 虛擬駕駛仿真測試解決方案
虛擬駕駛仿真測試解決方案

概述
隨著智能駕駛系統功能的提升,駕駛員與智能駕駛系統之間的交互功能越來越多,測試的復雜度也越來越高。經緯恒潤推出的虛擬駕駛仿真平臺,可以在實驗室環境下提供逼真的虛擬駕駛場景、虛擬/真實的駕駛座艙環境、動態的駕駛感受,可實現高度沉浸式的駕駛體驗,駕駛員與智能駕駛系統間的交互功能測試、對智能駕駛系統算法的直觀評價和其它與駕駛感受相關的測試等需求。
方案特點
- 通過高性能實時仿真平臺,保證駕駛員體感與視感的一致性
- 提供復雜的車輛動力學仿真軟件,實現車輛姿態模擬包括俯仰、側傾和橫擺等,結合六自由度運動平臺和洗出算法,模擬類實車的體感,使駕駛人員具備更真實的沉浸感,可以進行車輛開發前期的整車駕駛性能體驗和評估
- 提供高逼真的虛擬場景仿真軟件,具備復雜的交通流,可用于駕駛員在復雜交通流中的自然駕駛行為采集,并應用到無人駕駛算法訓練中
- 虛擬駕駛仿真平臺支持與無人駕駛仿真測試系統進行聯合仿真,測試駕駛員行為干預對無人駕駛功能的影響或進行無人駕駛車輛控制效果的主觀評價
- 可以通過將虛擬駕駛仿真平臺與交通參與者進行關聯,實現人類駕駛員與無人駕駛系統的博弈(例如由人類駕駛進出匝道時的插隊車輛與無人駕駛系統進行交互),產生更加真實的交通干擾
- 提供可擴展的無人駕駛的人因工程評估系統,用于分析駕駛員在無人駕駛車輛中的生理特征和行為反應,評估無人駕駛系統對駕駛員的影響
- 虛擬駕駛模擬艙可以基于實車改造,實現逼真的體驗環境,也可以基于用戶需求定制外形開發,滿足不同用戶的需求
- 提供逼真的踏板腳感模擬和方向盤手感模擬
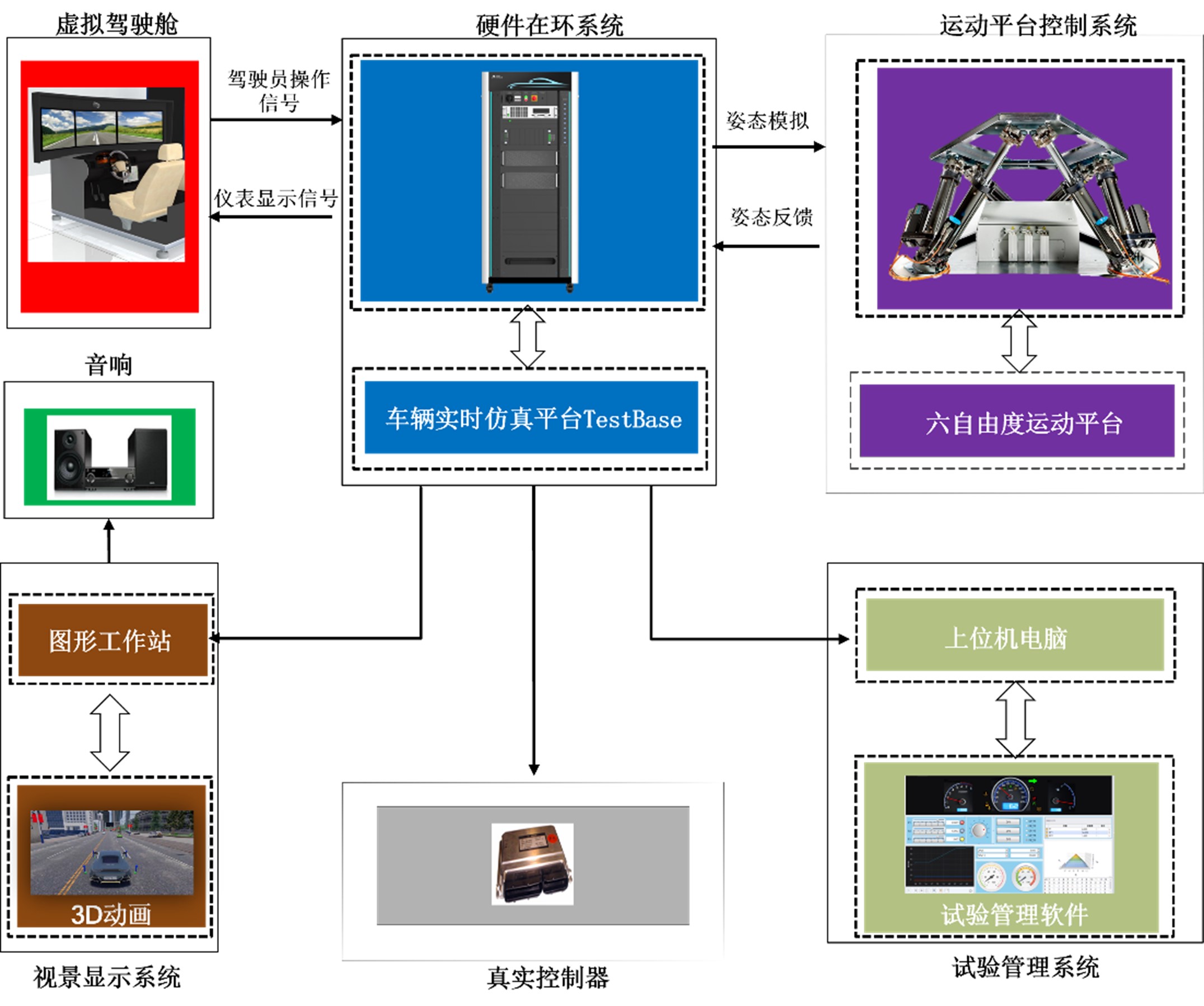
產品組成
- 虛擬駕駛艙:包括方向盤、踏板、檔位等組件,用于駕駛員動作的直接輸入
- 六自由度運動平臺:用于模擬動態駕駛感受
- 場景仿真軟件:用于模擬逼真的駕駛場景
- 車輛動力學模型:用于模擬車輛動力學特性和運動姿態
- 實時仿真系統:用于提供實時仿真環境
典型應用
- 基于某新能源汽車實車改造的動態駕駛模擬器
- 帶某車型設計元素的虛擬動態駕駛艙
- 基于某重卡車頭改造的動態重載駕駛模擬器
- 某高校駕駛員行為研究仿真平臺
- 虛擬駕駛與智能駕駛HIL系統聯合的仿真測試
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
仿真測試
+關注
關注
0文章
98瀏覽量
11561 -
自動駕駛
+關注
關注
788文章
14266瀏覽量
170163 -
虛擬駕駛艙
+關注
關注
0文章
3瀏覽量
1131
發布評論請先 登錄
相關推薦
熱點推薦
虛擬仿真實訓室建設解決方案最新解析
和實踐。廣凌科技虛擬仿真實訓室建設方案,不僅解決了傳統實訓 “高成本、低效率、高風險” 的頑疾,更以數據驅動、模塊化設計和開放平臺為抓手,為院校、企業乃至區域產業

