 佛山智能裝備技術研究院機器人動力學研究成果取得世界級突破
佛山智能裝備技術研究院機器人動力學研究成果取得世界級突破
以下文章來源于佛山智能裝備技術研究院,作者黃石峰
佛山智能裝備技術研究院(以下簡稱“智能裝備院”)在蛇年伊始迎來了“開門紅”,其機器人動力學研究取得了世界級突破!
近日,智能裝備院收到國際期刊IEEE Transactions on Robotics(簡稱IEEE T-RO)發來的賀信,祝賀其研究成果“An Analytical Approach for Dealing with Explicit Physical Constraints in Excitation Optimization Problems of Dynamic Identification”被正式錄用。該研究由智能裝備院關鍵技術實驗室創新團隊牽頭,實驗室主任黃石峰博士為第一完成人,香港科技大學機械及航空航天工程學系段默龍教授為通訊作者,智能裝備院常務副院長周星、英國埃克塞特大學計算機科學學院計算智能領域青年專家李帆博士為共同完成人。
IEEE T-RO與Science Robotics(Science子刊)、International Journal of Robotics Research為機器人領域公認的三大頂級期刊,在國際上享有極高盛譽。IEEE T-RO刊發的研究成果代表著機器人學領域的基礎研究重大進步,最先進研究的重磅突破,要求理論和工程實踐上同時推動機器人學的重要發展。
▍研究成果介紹
智能裝備院本次在IEEE T-RO錄用的學術長文(regular paper)徹底突破了長期困擾機器人領域在動力學參數辨識方面生成最優性激勵軌跡所面臨的兩大共識性難題:1)低成功率;2)高耗時。
合適的激勵軌跡是機器人動力學參數辨識準確性的先決條件。激勵軌跡的優化問題在機器人領域被處理成一種帶約束優化的標準范式,需借助啟發式智能優化或基于梯度的數值求解器以迭代的方式對最優解進行搜索,而多關節機器人的物理約束條件使得可行解(即物理可執行的激勵軌跡)的搜索變得異常困難。換言之,在有限迭代步內發現可行解成了一個極具不確定的概率性問題。