") RTX 5880 Ada 驅(qū)動51Sim實現(xiàn)端到端仿真與數(shù)據(jù)合成新飛躍
RTX 5880 Ada 驅(qū)動51Sim實現(xiàn)端到端仿真與數(shù)據(jù)合成新飛躍

在自動駕駛與智能駕駛技術(shù)蓬勃發(fā)展的當下,仿真測試成為了推動其進步的關(guān)鍵環(huán)節(jié)。自動駕駛仿真平臺能夠在虛擬環(huán)境中模擬各種真實場景,對自動駕駛系統(tǒng)進行全面測試,從而大幅降低實際道路測試的成本與風險。
51Sim 由 51WORLD 于 2017 年孵化,是國內(nèi)領(lǐng)先的 AI 合成數(shù)據(jù)及仿真平臺公司,在智能駕駛仿真和數(shù)據(jù)閉環(huán)領(lǐng)域有著卓越的產(chǎn)品競爭力和商業(yè)化能力。現(xiàn)核心產(chǎn)品包括智能駕駛與機器人仿真平臺 SimOne、數(shù)據(jù)閉環(huán)與合成數(shù)據(jù)平臺 DataOne、交通信息模型平臺 TIM。
SimOne 是 51Sim 于 2017 年研發(fā)推出的具有自主知識產(chǎn)權(quán)的智能駕駛與機器人仿真平臺,集靜態(tài)和動態(tài)數(shù)據(jù)導入、測試場景編輯、傳感器仿真、動力學仿真、回放仿真、虛擬數(shù)據(jù)集生成、在環(huán)測試等于一體,具備全鏈閉環(huán)仿真能力。
來自行業(yè)的 KPI
1
目前,自動駕駛仿真軟件測試遵循一系列行業(yè)標準。
功能測試需遵循 ISO 26262 中自動駕駛功能安全要求,仿真軟件要精準模擬攝像頭圖像采集、雷達距離探測等各類傳感器數(shù)據(jù),以此驗證自動駕駛算法在不同場景下的功能完整性。依據(jù) SAE J3016 對自動駕駛等級的劃分,仿真軟件還應覆蓋 L0 到 L5 各等級所需場景,像城市道路復雜路況、高速自動駕駛場景以及極端天氣特殊場景等。
性能測試方面,幀率穩(wěn)定性、數(shù)據(jù)輸出準確性和延遲時間等指標要求嚴格。在實時性上,常見自動駕駛場景模擬中幀率通常需穩(wěn)定在一定數(shù)值以上(如 30FPS),確保模擬連貫真實。數(shù)據(jù)輸出精度要滿足自動駕駛系統(tǒng)環(huán)境感知需求,保證傳感器數(shù)據(jù)模擬誤差處于可接受范圍。
求真之旅無法繞行的高山
2
物理級精確的仿真場景
為了提升仿真置信度,51Sim 需要保證 SimOne 平臺虛擬場景渲染的精確度,能夠精確模擬真實的自動駕駛場景。同時,還需要模擬物理規(guī)律、車輛與周圍環(huán)境物體之間的交互以及準確模擬空間位置關(guān)系,確保各個物體在虛擬場景中的位置和姿態(tài)符合實際情況,也是渲染過程中的關(guān)鍵難點。
多傳感器的仿真
對于向高階智駕(L2+)發(fā)展的自動駕駛仿真系統(tǒng)來說,傳感器的數(shù)量和種類也在顯著增加。除了基本的虛擬場景渲染,SimOne 平臺還需要支持多路不同攝像機的仿真,這進一步增加了系統(tǒng)的復雜性和 GPU 渲染性能要求。特別是對于性能要求更高的魚眼鏡頭,其超廣角的視野和特殊的成像特性對渲染系統(tǒng)提出了更高的挑戰(zhàn),帶來了更大的數(shù)據(jù)量和更復雜的圖像處理需求,如何在保證圖像質(zhì)量的同時,又不降低系統(tǒng)的運行效率,是需要解決的關(guān)鍵問題。
仿真數(shù)據(jù)的同步性
同一場景內(nèi)不同攝像機之間的協(xié)同工作、數(shù)據(jù)同步等問題都需要被妥善解決。為了確保測試結(jié)果的準確性和可靠性,不同攝像機渲染出的數(shù)據(jù)必須保持高度的同步性。任何一絲的同步誤差都可能導致測試結(jié)果的偏差,因此對同步性的要求極為嚴格。
合成數(shù)據(jù)數(shù)量與穩(wěn)定性