5月22日技術直播分享 | 智能底盤電控產品仿真測試解決方案
本次研討會,經緯恒潤將結合多年汽車電子領域研發和測試的經驗,聚焦底盤技術現狀及測試難點、測試需求及流程分析、SIL/HIL仿真測試

光庭信息在2025上海車展展示先進智能駕駛解決方案
在2025上海車展上,光庭信息通過創新的"實車-車云-數字車"實時聯動系統,展示了先進智能駕駛解決方案。ADAS行泊一體解決方案與數字車虛擬仿真
車聯網HIL仿真測試解決方案
經緯恒潤結合硬件在環技術、通信信息、云平臺、場景仿真、車載單元仿真技術,開發了針對車聯網V2N測試&V2X應用場景測試的仿真系統,實

智能座艙HIL仿真測試解決方案
經緯恒潤結合通信信息、人工智能、工業控制、硬件在環等技術,開發了一套智能座艙仿真測試系統,實現了對整車電氣、人機交互、交通場景和座艙體驗的仿真模擬。系統通過提供觸控模擬,智能識別,場景沉溺和控制閉環

智能駕駛HIL仿真測試解決方案
經緯恒潤推出的新一代自主研發的智能駕駛HIL仿真測試系統可提供:逼真的道路交通場景、高精度的車輛動力學模型和各智能駕駛傳感器仿真/臺架;實驗

設計仿真 | 海克斯康VTD智能駕駛仿真方案—Camera
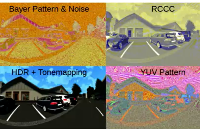
基于逼近真實道路場景的視覺環境,VTD的相機傳感器能夠配置現實世界中真實相機的內參外參,模擬鏡頭畸變、CMOS成像、ISP仿真等多種相機成像數據。不僅能夠模擬虛擬環境中的光照、天氣、物體遮擋等因素,還可以還原真實相機的物理特性,更加貼近真實
12月19日在線研討會 智能座艙仿真測試解決方案
12月19日,經緯恒潤智能座艙仿真團隊將結合實戰項目開發經驗,分享探討智能座艙測試工具鏈以及不同測試場景下的方案選型等內容,旨在探討和分享智能座艙仿
SOA整車電子電氣仿真測試解決方案
經緯恒潤TESTBASE 硬件在環(HIL)仿真測試平臺可以為SOA電子電氣系統提供高效自動化測試的一站式解決方案,為SOA車型電子電氣系統的測試

TOSUN 車載以太網仿真測試解決方案
TOSUN車載以太網仿真測試解決方案隨著自動駕駛、車聯網和智能化系統的廣泛應用,車載電子組件和傳感器的數量與復雜性都在持續增加,為了滿足這些更為復雜性的需求,車載以太網作為一種新型車載

GNSS仿真中的HiL延遲:挑戰、影響與解決方案深度剖析
,還為導航、速度計算和時間同步等關鍵功能提供支持。然而, 在將自動駕駛系統投入實際道路之前,進行全面的仿真測試是至關重要的。 GNSS仿真測試
解決方案丨EasyGo新能源系統實時仿真應用
減少實際測試和試驗的時間和成本。在新能源領域,實時仿真解決方案可以應用于以下方面: ▍儲能系統優化:實時仿真評估儲能性能,優化系統的設計和控制策略,提升儲能效率與穩定性。▍電力電子與發
發表于 10-18 09:37
設計仿真 | 基于VTD的智能大燈仿真測試方案
隨著汽車行業智能化的發展,車燈系統從基礎的功能化照明發展為智能化的視覺交互系統。智能車燈的開發和測試,亟需高效安全的測試方法。以虛擬場景為基礎的仿真
設計仿真 基于VTD的AR-HUD仿真測試解決方案
以虛擬場景為基礎的AR-HUD仿真測試手段,大大提升了產品開發迭代效率,降低開發成本,在行業內得到了越來越多的關注,AR-HUD的仿真測試涵






 工商網監
工商網監
評論