統計意義下,可行解計算成功率難達90%,耗時往往長達數小時。因此,業內對激勵軌跡的優化僅局限于離線任務中,如機器人本體動力學模型的參數辨識。所述缺陷是機器人領域學術界和工業界從業者們的共識,也直接造成在對于時間有嚴格限制的負載辨識任務中無法在線生成最優激勵軌跡,最終導致負載模型的辨識精度不高。調研發現,包括國際一線品牌機器人都面臨此類挑戰。
智能裝備院提出了一種處理激勵優化問題中物理約束的解析方法,將可行解的求解從不確定的迭代搜索范式轉變為了確定性計算范式,從而使得優化過程中所有候選解都是物理可執行的,首次實現了100%的成功率,同時可以在較短時間內生成滿足最優性準則的持續性激勵軌跡。對于離線類本體辨識任務,激勵優化耗時僅需數百秒;對于負載辨識任務,激勵優化在數秒內完成。因此,無論是在成功率還是在優化耗時方面,相較于現階段激勵優化技術都具有壓倒性優勢。
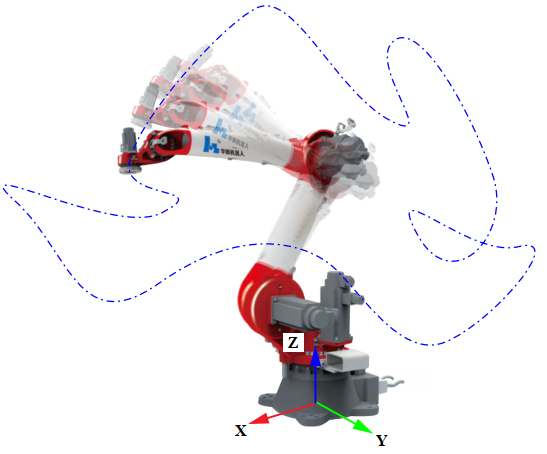
圖2 動力學參數辨識激勵軌跡示意圖
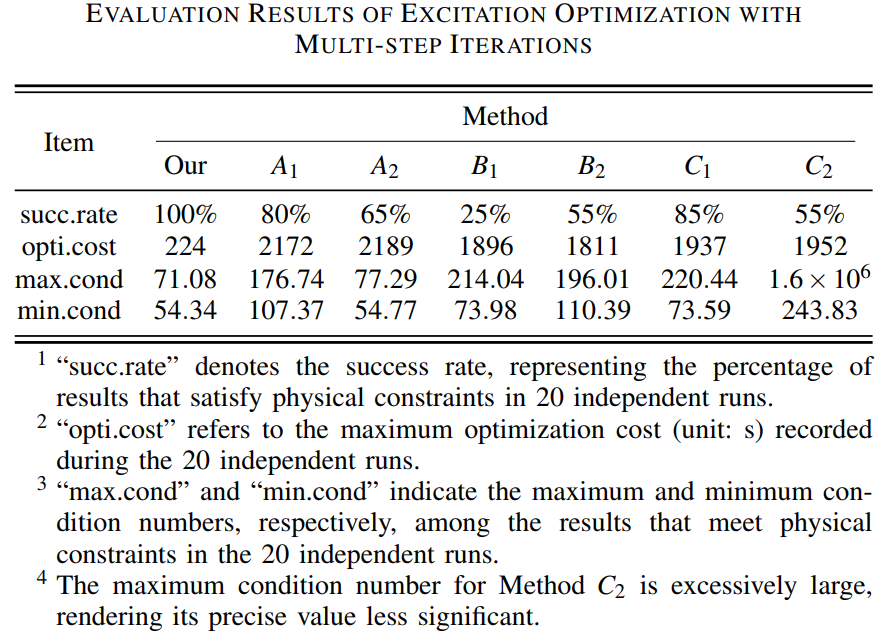
圖3 性能統計對比:本體模型辨識激勵優化
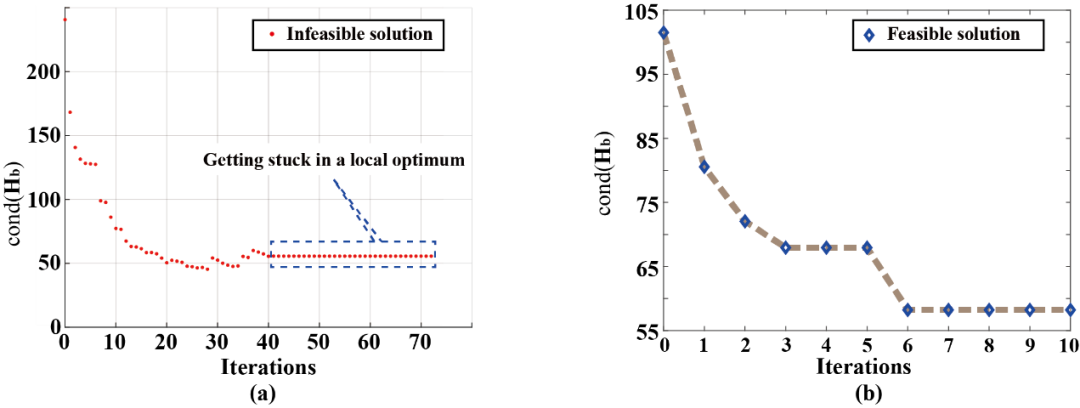
圖4 最優性指標收斂曲線及可行解搜索情況:(a)對比方發;(b)本文方法
▍成果應用與影響
成果已在華數機器人最新一代產品上實現批量應用,實現了負載質量最大估計誤差不超過 0.1 ~ 0.2kg,質量誤差百分比在 0.25% ~ 3.50% 以內的高精度辨識,且突破了負載辨識激勵運動受制于構型的技術瓶頸。成果應用在華數機器人的210公斤大負載機器人“柔性誤差補償技術”上,絕對定位精度有效提升高達91.23%,全工作空間的定位精度波動控制在0.2mm以內,躋身國際領先水平。
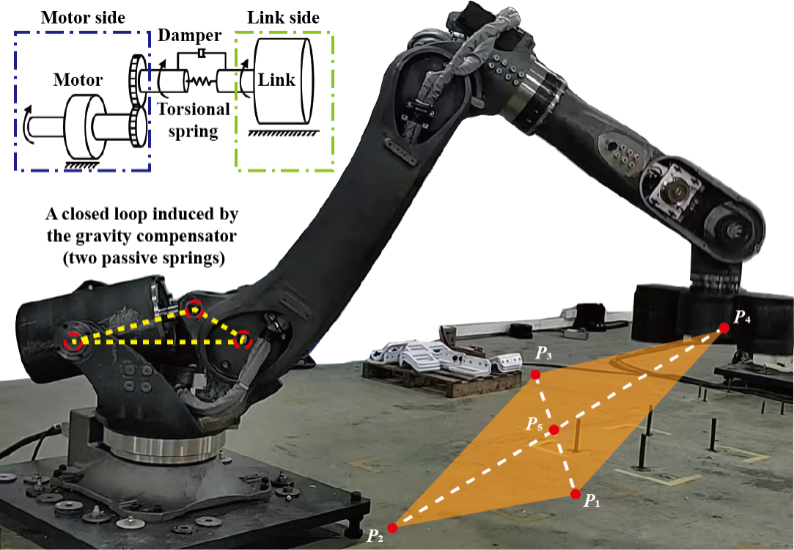
圖5210公斤大負載機器人應用驗證
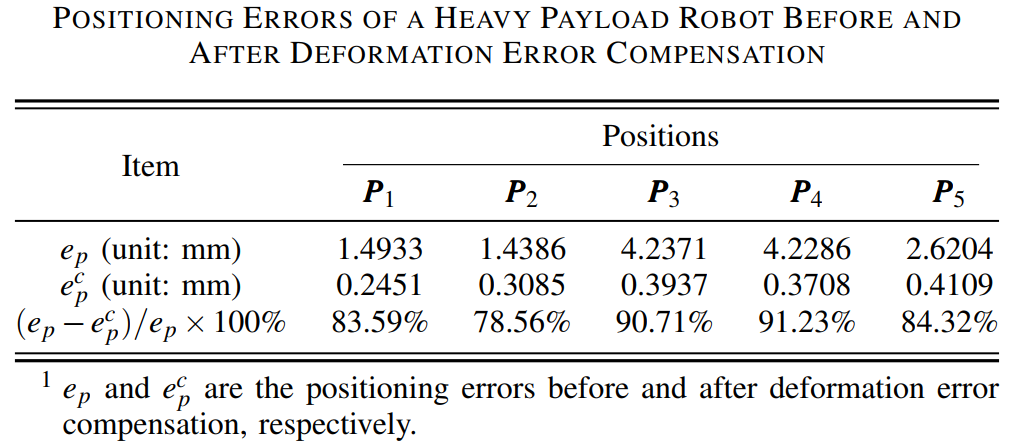
圖6210公斤大負載機器人絕對定位精度提升驗證