訓練自動駕駛算法需要海量的數(shù)據(jù),才能讓 AI 模型充分學習到各種場景下正確決策方式。然而,真實路采的數(shù)據(jù)大多都是無效數(shù)據(jù),對于特定的場景訓練則需要海量的合成數(shù)據(jù)。對于仿真使用的合成數(shù)據(jù),數(shù)量和數(shù)據(jù)生成的穩(wěn)定性都有著極高的要求。在長時間、高強度的合成數(shù)據(jù)生成過程中,系統(tǒng)的穩(wěn)定性和可靠性至關(guān)重要,GPU 和驅(qū)動的故障以及溫度失控都會導致性能下降,將嚴重影響整個開發(fā)進度。
加速端到端仿真系統(tǒng)的實踐落地
3
賦能實時多傳感器仿真
在自動駕駛領(lǐng)域,硬件在環(huán)(HIL)測試是自動駕駛方案的關(guān)鍵環(huán)節(jié)。HIL 測試的一大特點就是對仿真有實時性要求,它通過實時模擬真實駕駛環(huán)境中的各種場景和條件,對自動駕駛系統(tǒng)的硬件和軟件進行測試和驗證。攝像頭仿真產(chǎn)生的圖像序列,既可以直接軟件的方式接入自動駕駛感知系統(tǒng),也可以通過視頻注入的方式,或者是黑箱的方式進行 HIL 測試。
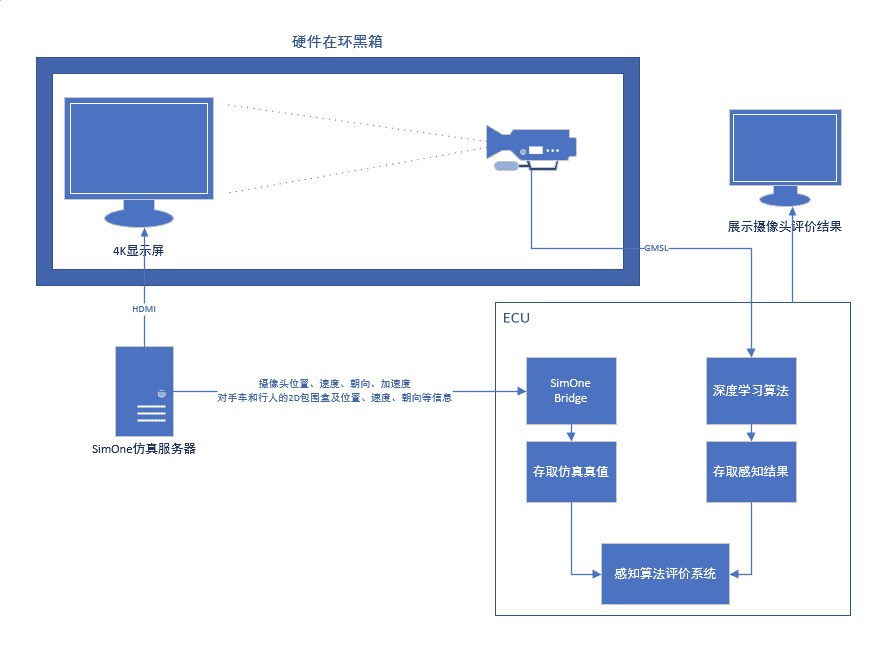
▲ SimOne HIL 攝像頭在環(huán)黑箱檢測評價系統(tǒng)的架構(gòu)示意圖
2025 51Sim
此圖片由 51Sim 提供,如果您有任何疑問或需要使用此圖片,請聯(lián)系 51Sim(下同)
SimOne 攝像頭在環(huán)黑箱檢測評價系統(tǒng)中,黑箱內(nèi)的專業(yè)顯示屏受 SimOne 仿真控制器控制,主要負責運行 SimOne 仿真駕駛場景。在多路攝像的 HIL 測試中,借助由麗臺科技提供的基于 NVIDIA RTX 5880 Ada 多 GPU 仿真方案,SimOne 仿真控制器可以對多路攝像頭視頻進行實時渲染,每個 GPU 渲染其負載能力范圍內(nèi)一定數(shù)量的攝像頭,以保證能夠輸出穩(wěn)定幀率的視頻信號。
RTX 5880 Ada 具備 48GB GDDR6 顯存以及 14,080 個 CUDA 核心,通過將復雜的圖形計算任務分配到多個計算核心上并行處理,大大提高了數(shù)據(jù)處理速度。針對自動駕駛場景中的動態(tài)物體渲染,GPU 能夠快速計算物體的運動軌跡和光影變化,確保在高負載情況下也能保持較高的幀率。在 51Sim 的 SimOne HIL 方案中,對于三車道路口、無其他車輛的仿真場景(如下圖所示),單卡 RTX 5880 Ada GPU 可以支持虛擬場景 3 路 4K 或者 1 路魚眼攝像頭穩(wěn)定的 30FPS 輸出。
同時,借助 NVIDIA Quadro SyncⅡ 同步卡可以保障幀同步輸入,從而保持多路信號的渲染場景的一致性。這種方案不僅能夠滿足多路攝像機和魚眼鏡頭的支持需求,還能確保渲染數(shù)據(jù)的同步性,為 HIL 測試提供了可靠的保障。
具體來說,在 51Sim 的 SimOne HIL 方案中,多工作站集群下使用 6-8 張 RTX 5880 Ada 顯卡可以支持多達 11 路攝像頭(當前中高端車型的主流配置)注入,基本能覆蓋現(xiàn)有的仿真需求,大大提升了系統(tǒng)的擴展性和靈活性,能夠根據(jù)不同的測試需求進行配置。
加速多傳感器數(shù)據(jù)合成
基礎的模型訓練需要大量的合成數(shù)據(jù),生產(chǎn)合成數(shù)據(jù)的一種方式是仿真場景的渲染。RTX 5880 Ada GPU 憑借其大顯存的優(yōu)勢,虛擬場景中能夠在增加 4K 渲染路數(shù)的同時,顯著提升視頻渲染生成的效率,保證渲染質(zhì)量。
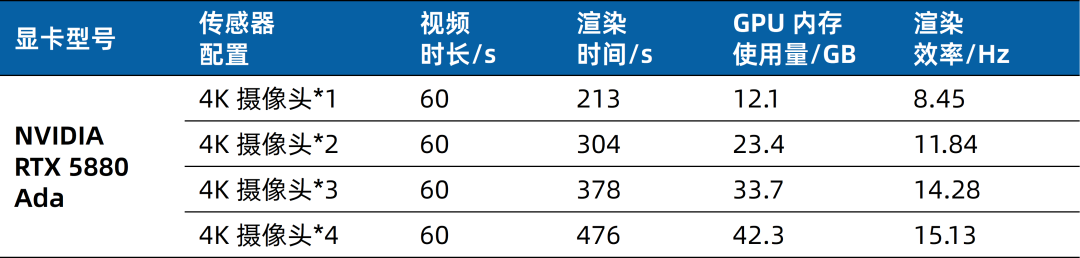
