要關注前三點。 ?致遠電子CANFD/LIN接口卡
USBCANFD-400U是致遠電子最新款國產USB轉CAN FD/LIN接口卡,配套國產汽車總線工具鏈軟件ZXDoc,可以完成各類項目測試,詳情歡迎咨詢我們。

CANFD接口卡USBCANFD-400U
4路CANFD兼容CAN2.0A/B模式收發
2路LIN符合LIN1.x、LIN2.x和SAE J2602規范
ECU刷寫、UDS診斷、仿真、XCP/CCP標定
參考價格:3300元起
-
汽車電子
+關注
關注
3036文章
8294瀏覽量
169875 -
LIN協議
+關注
關注
0文章
9瀏覽量
10922 -
網絡通訊
+關注
關注
0文章
77瀏覽量
11538
發布評論請先 登錄
汽車車載網絡LIN總線詳解
汽車電子產品的分類及嵌入式技術應用
LIN總線特征是什么汽車CAN總線實驗教學系統
哪里可以詳細地學習汽車CAN、LIN總線技術
汽車電子技術之汽車儀表盤MCU變革概述
基于PSoC技術的LIN總線數據分析儀
用于汽車網絡的LIN協議分析
汽車網絡LIN總線協議解析
LIN的介紹和使用Microchip MPLAB 代碼配置器LIN協議棧庫的詳細概述
LIN是低成本網絡中的汽車通訊協議標準規范V1.2
LIN入門基礎之LIN 2.1講解資料下載






 工商網監
工商網監
評論