該項研究成果得到了國家重點研發計劃青年科學家項目智能機器人專項“機器人剛柔耦合動力學建模與高精度辨識”,香港科技大學與香港科技大學(廣州)“1+1+1”聯合資助的校際合作研究計劃,以及香港科技大學前沿技術研究計劃的共同支持。
該研究成果是世界級的突破,對于機器人領域的動力學研究有著極大的推導作用,具有廣泛的應用面,也為具身智能框架下的動力學融合建模高質量數據收集提供了基座技術。該項創新性研究成果,是在繼智能裝備院黃石峰博士團隊于2021/2022連續兩年在機電領域國際頂級期刊IEEE/ASME Transactions on Mechatronics上發表論文之后,取得的更高水平且更具影響力的研究成果。標志著智能裝備院在機器人的基礎研究、智能機器人、具身智能等方面具有堅實水平和卓越的創新能力。
-
機器人
+關注
關注
213文章
29533瀏覽量
211719 -
智能裝備
+關注
關注
3文章
245瀏覽量
18910 -
華數機器人
+關注
關注
0文章
39瀏覽量
1061
原文標題:世界級突破!佛山智能裝備技術研究院動力學研究成果被機器人領域頂級期刊IEEE T-RO錄用
文章出處:【微信號:HSR華數機器人,微信公眾號:HSR華數機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
導遠科技與清華大學無錫應用技術研究院達成合作
輪式移動機器人電機驅動系統的研究與開發
NVIDIA在ICRA 2025展示多項最新研究成果
Adams多體動力學仿真解決方案全面解析

輪轂電機驅動電動汽車垂向動力學控制研究綜述
華數機器人亮相2025具身智能機器人科技產業金融大會
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
優艾智合與西安交大成立具身智能機器人研究院

“本源悟空”超導量子計算機助力大規模流體動力學量子計算

開啟全新AI時代 智能嵌入式系統快速發展——“第六屆國產嵌入式操作系統技術與產業發展論壇”圓滿結束
直線電機生產廠家談高校建成投用人形機器人研究院





 工商網監
工商網監
評論