在如上圖所示的綜合城區(qū)、有稀疏交通流的仿真場景下,合成輸出 60 秒、幀率為 30FPS、碼率為 32768 的視頻,單張 RTX 5880 Ada 進行 3 路 4K 的渲染輸出時,能調(diào)用 33.7GB GPU 內(nèi)存,最終渲染效率為 14.28(渲染效率 = 攝像頭數(shù)量 × 視頻幀率 × 視頻時長 / 渲染時間)。而 4 路 4K 渲染輸出可以調(diào)用 42.3GB GPU 內(nèi)存,效率則提升至 15.13。RTX 5880 Ada GPU 顯存為 48GB,因此可以同時支持更多的攝像頭高效渲染。
RTX 5880 Ada GPU 在處理大量渲染任務時,不僅能夠支持更多的合成數(shù)據(jù)并行渲染,還能在長時間、高強度的工作狀態(tài)下,提供出色的可靠性和穩(wěn)定性,確保了合成數(shù)據(jù)的質(zhì)量和數(shù)量,為 SimOne 自動駕駛算法的訓練提供了堅實的基礎。
為了提高數(shù)據(jù)的有效性,提高場景生成的效率,51Sim 也在探索 AI 生成合成數(shù)據(jù)的方案,即使用視頻生成模型,輸入動靜態(tài)結(jié)構(gòu)化場景,輸出多視角一致的攝像頭合成數(shù)據(jù)。不同的攝像頭或傳感器配置會產(chǎn)生不同分辨率和幀率的視頻數(shù)據(jù),數(shù)據(jù)量巨大。也同樣需要 RTX 5880 Ada 強大算力以及穩(wěn)定性的支持。
51Sim CEO
“當然這個合成數(shù)據(jù)的集群是要全自動化全天候運行的,所以對顯卡的負載是非常大的。顯卡在這上面 24 小時在運行數(shù)據(jù),所以這塊我們也采用了專業(yè)卡的方案。隨著合成數(shù)據(jù)需求的增加,這個故事可能剛開始。”
*與NVIDIA產(chǎn)品相關(guān)的圖片或視頻(完整或部分)的版權(quán)均歸NVIDIA Corporation所有。
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7250瀏覽量
91552 -
仿真
+關(guān)注
關(guān)注
52文章
4255瀏覽量
135551 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14266瀏覽量
170203
原文標題:案例分享丨智駕護航,RTX 5880 Ada 助力 51Sim 完成端到端仿真與數(shù)據(jù)合成實踐
文章出處:【微信號:Leadtek,微信公眾號:麗臺科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
51Sim利用NVIDIA Cosmos提升輔助駕駛合成數(shù)據(jù)場景的泛化性
NVIDIA Omniverse與RTX 5880 Ada驅(qū)動工廠數(shù)字孿生
一文帶你厘清自動駕駛端到端架構(gòu)差異

東風汽車推出端到端自動駕駛開源數(shù)據(jù)集
技術(shù)分享 |多模態(tài)自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試

NVIDIA RTX 5880 Ada顯卡部署DeepSeek-R1模型實測報告

NVIDIA RTX 4500 Ada與NVIDIA RTX A5000的對比
NVIDIA RTX 5880 Ada助力51Sim加速端到端仿真系統(tǒng)的實踐落地

端到端自動駕駛技術(shù)研究與分析
端到端已來,智駕仿真測試該怎么做?


連接視覺語言大模型與端到端自動駕駛

端到端InfiniBand網(wǎng)絡解決LLM訓練瓶頸

端到端測試用例怎么寫
實現(xiàn)自動駕駛,唯有端到端?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論